
同步发电机转子的转动惯量与运动方程(二) 同步发电机的转子运动方程
同步发电机转子的转动惯量与运动方程(二) 同步发电机的转子运动方程
由于问题已经特化,因此在(一)部分的计算公式中,转矩、角速度等矢量都共线,此时为了简化计算,如果不做特殊说明,下面的公式均为标量计算。若出现矢量、相量,则用加粗的形式给出。
2.1转子运动中的物理量
2.1.1 转子运动中的“速度”
需要指出的是,在同步发电机的应用中,由于极对数p的存在,而角速度ω又指的是电气角速度,转子在进行旋转时又会有一个机械角速度Ω。因此要明确机械角速度Ω、电气角速度ω、定子电流频率f之间的关系: ω = p Ω ω = pΩ ω=pΩ f = n p 60 f = \frac {np} {60} f=60np ω = 2 π f ω = 2πf ω=2πf 式子中,Ω为机械角速度(rad·s-1),ω为电气角速度(rad·s-1),f为定子电流频率(Hz,s-1),p为极对数。依照电力行业标准,我国电力系统的标准电流频率为50 Hz;而同步发电机根据一次能源的不同,极对数p会有不同的选择:例如,对于水轮机而言,以凸极机居多,若采取四对极设计,则其额定转速为nN=750 r/min,对汽轮机而言,以隐极机居多,即只有一对极,则其额定转速为 nN=3000 r/min。
2.1.2 一些会用到的标幺值
| 物理量(有名值) | 标幺值基准值 | 量纲备注 |
|---|---|---|
| 力矩(转矩)T | T B = S B Ω 0 T_B = \frac {S_B} {Ω_0} TB=Ω0SB | SB:VA(N·m·s−1,kg·m2·s−3) |
| 电气角速度ω | ω B = ω 0 = 2 π f 0 ω_B = ω_0 = 2πf_0 ωB=ω0=2πf0 | ω0为同步角速度,s−1 |
| 时间t | t B = 1 ω 0 = 1 2 π f 0 t_B = \frac {1} {ω_0} = \frac {1} {2πf_0} tB=ω01=2πf01 | ω0为同步角速度,s−1 |
2.1.3 转动惯量与惯性时间常数
发电机组惯性时间常数TJ是指发电机的转轴上加额定转矩TN后,转子从停顿状态加速到额定转速 所需要的时间。直观来讲,如果发电机组惯性时间常数TJ越小,说明转子越容易加速。在标幺值系统中,转动惯量需要转换成惯性时间常数(单位:s)。
在不考虑额外阻尼作用的情况下,同步发电机转子的机械角加速度与作用在其旋转轴上的不平衡转矩应满足:
J
α
⃗
=
J
d
Ω
⃗
d
t
=
Δ
T
⃗
=
T
⃗
T
−
T
⃗
E
J \vec α = J \frac {d \vec Ω} {d t} = Δ \vec T = \vec T_T - \vec T_E
Jα=JdtdΩ=ΔT=TT−TE 类似于平移运动中的牛顿第二定律:
m
a
⃗
=
m
d
v
⃗
d
t
=
F
⃗
m \vec a = m \frac {d \vec v} {d t} = \vec F
ma=mdtdv=F 其中,α为转子机械角加速度(rad·s-2);Ω为转子机械角速度(rad·s-1);J为转子的转动惯量(kg·m2);ΔT为作用在转子旋转轴上的不平衡转矩(N·m kg·m2·s−2),TT为原动机机械转矩(相当于驱动力),TE为发电机电磁转矩(相当于负荷带来的阻力);t为时间(s)。上述物理量除了J与t之外,都是共线的矢量,因此,在接下来的计算中,可以仅靠其数值进行计算,而使用正负区分方向。
当转子以额定机械角速度Ω0(同步转速)旋转时,其旋转动能Wk(单位:J)为:
