
UAVCAN GUI Tool 安装及使用
前言 UAVCAN GUI Tool 是用于 UAVCAN 总线管理和诊断的跨平台(Windows / Linux /OSX)应用程序。安装 UAVCAN GUI Tool 是跨平台应用程序,所以在 Linux、Windows、OSX 上都可以安装。因为我的安装环境是 Ubuntu 16.04 LTS,所以本文只讲解 Linux 下的安装和使用。其他操作系统下的安装教程:https:/
前言
UAVCAN GUI Tool 是用于 UAVCAN 总线管理和诊断的跨平台(Windows / Linux /OSX)应用程序。
安装
UAVCAN GUI Tool 是跨平台应用程序,所以在 Linux、Windows、OSX 上都可以
安装。因为我的安装环境是 Ubuntu 16.04 LTS,所以本文只讲解 Linux 下的安装和使
用。其他操作系统下的安装教程:https://github.com/UAVCAN/gui_tool。
sudo apt-get install -y python3-pip python3-setuptools python3-wheel
sudo apt-get install -y python3-numpy python3-pyqt5 python3-pyqt5.qtsvg git-core
sudo pip3 install git+https://github.com/UAVCAN/gui_tool@master
按照官方的介绍,通过这三步的安装就可以使用 uavcan_gui_tool 了。但遗憾的是
在执行第三条指令时,我的电脑报错了(希望你们并不会遇到这种情况)。在经过多次
尝试均无果后,我放弃了。。。
