
写文章




- @2401_84369443
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
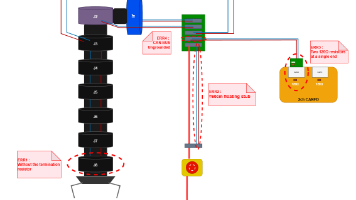
从“能动“到“稳定“:OpenArm 开源机械臂 CAN 通信链路整改指南
摘要:本文分析了开源机器人项目OpenArm在CAN总线物理链路中存在的典型问题,包括60cm悬空分支、终端电阻配置错误和共地问题。这些问题导致信号变形、反射严重和大量错误帧,影响系统稳定性。通过移除悬空线缆、规范终端电阻配置和添加共地线等整改措施,显著改善了通信质量。文章强调开源项目需要工程化优化才能达到工业级可靠性,为开发者提供了实用的CAN总线优化方案。
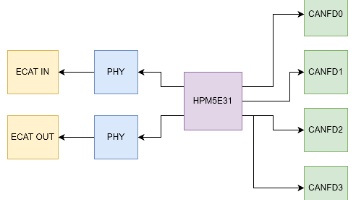
[开源机器人DCU模块]KunHong四路CANFD转EtherCAT
KH-EtherCAT-CANFDX4-OP是一款基于HPM5E31微控制器的开源硬件模块,实现EtherCAT与4路CANFD总线的双向数据转发。该模块支持PDO/SDO映射、CANFD高波特率通信及EtherCAT多从站级联,提供开源硬件方案和基础测试固件,包含EtherCAT从站驱动和4通道CANFD收发功能。用户需具备EtherCAT主站使用、CANFD基础等知识,项目支持商业化定制。演示
到底了