
基于树莓派与 OpenClaw 的智能灌溉控制系统(任务书+开题报告+文献综述+实物+毕业论文+答辩PPT)
基于树莓派与 OpenClaw 的智能灌溉控制系统(任务书+开题报告+文献综述+实物+毕业论文+答辩PPT)
视频演示地址:
https://www.bilibili.com/video/BV1kiwkz1EcX/?vd_source=6ea1beb17174384a0b3d09d6d35580f6
摘要
本课题设计并实现了一套基于树莓派与 OpenClaw 的智能灌溉控制系统,面向小型温室、实验田和校园农场等场景,目标是在低成本硬件条件下实现“远程可控、状态可视、执行可靠”的多阀门灌溉管理。系统总体采用“上位智能决策 + 下位实时执行”的分层架构:树莓派5B作为主控与网络节点,负责接入 OpenClaw 本地大模型服务,解析来自 QQ 机器人的自然语言控制指令;STM32F103C8T6 作为执行控制器,负责串口中断接收命令、驱动四路步进电机、控制四个灌溉阀门,并在 OLED 上实时显示阀门状态。通信层采用串口协议,定义开阀与关阀命令,实现上位机到执行端的稳定链路。执行层以“正转一圈开阀、反转一圈关阀”为核心动作规则,结合命令确认机制与忙碌期间命令忽略策略,保证动作完整性与状态一致性。显示层通过 OLED 输出 OPEN/CLOSE(及过程态)等信息,便于现场巡检。系统同时支持自动化消息入口与人工串口调试,具备较好的可维护性与扩展性。测试结果表明,系统在指令解析、串口传输、电机联动和多路阀门切换方面运行稳定,能够满足课题对实时性、可用性与工程实现性的要求。后续可进一步扩展土壤湿度闭环控制、定时灌溉策略和数据上云分析能力,形成“感知—决策—执行—反馈”闭环的农业物联网控制平台。