官方还有第二种安装方法,执行以下命令:
pip3 install git+https://github.com/UAVCAN/gui_tool@master
发现还有报错,,,,我发现还有第三种安装方式,我又尝试了第三种。
git clone https://github.com/UAVCAN/gui_tool.gitcd gui_tool
git submodule init
git submodule update
pip3 install .
这次仍有报错,但报错提示比较明显,子模块更新失败了,是因为我的 git 缓冲区不够大造成的。更改 git 缓冲区大小:
git config --global http.postBuffer 2000000000
然后更新子模块,更新后执行 pip3 install .(不要把点丢掉),等命令执行完毕后,在命令行中输入 uavcan_gui_tool,回车后会弹出如下图所示界面。
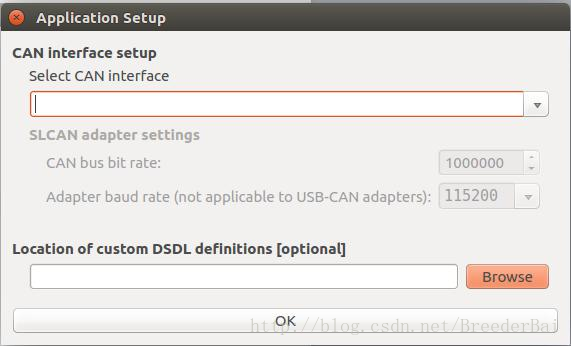
图1
使用
硬件:Zubax Babel、Zubax GNSS 2软件:uavcan_gui_tool
使用 CAN 总线连接 Zubax Babel 和 Zubax GNSS 2( CAN1 或 CAN2) ,使用 USB线连接电脑和 Zubax Babel 模块,然后打开 uavcan_gui_tool。选择 Zubax Babel 对应的驱动,按照如下图所示配置点击 OK。
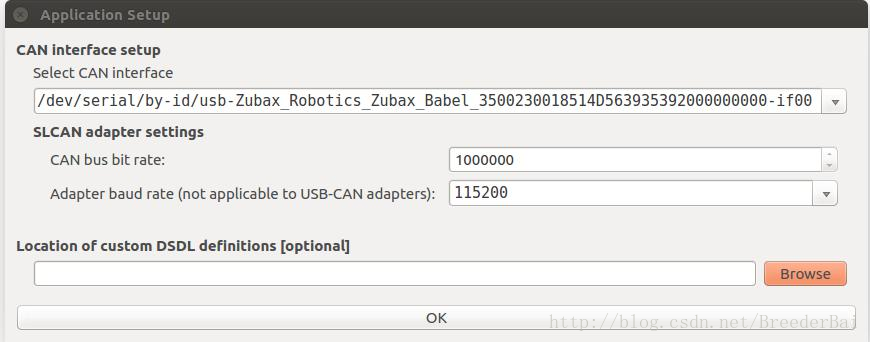
图 2
1. 在下图中左上角点击“对勾”图标
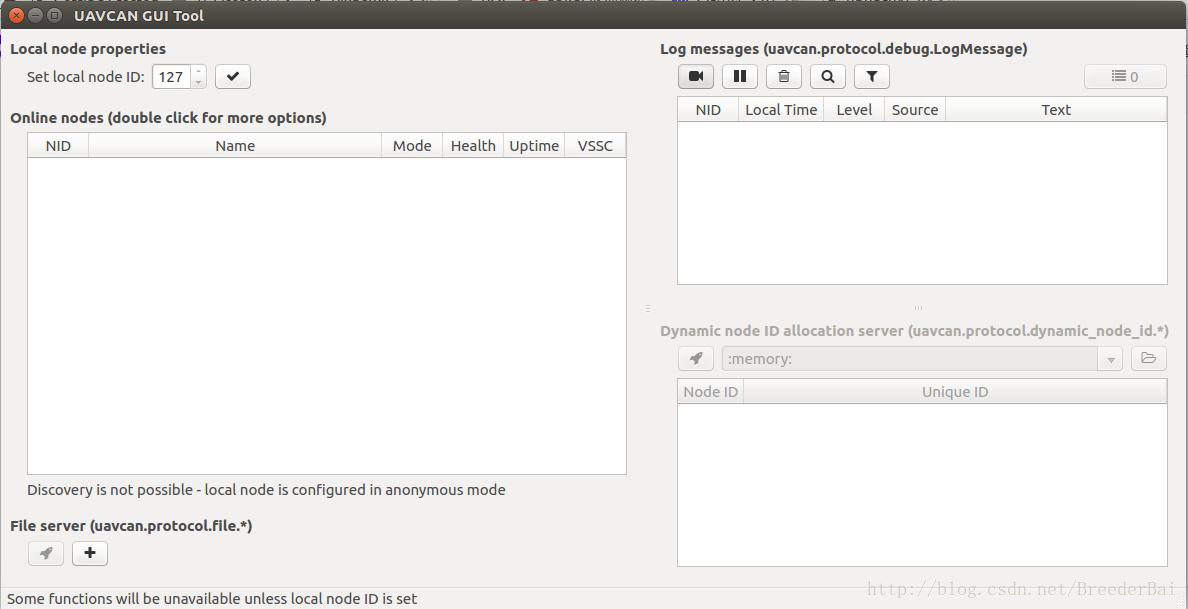
图 3
