

ORB-SLAM3 installation and operation
Operating environment: Ubuntu 18 04
Installation dependency
Download ORB-SLAM3 source code
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git ORB_SLAM3
Pangolin installation
git clone https://github.com/stevenlovegrove/Pangolin.git
According to the instructions on github, install the dependencies required for Pangolin
- C++11
- OpenGL (Desktop / ES / ES2)
- (lin) sudo apt install libgl1-mesa-dev
- Glew
- (deb) sudo apt install libglew-dev
- CMake (for build environment)
- (deb) sudo apt install cmake
Recommended Dependencies
- Python2 / Python3, for drop-down interactive console
- (deb) sudo apt install libpython2.7-dev
- Wayland
- pkg-config: sudo apt install pkg-config
- Wayland and EGL:sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
sudo apt-get install cmake libeigen3-dev libsuitesparse-dev qtdeclarative5-dev qt5-qmake libqglviewer-dev //Dependencies of g2o sudo apt-get install libboost-dev //Dependencies of DBoW2
Compile and install Pangolin
cd Pangolin mkdir build cd build cmake .. cmake --build .
Opencv (requirement > 3.0) installation steps are omitted
Install boost library
The official website is https://www.boost.org/ , download and unzip, and execute sudo/ bootstrap. SH and sudo/ b2 install
Install libssl dev sudo apt get install libssl dev
ORB-SLAM3 compilation and installation
cd ORB_SLAM3 chmod +x build.sh ./build.sh
Directly executing the compiled script may eat memory and the process is slow. You can also execute build one by one Instructions in Sh
