PX4 SITL环境添加传感器(雷达、双目相机和下视摄像头)教程
本教程将指导您如何在PX4仿真环境中为无人机添加激光雷达、双目相机和下视摄像头,以便进行算法测试和开发。首先,我们需要创建或确保已有所需的传感器模型。1.2 创建双目相机(Kinect)模型填入以下内容:创建模型配置文件:填入以下内容:1.3 创建激光雷达(RPLidar)模型填入以下内容:创建模型配置文件:填入以下内容:1.4 创建下视摄像头(FPV Cam)模型填入以下内容:创建模型配置文件:
·
本教程将指导您如何在PX4仿真环境中为无人机添加激光雷达、双目相机和下视摄像头,以便进行算法测试和开发。
1. 创建传感器模型
首先,我们需要创建或确保已有所需的传感器模型。
1.1 创建文件夹结构
# 创建传感器模型目录
mkdir -p ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/iris_fusion
mkdir -p ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/kinect_self
mkdir -p ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/rplidar
# 如果下视摄像头模型不存在
mkdir -p ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/fpv_cam
1.2 创建双目相机(Kinect)模型
nano ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/kinect_self/kinect_self.sdf
填入以下内容:
<?xml version="1.0" ?>
<sdf version="1.5">
<model name="kinect_self">
<pose>0 0 0 0 0 0</pose>
<link name="link">
<inertial>
<mass>0.01</mass>
<inertia>
<ixx>4.16666666667e-06</ixx>
<iyy>5.20833333333e-07</iyy>
<izz>3.85416666667e-06</izz>
</inertia>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.023000 0.076000 0.032000</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.023000 0.076000 0.032000</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Red</name>
</script>
</material>
</visual>
<sensor type="depth" name="camera">
<always_on>true</always_on>
<update_rate>30.0</update_rate>
<camera>
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<format>B8G8R8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.4</near>
<far>16.0</far>
</clip>
</camera>
<plugin name="camera_plugin" filename="libgazebo_ros_openni_kinect.so">
<baseline>0.2</baseline>
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>camera_ir</cameraName>
<imageTopicName>/camera/color/image_raw</imageTopicName>
<cameraInfoTopicName>/camera/color/camera_info</cameraInfoTopicName>
<depthImageTopicName>/camera/depth/image_raw</depthImageTopicName>
<depthImageCameraInfoTopicName>/camera/depth/camera_info</depthImageCameraInfoTopicName>
<pointCloudTopicName>/camera/depth/points</pointCloudTopicName>
<frameName>camera_link</frameName>
<pointCloudCutoff>0.5</pointCloudCutoff>
<pointCloudCutoffMax>8.0</pointCloudCutoffMax>
<distortionK1>0</distortionK1>
<distortionK2>0</distortionK2>
<distortionK3>0</distortionK3>
<distortionT1>0</distortionT1>
<distortionT2>0</distortionT2>
<CxPrime>0</CxPrime>
<Cx>0</Cx>
<Cy>0</Cy>
<focalLength>0</focalLength>
<hackBaseline>0</hackBaseline>
</plugin>
</sensor>
<gravity>0</gravity>
</link>
</model>
</sdf>
创建模型配置文件:
nano ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/kinect_self/model.config
填入以下内容:
<?xml version="1.0"?>
<model>
<name>Kinect_self</name>
<version>1.0</version>
<sdf version="1.5">kinect_self.sdf</sdf>
<description>
Kinect 3D camera
</description>
</model>
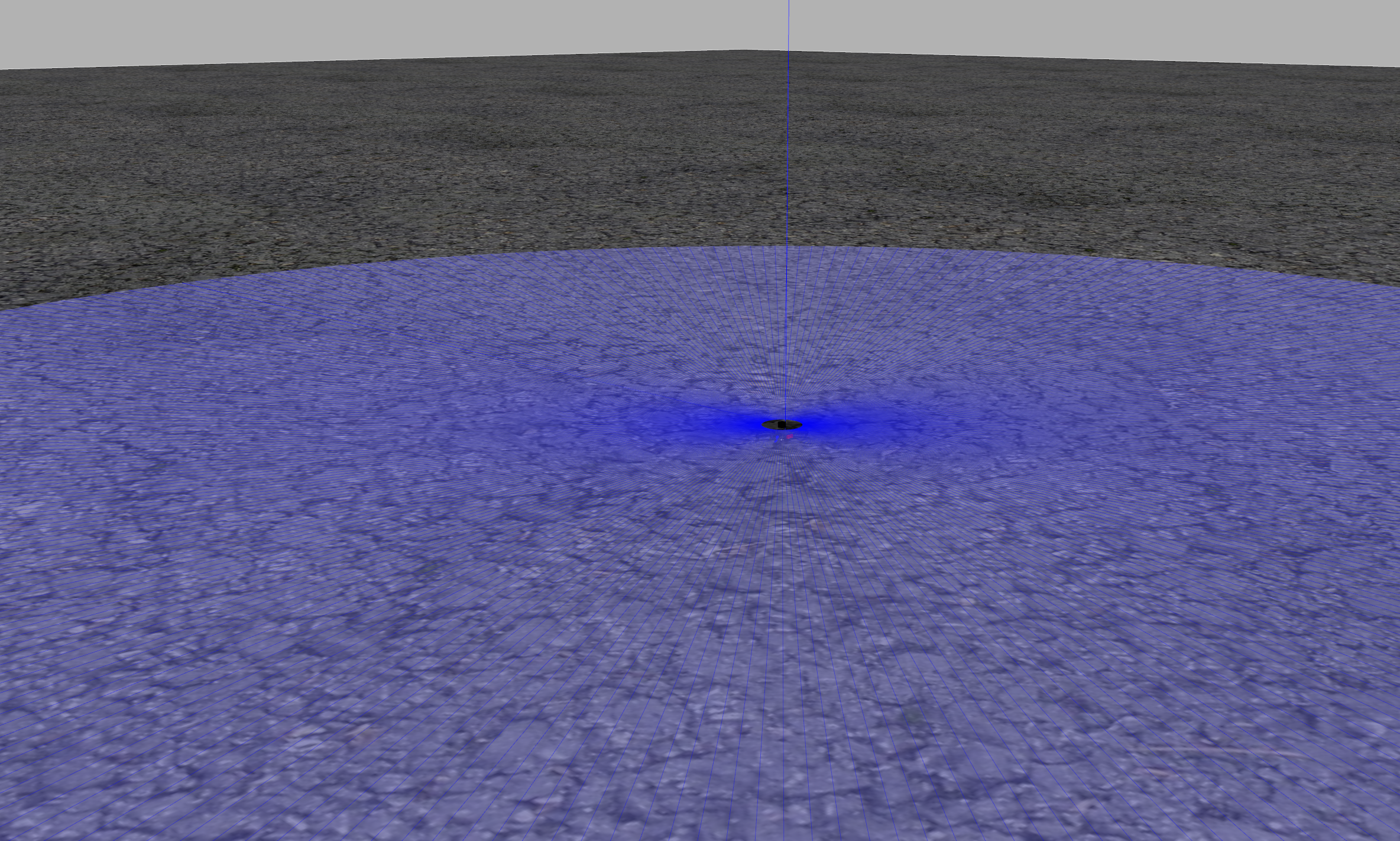
1.3 创建激光雷达(RPLidar)模型
nano ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/rplidar/rplidar.sdf
填入以下内容:
<?xml version="1.0" ?>
<sdf version="1.5">
<model name="rplidar">