W
k
=
1
2
J
Ω
2
W_k = \frac {1} {2} J Ω^2
Wk=21JΩ2
J
=
2
W
k
Ω
0
2
J = \frac {2 W_k} {Ω_0^2}
J=Ω022Wk
J
d
Ω
d
t
=
Δ
T
J \frac {d Ω} {d t} = ΔT
JdtdΩ=ΔT 因此有:
2
W
k
Ω
0
2
⋅
d
Ω
d
t
=
Δ
T
\frac {2 W_k} {Ω_0^2} · \frac {d Ω} {d t} = ΔT
Ω022Wk⋅dtdΩ=ΔT 转换成标幺值下的表述(标幺值的右下角会加*号):
2
W
k
Ω
0
2
S
B
Ω
0
⋅
d
Ω
d
t
=
2
W
k
S
B
⋅
Ω
0
⋅
d
Ω
d
t
=
Δ
T
∗
=
T
T
∗
−
T
E
∗
\frac { \frac {2 W_k} {Ω_0^2} } { \frac {S_B} {Ω_0}} · \frac {d Ω} {d t} = \frac {2 W_k} {S_B · Ω_0} · \frac {d Ω} {d t} = ΔT_* = T_T* - T_E*
Ω0SBΩ022Wk⋅dtdΩ=SB⋅Ω02Wk⋅dtdΩ=ΔT∗=TT∗−TE∗ 同时应满足
Ω
=
ω
p
Ω = \frac {ω} {p}
Ω=pω
Ω
0
=
ω
0
p
0
Ω_0 = \frac {ω_0} {p_0}
Ω0=p0ω0 其中,ω0 = ωN 均为同步电气角速度。因此,可以归纳出:
2
W
k
S
B
⋅
ω
0
⋅
d
ω
d
t
=
T
J
ω
0
⋅
d
ω
d
t
=
Δ
T
∗
\frac {2 W_k} {S_B · ω_0} · \frac {d ω} {d t} = \frac {T_J} {ω_0} · \frac {d ω} {d t} = ΔT_*
SB⋅ω02Wk⋅dtdω=ω0TJ⋅dtdω=ΔT∗
T
J
=
2
W
k
S
B
=
J
Ω
0
2
S
B
=
J
ω
0
2
S
B
⋅
p
2
T_J = \frac {2 W_k} {S_B} = \frac {J Ω_0^2} {S_B} = \frac {J ω_0^2} {S_B · p^2}
TJ=SB2Wk=SBJΩ02=SB⋅p2Jω02 其中,TJ为发电机组的惯性时间常数(s)。需要注意的是,有些外文文献会使用H来表示惯性时间常数:
2
H
=
T
J
2H = T_J
2H=TJ
2.1.4 功角的定义
发电机转子的q轴以电气角速度ω旋转(稳态情况下的发电机空载电动势Eq位于q轴的方向上),端电压U以同步电气角速度ω0旋转。
def. 1 功角
定义功角δ为,发电机转子的q轴与端电压U之间的夹角。
由于q轴(包括Eq)与端电压U在空间中都是旋转的,但是在额定工作状态下,ω=ω0,因此,它们之间的空间位置可以保持相对静止,因此此时功角δ也保持不变。一旦发生扰动(不论扰动的大小),导致ω不等于ω0,此时,δ也会随时间变化:
d
δ
d
t
=
ω
−
ω
0
\frac {d δ} {d t} = ω - ω_0
dtdδ=ω−ω0
d
2
δ
d
t
2
=
d
ω
d
t
\frac {d^2 δ} {d t^2} = \frac {d ω} {d t}
dt2d2δ=dtdω
2.2 同步发电机的转子运动方程