# build. The contents in SH are as follows echo "Configuring and building Thirdparty/DBoW2 ..." cd Thirdparty/DBoW2 mkdir build cd build cmake .. -DCMAKE_BUILD_TYPE=Release make -j cd ../../g2o echo "Configuring and building Thirdparty/g2o ..." mkdir build cd build cmake .. -DCMAKE_BUILD_TYPE=Release make -j cd ../../../ echo "Uncompress vocabulary ..." cd Vocabulary tar -xf ORBvoc.txt.tar.gz cd .. echo "Configuring and building ORB_SLAM3 ..." mkdir build cd build cmake .. -DCMAKE_BUILD_TYPE=Release make -j
Compilation error problem
-
Eigen version problem
Modify ORB_SLAM3/Thirdparty/g2o/CMakeLists.txt version number
Put line 72 FIND_PACKAGE(Eigen3 3.1.0 REQUIRED)
Change to FIND_PACKAGE(Eigen3 REQUIRED)
-
make[2]: *** [CMakeFiles/ORB_SLAM3.dir/build.make:89: CMakeFiles/ORB_SLAM3.dir/src/LocalMapping.cc.o] Error 1 make[2]: *** [CMakeFiles/ORB_SLAM3.dir/build.make:349: CMakeFiles/ORB_SLAM3.dir/src/CameraModels/KannalaBrandt8.cpp.o] Error 1
In the error file, such as kannalbrandt8 cpp,LocalMapping.cc
Add the following code after include
namespace cv { template<typename _Tp, int m, int n> static inline Matx<_Tp, m, n> operator / (const Matx<_Tp, m, n> &a, float alpha) { return Matx<_Tp, m, n>(a, 1.f / alpha, Matx_ScaleOp()); } }
Dataset testing
Using the TUM dataset, https://vision.in.tum.de/data/datasets/rgbd-dataset/download
Monocular
./Examples/Monocular/mono_tum_vi Vocabulary/ORBvoc.txt Examples/Monocular/TUM_512.yaml ./data/dataset-corridor5_512_16/mav0/cam0/data Examples/Monocular/TUM_TimeStamps/dataset-corridor5_512.txt dataset-corridor5_512_mono# The data set path is arbitrarily specified. Here, the data set is placed in the data folder under the current path
RGB-D