点击对勾,等 3~5 秒后,界面并不会又什么变化,uavcan_gui_tool 并没有识别出 CAN 总线上的 Zubax GNSS 2 设备。那是因为 Zubax GNSS 2 出厂默认的 node id 是 0。我们点击图 3 中右下角,小火箭样子的图标,为 Zubax GNSS 2 分配动态 node id。
2. 分配 ID 后,结果如下图
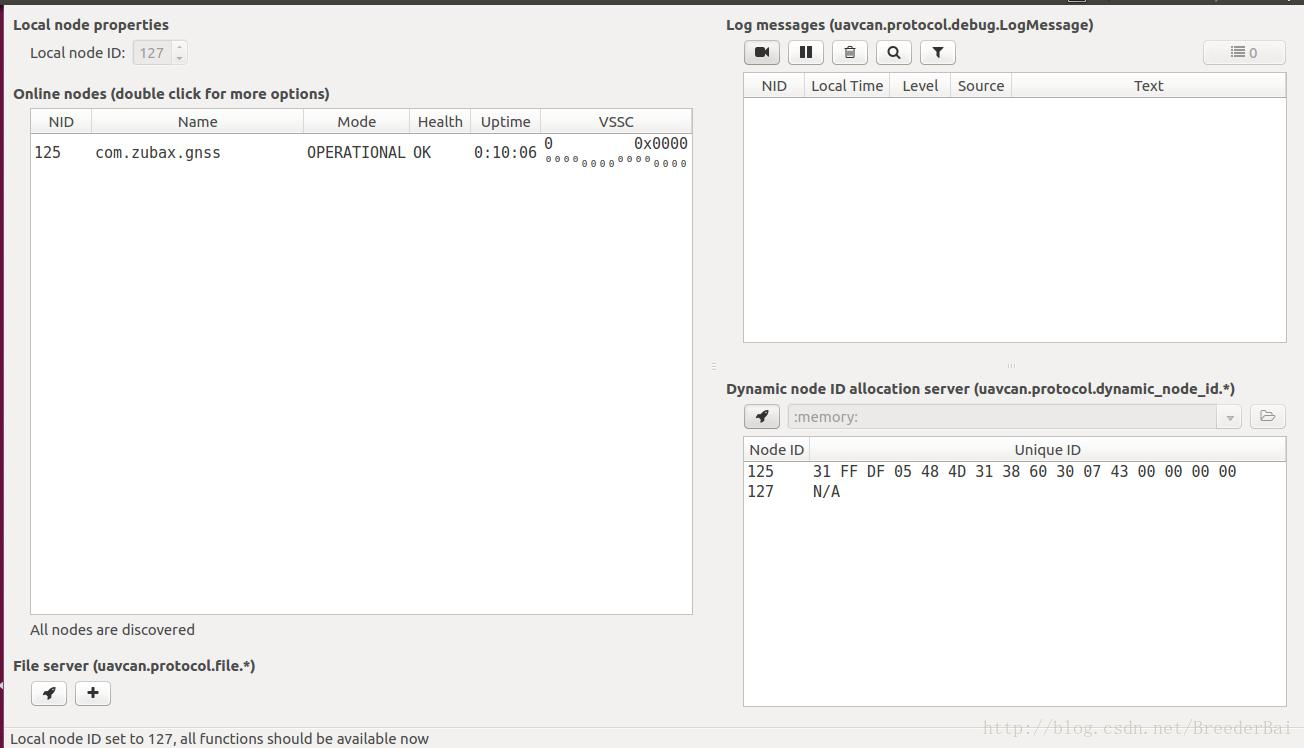
图 4
此时虽然给 Zubax GNSS 2 分配了 ID,但这个 ID 掉电后会消失。需要我们修改 Zubax GNSS2 的 ID 参数。
3. 双击下图中圈出部分,在随后弹出的对话框中点击 Fetch All 按钮,刷新参数。
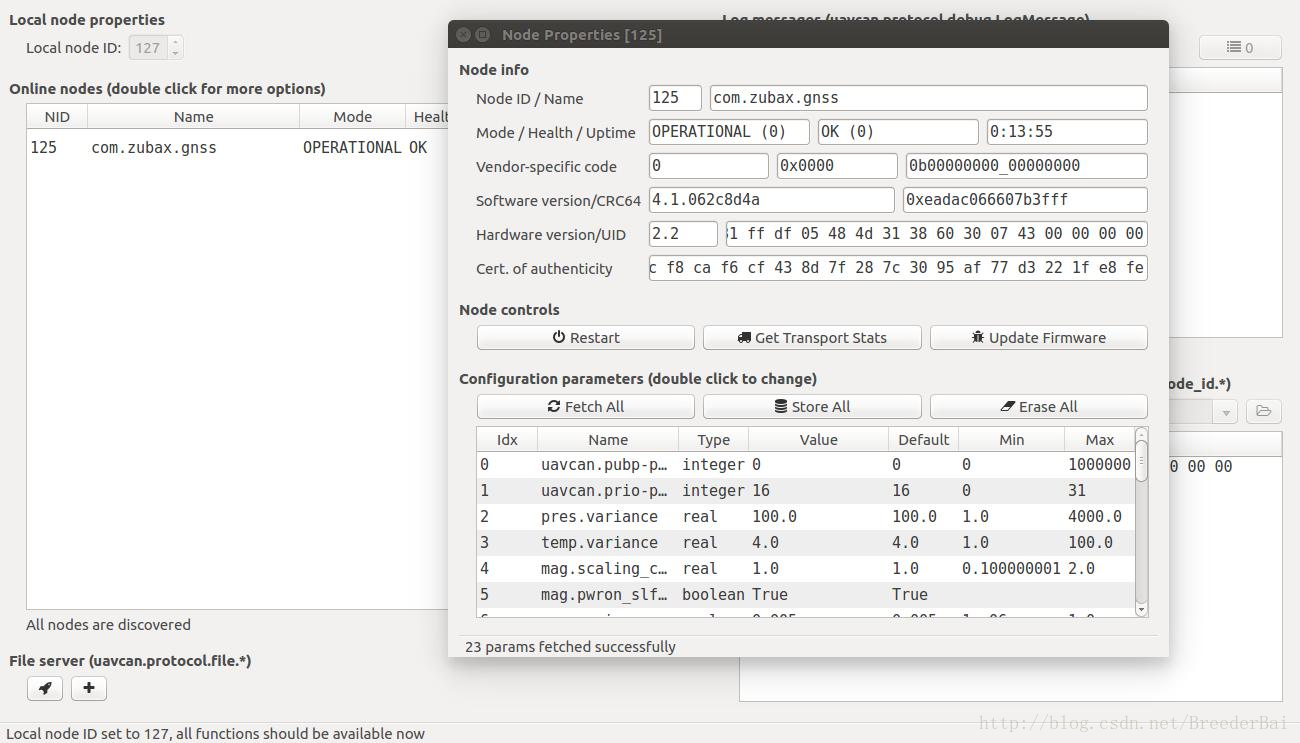
图 5