为了简化分析,接下来的方程都是建立在极对数p为1的基础上的。此时有ω=Ω。因此,在不考虑阻尼的情况下,纯有名值形式下的转子运行方程(摇摆方程)为: d δ d t = ω − ω 0 \frac {d δ} {d t} = ω - ω_0 dtdδ=ω−ω0 J d ω d t = T T − T E = P T ω − P E ω J \frac {d ω} {d t} = T_T - T_E = \frac {P_T} {ω} - \frac {P_E} {ω} Jdtdω=TT−TE=ωPT−ωPE 或者 d δ d t = ω − ω 0 \frac {d δ} {d t} = ω - ω_0 dtdδ=ω−ω0 J ω d ω d t = P T − P E J ω \frac {d ω} {d t} = P_T - P_E Jωdtdω=PT−PE
2.2.1 运动方程中的第一项标幺化
d δ d t = ( ω ∗ − 1 ) ⋅ ω 0 \frac {d δ} {d t} = (ω_* - 1) · ω_0 dtdδ=(ω∗−1)⋅ω0
2.2.2 运动方程中的第二项标幺化
转矩与转速之积为该转矩的功率,且 Ω Ω B = ω ω B = ω ∗ \frac {Ω} {Ω_B} = \frac {ω} {ω_B} = ω_* ΩBΩ=ωBω=ω∗ 因此在标幺值下,有: P T ∗ = ω ∗ ⋅ T T ∗ P_T* = ω_* · T_T* PT∗=ω∗⋅TT∗ P E ∗ = ω ∗ ⋅ T E ∗ P_E* = ω_* · T_E* PE∗=ω∗⋅TE∗ 因此针对运动方程中的第二项: J d ω d t = T T − T E = P T ω − P E ω J \frac {d ω} {d t} = T_T - T_E = \frac {P_T} {ω} - \frac {P_E} {ω} Jdtdω=TT−TE=ωPT−ωPE 可以按如下形式化简: J S B ω 0 ⋅ d ω d t = T T S B ω 0 − T E S B ω 0 = P T ω ⋅ S B ω 0 − P E ω ⋅ S B ω 0 \frac {J} {\frac {S_B} {ω_0}} · \frac {d ω} {d t} = \frac {T_T} {\frac {S_B} {ω_0}} - \frac {T_E} {\frac {S_B} {ω_0}} = \frac {P_T} {ω · \frac {S_B} {ω_0}} - \frac {P_E} {ω · \frac {S_B} {ω_0}} ω0SBJ⋅dtdω=ω0SBTT−ω0SBTE=ω⋅ω0SBPT−ω⋅ω0SBPE J ω 0 2 S B ⋅ d ω ∗ d t = T T ∗ − T E ∗ = P T ∗ ω ∗ − P E ∗ ω ∗ \frac {J ω_0^2} {S_B} · \frac {d ω_*} {d t} = T_T* - T_E* = \frac {P_T*} {ω_*} - \frac {P_E*} {ω_*} SBJω02⋅dtdω∗=TT∗−TE∗=ω∗PT∗−ω∗PE∗ 同时,在标幺值下,一般认为电气角速度ω* 变化不大,一般取ω * = 1 。因此,可以进一步进行简化: T J d ω ∗ d t = T T ∗ − T E ∗ ≈ P T ∗ − P E ∗ T_J \frac {d ω_*} {d t} = T_T* - T_E* \approx P_T* - P_E* TJdtdω∗=TT∗−TE∗≈PT∗−PE∗ 因此,进一步推导出: T J d ω ∗ d t = P T ∗ − P E ∗ T_J \frac {d ω_*} {d t} = P_T* - P_E* TJdtdω∗=PT∗−PE∗
