
从频域来分析PID控制器
PI控制器PI控制器的传递函数描述如下:Gc(s)=Kp+KisG_{c}(s)=K_{p}+\frac{K_i}{s}Gc(s)=Kp+sKi对系统Gc(s)=15s+1G_c(s)=\frac{1}{5s+1}Gc(s)=5s+11分别加入PPP控制器G1(s)=KpG_1(s)=K_pG1(s)=Kp和PIPIPI控制器G2(S)=Kps+KisG_2(S)=\frac{..
PI控制器
PI控制器的传递函数描述如下: G c ( s ) = K p ( 1 + 1 T i S ) G_{c}(s)=K_{p}\left(1+\frac{1}{T_{i} S}\right) Gc(s)=Kp(1+TiS1)
对系统 G c ( s ) = 1 5 s + 1 G_c(s)=\frac{1}{5s+1} Gc(s)=5s+11分别加入 P P P控制器 G 1 ( s ) = K p G_1(s)=K_p G1(s)=Kp和 P I PI PI控制器 G 2 ( S ) = K p ( 1 + 1 T i S ) G_2(S)=K_{p}\left(1+\frac{1}{T_{i} S}\right) G2(S)=Kp(1+TiS1)来比较控制性能(其中 K p = 5 ; K i = 1 / 3 K_p=5;K_i=1/3 Kp=5;Ki=1/3):
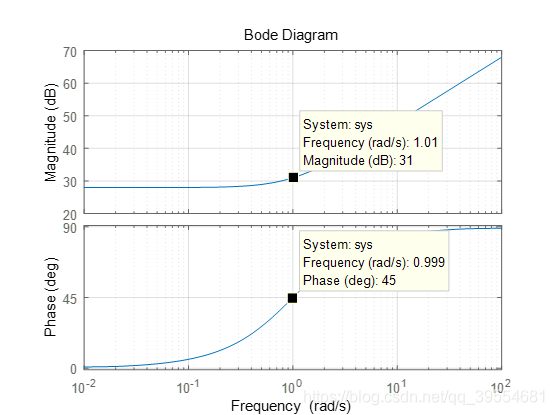
首先绘制各个环节的波德图:
P
I
PI
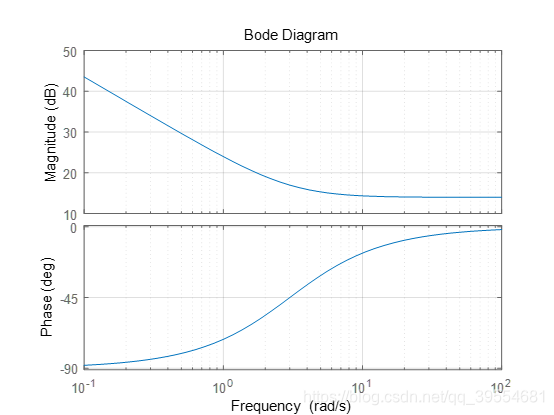
PI控制器的波德图
G
2
(
s
)
G_2(s)
G2(s)
加入
P
P
P控制器的开环波德图
G
(
s
)
=
G
1
(
s
)
G
c
(
s
)
G(s)=G_1(s)G_c(s)
G(s)=G1(s)Gc(s)

加入
P
I
PI
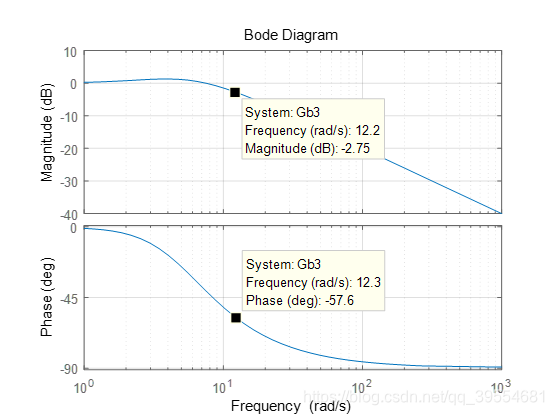
PI控制器的开环波德图
G
(
s
)
=
G
2
(
s
)
G
c
(
s
)
G(s)=G_2(s)G_c(s)
G(s)=G2(s)Gc(s)