4. 找到参数 uavcan.node_id 双击,在随后弹出的对话框中设置 ID 值,然后点击 Send。
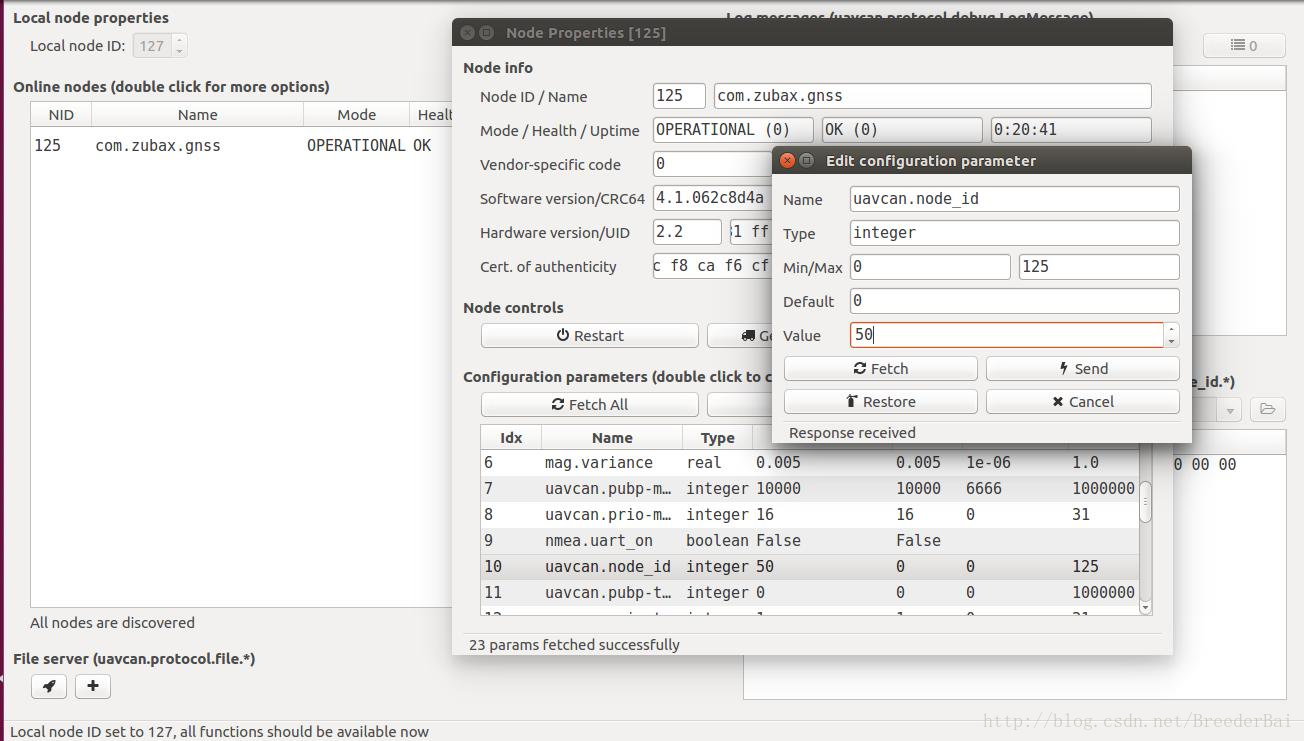
图 6
重启后,设置的 ID 值就生效了,到目前为止,Zubax GNSS 2 就可以工作了。
5. 查看 Zubax GNSS 2 发出的消息,点击左上角的 Tools,然后点击 Bus Monitor。在弹出的界面中,点击左上角的摄像机图标,既可以看到 Zubax GNSS 2 输出的消息了。
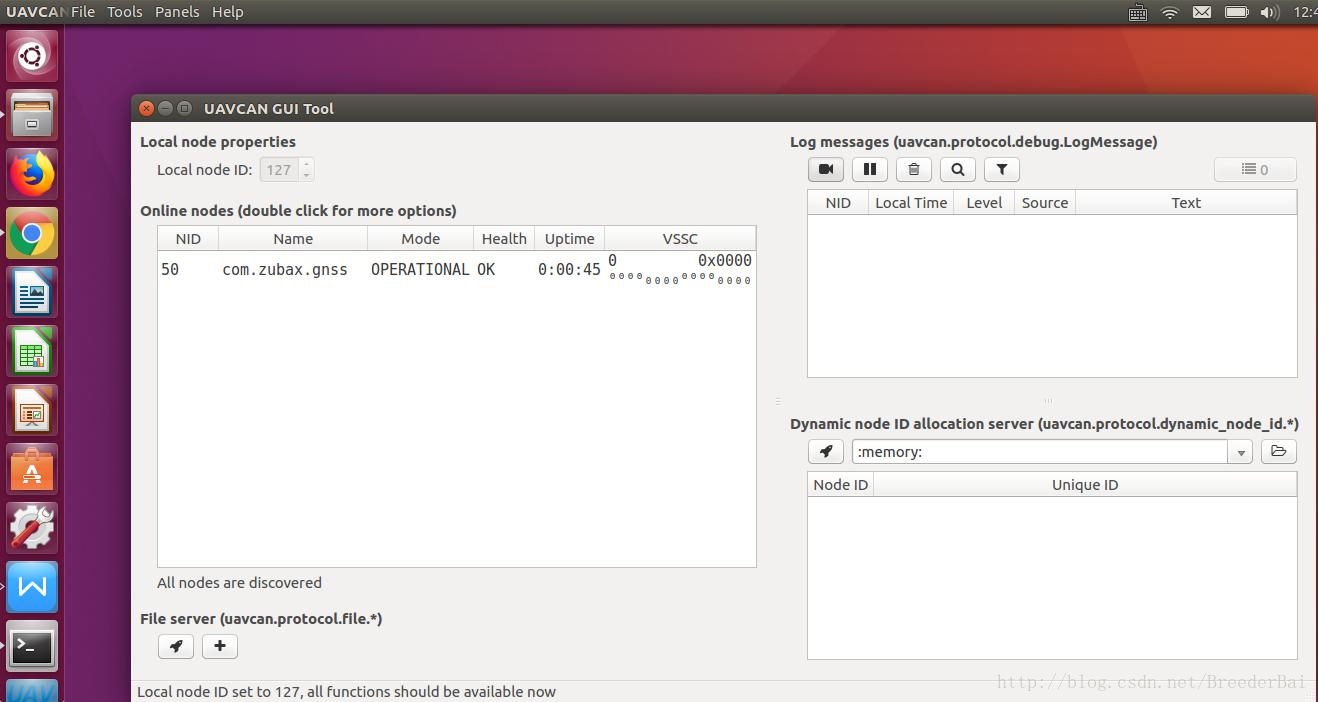
图 7
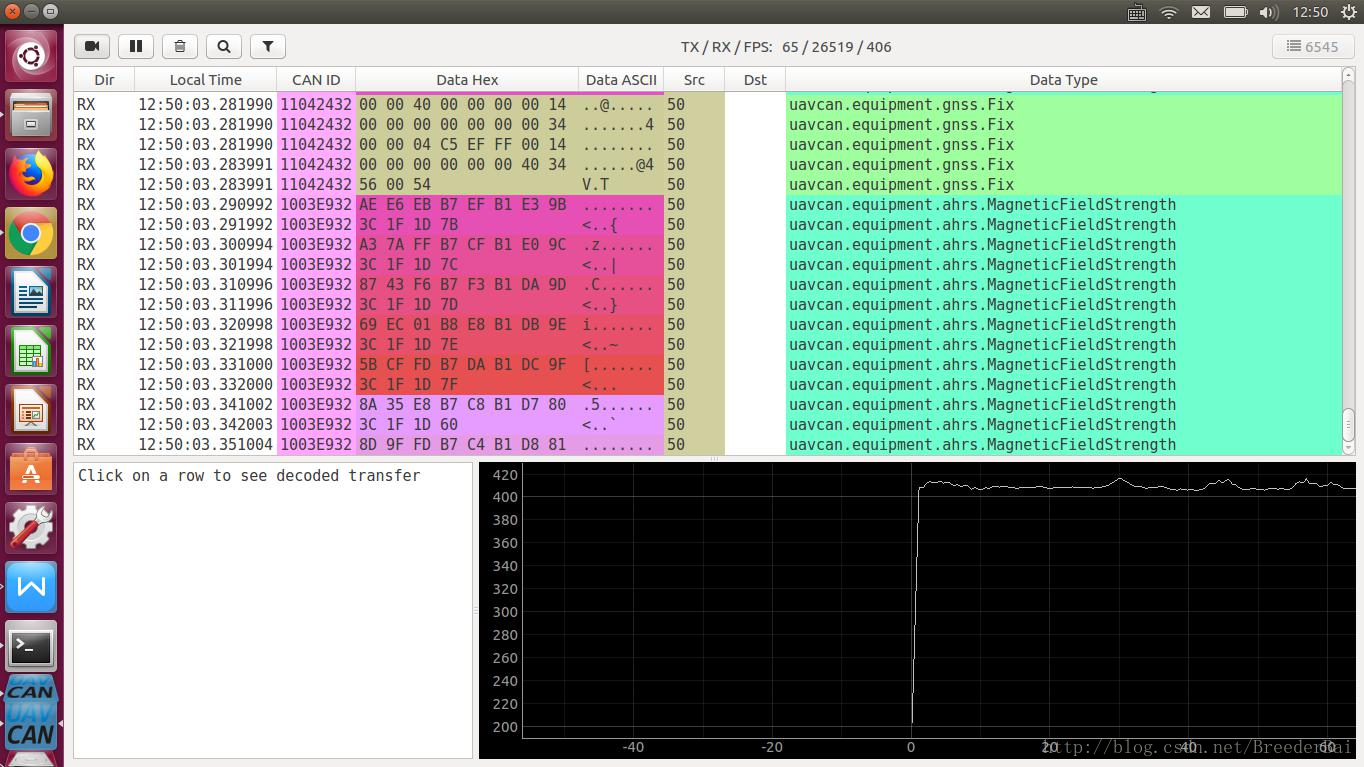
图 8
更多推荐



 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)