在标幺值下,可以更加方便地讨论阻尼带来的影响:转子在旋转中受到的风阻、转轴与轴承之间的摩擦力。这些摩擦力对转子产生阻尼转矩,在标幺值下,近似认为该转矩的大小正比于电气角速度ω*,比例系数称为风阻系数D(显然,D没有量纲)。
因此,考虑阻尼效果的运动方程中的第二项的表达为:
T
J
d
ω
∗
d
t
=
P
T
∗
−
P
E
∗
−
D
(
ω
∗
−
1
)
T_J \frac {d ω_*} {d t} = P_T* - P_E* - D(ω_* - 1)
TJdtdω∗=PT∗−PE∗−D(ω∗−1)
2.2.3 最常用转子运动方程形式
综合2.2.1与2.2.2,就可以得到最常用的转子运动方程的标幺形式: d δ d t = ( ω ∗ − 1 ) ω 0 \frac {d δ} {d t} = (ω_* - 1)ω_0 dtdδ=(ω∗−1)ω0 T J d ω ∗ d t = P T ∗ − P E ∗ − D ( ω ∗ − 1 ) T_J \frac {d ω_*} {d t} = P_T* - P_E* - D(ω_* - 1) TJdtdω∗=PT∗−PE∗−D(ω∗−1) 再省略表征标幺值的下标“*”,就得到了教材上最常见的形式: d δ d t = ( ω − 1 ) ω 0 \frac {d δ} {d t} = (ω - 1)ω_0 dtdδ=(ω−1)ω0 T J d ω d t = P T − P E − D ( ω − 1 ) T_J \frac {d ω} {d t} = P_T - P_E - D(ω - 1) TJdtdω=PT−PE−D(ω−1)
虽然看起来这个方程组是线性的,但我们在这里并没有给出PE的完整表达,它的存在就已经决定了方程组的非线性,并在接下来的分析里给我们带来无穷无尽的麻烦:这一组方程将是以小干扰法分析静态稳定的最核心方程。
2.2.4 不同形式的转子运动方程
根据电气角速度ω、时间t是有名值还是标幺值,标幺值下的转子运动方程有多种表达:
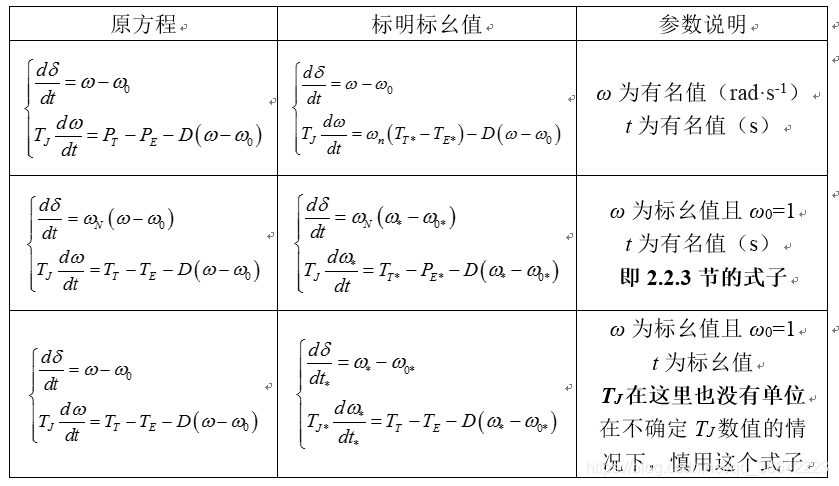
不管怎样,在使用转子运动方程时,一定要做的就是通过判断各个物理量的量纲,以确定各个物理量是标幺值还是有名值,尤其是确定时间t是标幺值还是有名值:
t
∗
=
t
×
t
B
=
100
π
t
t_* = t \times t_B = 100πt
t∗=t×tB=100πt 如果时间t使用错误,会导致我们在用错误的时间尺度研究问题,自然得不到正确的结果。
另外,在不同的文献中,同步电气角速度的变量形式各不相同,但是值都是一样的:
ω
0
=
ω
N
=
ω
B
=
2
π
f
N
ω_0 = ω_N = ω_B = 2πf_N
ω0=ωN=ωB=2πfN 量纲为:rad·s-1。
通过判断电气角速度ω的量纲,可以反推出余下所有物理量的量纲,进而判断各物理量是标幺值还是有名值。
第一部分:基本物理概念
https://blog.csdn.net/qq_38642223/article/details/89289002
参考文献
[1] 李光琦. 电力系统暂态分析(第三版).
[2] 王锡凡. 现代电力系统分析.
[3] https://en.wikipedia.org/wiki/Swing_Equation .

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐


 110
110 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容








所有评论(0)