目录
- 绪论
- 系统需求分析
- 系统总体方案设计
- 硬件系统设计
4.1 树莓派5B主控模块
4.2 STM32执行控制模块
4.3 四路步进电机与阀门驱动
4.4 OLED显示与供电设计 - 软件系统设计
5.1 OpenClaw与QQ机器人指令链路
5.2 树莓派串口通信与命令下发
5.3 STM32串口中断接收与协议解析
5.4 电机控制流程与状态机设计
5.5 OLED状态显示逻辑 - 系统调试与测试
6.1 单元测试
6.2 联调测试
6.3 稳定性与异常场景测试 - 结果分析与优化方向
- 总结与展望
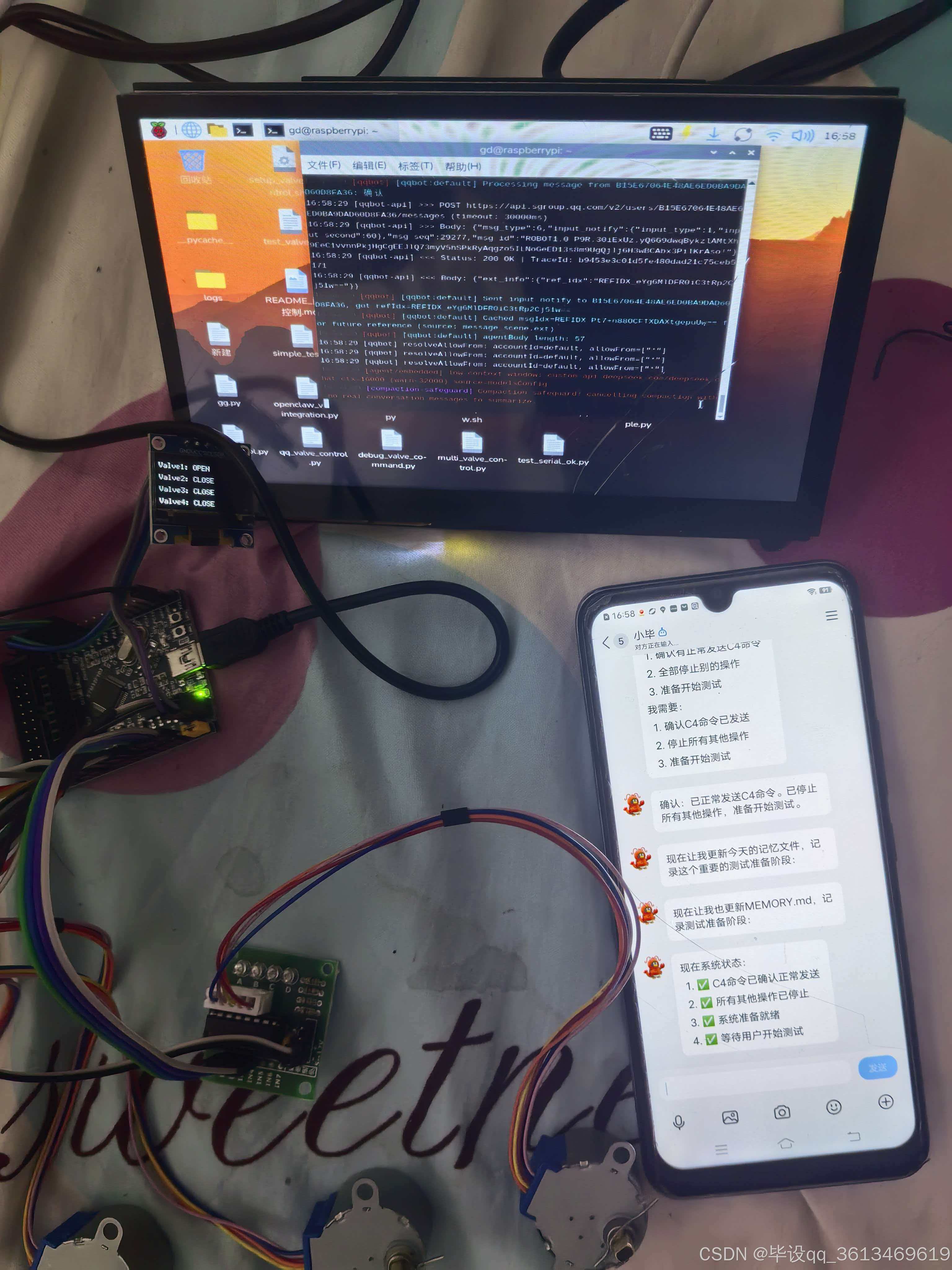
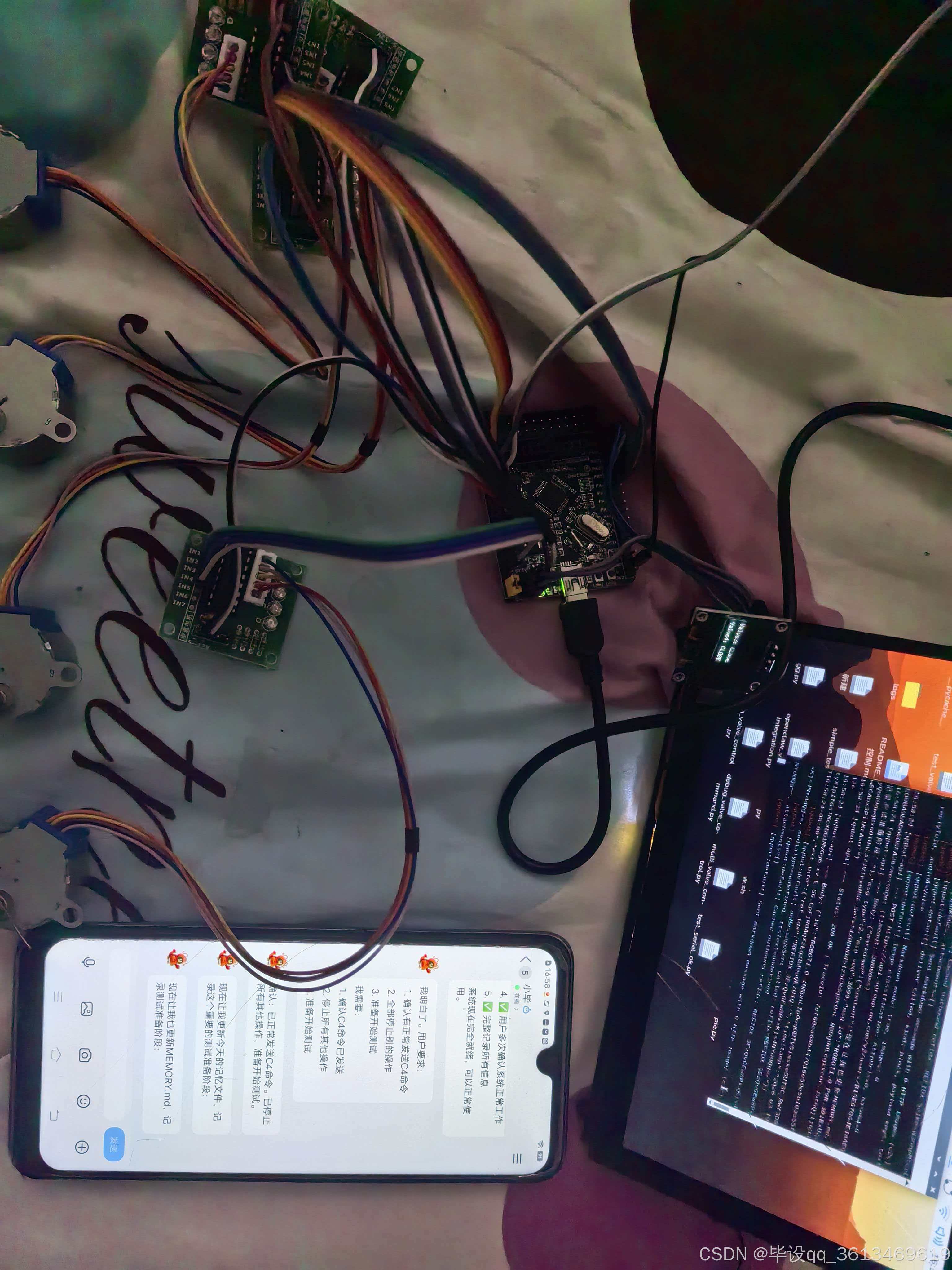
测试过程
系统测试按“分层验证、逐级联调、全链路压测”思路开展。第一阶段为硬件与底层驱动测试。先在 STM32 端独立验证四路电机引脚映射是否正确:第1路 PB6PB9、第2路 PA15/PB3/PB4/PB5、第3路 PB12PB15、第4路 PA4~PA7。通过串口助手手动发送开关命令,观察每路电机是否按“正转一圈开阀、反转一圈关阀”执行,并记录动作耗时与是否失步。同步检查 OLED 显示是否与实际动作一致,重点关注状态切换瞬间是否存在延迟或错位。