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml ./data/rgbd_dataset_freiburg1_desk
The screenshot of the operation is as follows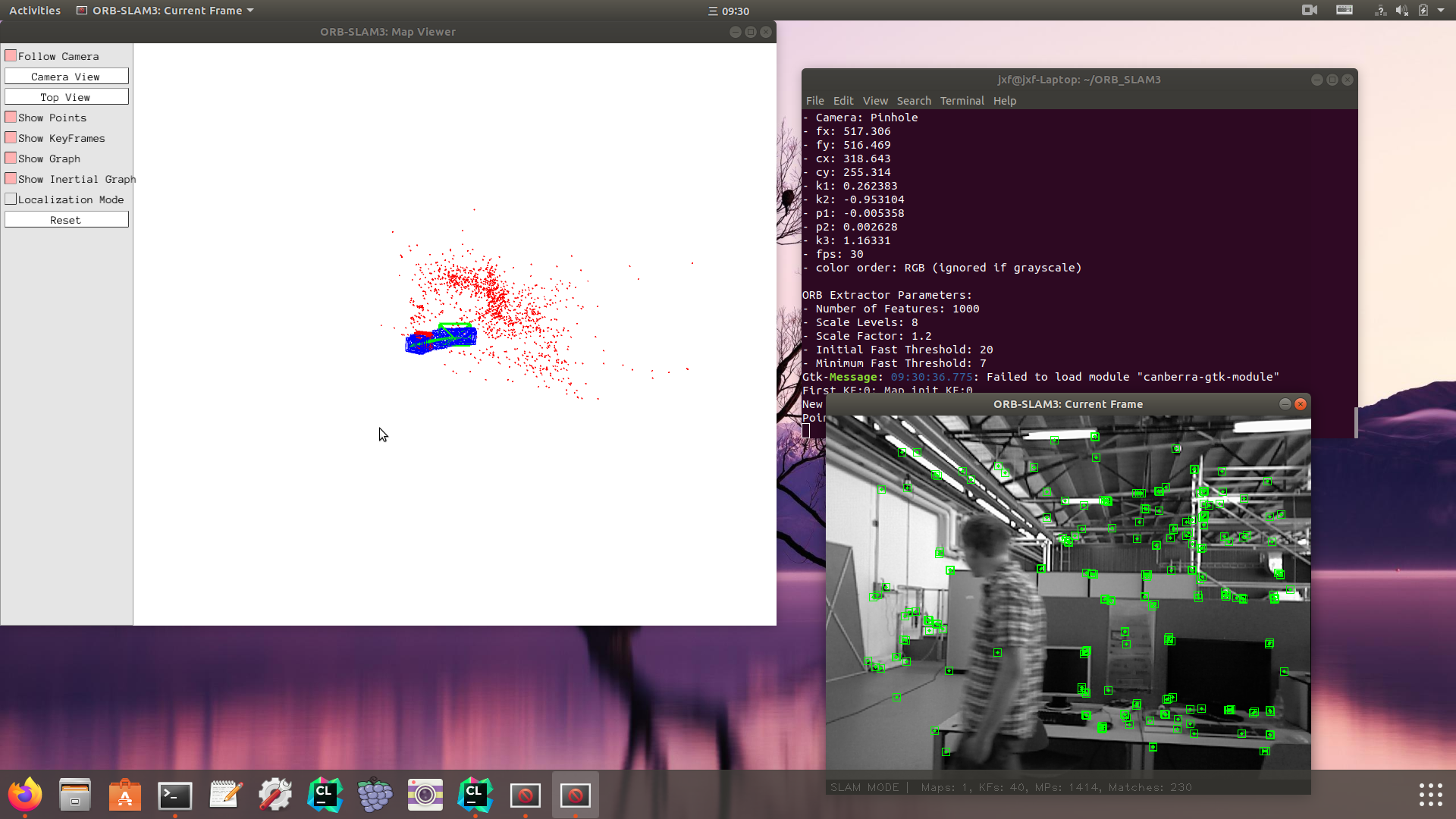
Online test
ROS needs to be installed for online test. Please install it yourself```
Compile first
-
Examples / ROS / orb in the source code_ Add slam3 path to ROS_PACKAGE_PATH environment variable
# open .bashrc file: gedit ~/.bashrc# Add path, # Where PATH is the specific PATH of the machine export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:"PATH"/ORB_SLAM3/Examples/ROS -
Execute build_ros.sh file
chmod +x build_ros.sh./build_ros.sh
If the compilation reports an error, it is probably that / ros/noetic/share has no orb_ The soft connection of slam3 can be solved by executing the following commands
sudo ln -s "PATH"/ORB_SLAM3/Examples/ROS/ORB_SLAM3 /opt/ros/noetic/share/ORB_SLAM3
USB is required for online operation_ CAM software package
sudo apt-get install ros-noetic-usb-cam
Running ORB-SLAM3 with laptop camera
First, modify the source code and enter the directory / ORB_SLAM3/Examples/ROS/ORB_SLAM3/src, modify ros_mono.cc file
// Where / usb_cam/image_raw is the topic of the local camera,
// Using roslaunch USB_ cam usb_ cam-test. When launch tests the camera,
// You can view all topics in the rostopic list
ros::Subscriber sub = nodeHandler.subscribe("/usb_cam/image_raw", 1, &ImageGrabber::GrabImage,&igb);
Open three terminals respectively and run the following commands in turn
roscore roslaunch usb_cam usb_cam-test.launch # Running ORB-SLAM3 with monocular camera rosrun ORB_SLAM3 Mono /home/jxf/ORB_SLAM3/Vocabulary/ORBvoc.txt /home/jxf/ORB_SLAM3/Examples/ROS/ORB_SLAM3/Asus.yaml
