
写文章




- @2301_79857592
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
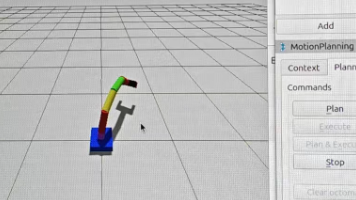
从urdf到rviz2到ros2_control到Moveit2和Gazebo仿真——一个综合的ROS2仿真机械臂训练项目笔记
这是一篇关于ROS2机械臂仿真的学习笔记摘要,主要内容包括: 介绍了Moveit2的功能和原理,它集成轨迹规划、碰撞检测等功能,通过配置助手可快速生成机械臂控制方案。 简述了Gazebo仿真环境和ROS2控制框架(ros2_control)的作用。 详细记录了从基础URDF建模到集成Moveit2和Gazebo的完整开发流程: 手写URDF定义机械臂连杆和关节 添加ros2_control插件实现
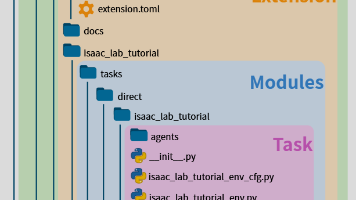
基于云深处lite3的项目对Isaac Lab 文件结构与 各文件作用的分析(学习笔记)
USD 不只是图形格式,而是一个可编程、可组合、带物理语义的场景描述系统,适用于机器人仿真中的高保真建模。USD 是一种层级化的场景描述格式场景由(原语) 构成,每个 Prim 是一个包含属性(如位置、旋转、材质、物理参数等)的节点。多个 Prims 以树状结构组织,形成完整的场景图(Scene Graph),因此你可以形象地称 USD 为 “Prim 树USD 支持复杂几何体不仅限于规则几何体(
到底了