加入
P
P
P控制器后的闭环系统波德图
G
(
s
)
=
G
1
(
s
)
G
c
(
s
)
1
+
G
1
(
s
)
G
c
(
s
)
G(s)=\frac{G_1(s)G_c(s)}{1+G_1(s)G_c(s)}
G(s)=1+G1(s)Gc(s)G1(s)Gc(s)

加入
P
I
PI
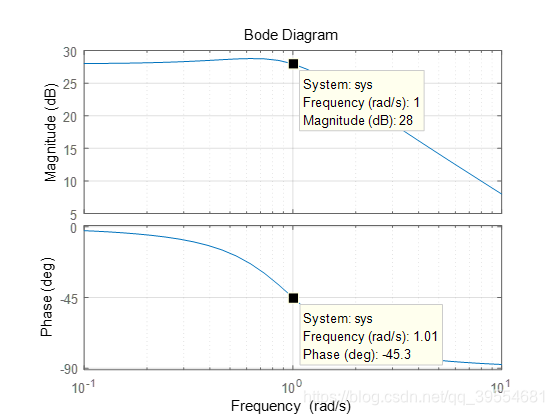
PI控制器后的闭环系统波德图
G
(
s
)
=
G
2
(
s
)
G
c
(
s
)
1
+
G
2
(
s
)
G
c
(
s
)
G(s)=\frac{G_2(s)G_c(s)}{1+G_2(s)G_c(s)}
G(s)=1+G2(s)Gc(s)G2(s)Gc(s)
P
I
PI
PI控制器实际是一种滞后校正装置,具有一个位于
s
=
−
K
i
K
p
s=-\frac{K_i}{K_p}
s=−KpKi的零点和位于
s
=
0
s=0
s=0的极点,因此
P
I
PI
PI控制器特点是在零频率处有无穷大增益,这改善了系统的稳态特性(开环增益增加,稳态误差减小),但是引入积分会使系统型别增加,从而使被校正系统的稳定性降低,甚至失稳;必须适当地选取
K
p
K_p
Kp和
T
s
T_s
Ts的值,使得系统有合适的瞬态响应;
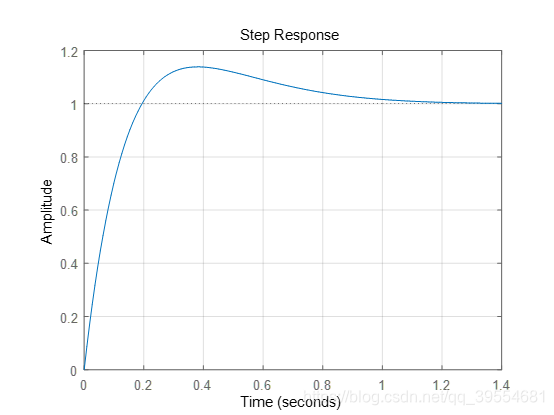
同时可以看出,PI控制器相较于P控制器能使闭环系统有更大的带宽,这表明系统的动态性能会更好,从闭环波德图可以看出PI控制器在截止频率附件分量幅值有所放大,而P控制器没有,这会导致PI控制器有一些超调(如下图)。
P控制器的阶跃响应