Run ORB-SLAM3 with external fisheye camera
In this experiment, a 210 degree fisheye camera (purchased from a treasure, more than 100 rmb) was used
After the computer is connected to the usb camera, first enter the directory / opt / ROS / melody / share / usb_ Cam / launch modify usb_cam-test.launch file, where / dev/video1 (laptop camera) is modified to / dev/video2,
Then go to the directory / ORB_SLAM3/Examples/ROS/ORB_SLAM3/src, modify ros_mono.cc file
//Where / usb_cam/image_raw is the topic of the local camera,
//Using roslaunch USB_ cam usb_ cam-test. When launch tests the camera,
//You can view all topics in the rostopic list
ros::Subscriber sub = nodeHandler.subscribe("/usb_cam/image_raw", 1, &ImageGrabber::GrabImage,&igb);
Then it can be run. Open three terminals respectively and run the following commands in turn
roscore roslaunch usb_cam usb_cam-test.launch # Running ORB-SLAM3 with monocular camera rosrun ORB_SLAM3 Mono /home/jxf/ORB_SLAM3/Vocabulary/ORBvoc.txt /home/jxf/ORB_SLAM3/Examples/ROS/ORB_SLAM3/Asus.yaml
The screenshot of the operation is as follows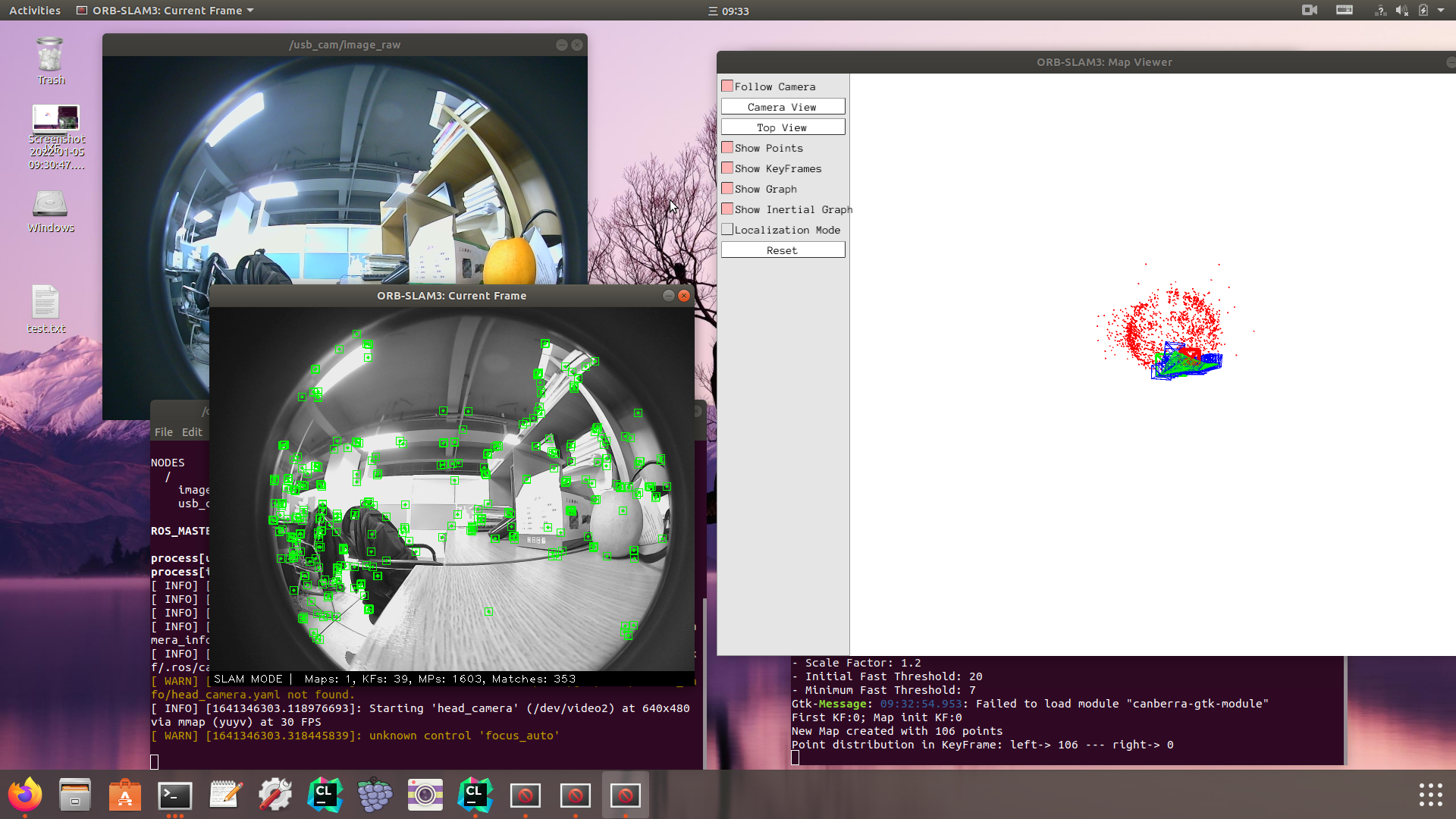
If ROS runs ORB-SLAM3 and reports an error Segmentation fault (core dumped), it may be because
ORB_SLAM3/Thirdparty/DBoW2/CMakeLists.txt and ORB_SLAM3/CMakeLists.txt specifies opencv 4 But ORB_SLAM3/Examples/ROS/ORB_SLAM3/CMakeLists.txt is opencv 3. Modify the former cmakelists Txt specifies that the opencv version is 3,
For example, set(OpenCV_DIR "/usr/local/opencv/3.4.11/share/OpenCV"), it is better to modify all cmakelists to keep the OpenCV version consistent




 已为社区贡献1125条内容
已为社区贡献1125条内容

所有评论(0)