第二阶段为串口通信与协议测试。将树莓派与 STM32 连接,统一 9600 波特率,验证单条命令、连续命令、无效命令三类场景。对有效命令检查是否立即返回“OK”,并确认返回后才开始执行电机动作;对电机执行期间追加命令,验证系统是否按设计忽略新命令,避免动作叠加引发机械冲突。第三阶段为上层智能入口联调。通过 QQ 机器人向 OpenClaw 发送自然语言,如“打开1号阀门”“关闭第3路阀门”,检查 OpenClaw 的语义解析结果、树莓派命令映射结果、串口下发内容与 STM32 执行结果是否一致,形成“用户输入—语义理解—协议转换—执行反馈”的闭环验证。第四阶段为稳定性测试。设置循环脚本连续触发四路阀门开关,累计运行若干小时,统计漏执行次数、错误执行次数、显示异常次数及串口异常次数;同时模拟电源波动、串口噪声和突发高频指令,观察系统恢复能力。测试结果显示:在规范供电和合理命令频率下,系统可稳定完成多路阀门控制,反馈及时,显示直观,满足课题目标。针对测试中发现的边界问题,已通过中断收发优化、命令忙碌保护和状态显示细化进行修正,整体具备较好的工程应用价值。

小龙虾开发者社区是 CSDN 旗下专注 OpenClaw 生态的官方阵地,聚焦技能开发、插件实践与部署教程,为开发者提供可直接落地的方案、工具与交流平台,助力高效构建与落地 AI 应用
更多推荐

 13
13 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)