P控制器的阶跃响应
值得注意的是,
P
I
PI
PI控制器有时可使系统对阶跃输入的响应呈现相当小的超调量,但此时其响应速度很低,这是因为具有低通特性的
P
I
PI
PI控制器对系统的高频分量进行衰减,使得系统的动态性能变差;引入积分作用能减小或消除稳态误差。适用于控制通道滞后小,负荷变化不太大,工艺上不允许有稳态误差的场合,如流量或压力的控制。
PD控制器
类似的,可以用同样的方法来分析PD控制器
G
c
(
s
)
=
K
p
(
1
+
T
d
s
)
G_{c}(s)=K_{p}\left(1+T_{d} s\right)
Gc(s)=Kp(1+Tds)$
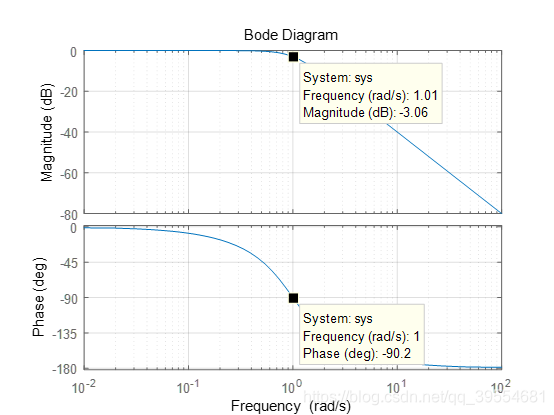
未校正系统的开环波德图
G
(
s
)
=
1
s
2
+
2
s
+
1
G(s)=\frac{1}{s^2+\sqrt{2}s+1}
G(s)=s2+2s+11
PD控制器的波德图
G
c
(
s
)
=
25
(
1
+
s
)
G_c(s)=25(1+s)
Gc(s)=25(1+s)
加入PD控制器后的开环波德图
G
(
s
)
G
c
(
s
)
=
25
(
1
+
s
)
s
2
+
2
+
1
G(s)G_c(s)=\frac{25(1+s)}{s^2+\sqrt{2}+1}
G(s)Gc(s)=s2+2+125(1+s)
PD可以看作是简化版的超前校正,
K
p
K_p
Kp以满足系统稳态误差条件为依据来选取,转角频率
1
/
T
d
1/T_d
1/Td应选择在使相位超前发生在增益交界频率附近;但是当频率大于转角频率时,虽然相角裕度在增加但是校正装置的幅值将持续增加(PD控制器可看作高通滤波器),在高频段的幅值增加是不利于系统稳定的,因为它放大了可能存在于系统内部的高频噪声。而超前校正可以提供充分的相位超前,但是它在高频段的幅值增加比PD小得多,因此,超前校正优于PD;
PD控制引入了微分,会有超前控制作用,能使系统的稳定性增加,加快了控制过程,改善了控制质量。适用于时间滞后较大(相位延迟大)的场合,如加热炉控制。对于滞后很小和扰动作用频繁的系统,应尽可能避免使用微分作用。如同超前校正的作用一样,PD控制器可以改善系统瞬态响应性能,增加系统的稳定性,增加系统的带宽(快速性提高,动态性能变好)。
PID控制器
PID控制器是PI-PD控制的组合,是一种超前-滞后校正装置,PI-PD的作用发生在不同频段,PI控制作用发生在低频段(稳态特性),PD控制作用发生在高频段(动态特性),当系统既需要改善动态特性又需要改善稳态特性时,使用PID控制器。
可以使系统获得较高的控制质量,它适用于容量滞后大、负荷变化大、控制质量要求较高的场合,如反应器、聚合釜的温度控制和无人机位置姿态控制等。
注意:之前的博客中提到,只要闭环系统的带宽足够高,输出就能很好的跟随输入,这种说法是不严谨的;因为各个频率分量通过系统时,不仅仅是幅值有衰减,相位也存在延迟,如果相位延迟过多,信号重新叠加后也有可能和输入差别比较大。因此严谨的说法是:当相位延迟在一定范围内,截止频率越高,输出和输入就越接近。
所以,判断一个系统的性能需要综合考虑它的幅值裕度和相角裕度。

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 24
24 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)