<link name="link">
<inertial>
<pose>0 0 0 0 0 0</pose>
<mass>0.19</mass>
<inertia>
<ixx>4.15e-6</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>2.407e-6</iyy>
<iyz>0</iyz>
<izz>2.407e-6</izz>
</inertia>
</inertial>
<visual name="visual">
<geometry>
<cylinder>
<radius>0.04</radius>
<length>0.05</length>
</cylinder>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Black</name>
</script>
</material>
</visual>
<collision name="collision">
<geometry>
<cylinder>
<radius>0.04</radius>
<length>0.05</length>
</cylinder>
</geometry>
</collision>
<sensor name="laser" type="ray">
<pose>0 0 0 0 0 0</pose>
<visualize>true</visualize>
<update_rate>10</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3.14159</min_angle>
<max_angle>3.14159</max_angle>
</horizontal>
</scan>
<range>
<min>0.2</min>
<max>12.0</max>
<resolution>0.05</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="laser_controller" filename="libgazebo_ros_laser.so">
<topicName>/laser/scan</topicName>
<frameName>rplidar_link</frameName>
</plugin>
</sensor>
</link>
</model>
</sdf>
创建模型配置文件:
nano ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/rplidar/model.config
填入以下内容:
<?xml version="1.0"?>
<model>
<name>RPLidar</name>
<version>1.0</version>
<sdf version="1.5">rplidar.sdf</sdf>
<description>
RPLidar A2 2D laser scanner
</description>
</model>
1.4 创建下视摄像头(FPV Cam)模型
nano ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/fpv_cam/fpv_cam.sdf
填入以下内容:
<?xml version="1.0" ?>
<sdf version="1.5">
<model name="fpv_cam">
<pose>0 0 0.05 0 0 0</pose>
<link name="link">
<inertial>
<mass>0.015</mass>
<inertia>
<ixx>1e-05</ixx>
<iyy>1e-05</iyy>
<izz>1e-05</izz>
</inertia>
</inertial>
<collision name="collision">
<geometry>
<cylinder>
<radius>0.025</radius>
<length>0.025</length>
</cylinder>
</geometry>
</collision>
<visual name="visual">
<geometry>
<cylinder>
<radius>0.025</radius>
<length>0.025</length>
</cylinder>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Blue</name>
</script>
</material>
</visual>
<sensor name="camera" type="camera">
<camera>
<horizontal_fov>2.0</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>100</far>
</clip>
</camera>
<always_on>1</always_on>
<update_rate>30</update_rate>
<visualize>true</visualize>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>30.0</updateRate>
<cameraName>fpv_cam</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>fpv_cam_link</frameName>
</plugin>
</sensor>
</link>
</model>
</sdf>
创建模型配置文件:
nano ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/fpv_cam/model.config
填入以下内容:
<?xml version="1.0"?>
<model>
<name>FPV Camera</name>
<version>1.0</version>
<sdf version="1.5">fpv_cam.sdf</sdf>
<description>
A simple FPV camera
</description>
</model>
1.5 创建集成无人机模型
nano ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/iris_fusion/iris_fusion.sdf
填入以下内容:
<?xml version='1.0'?>
<sdf version='1.5'>
<model name='iris_fusion'>
<include>
<uri>model://iris</uri>
</include>
<!-- 双目相机 -->
<include>
<uri>model://kinect_self</uri>
<pose>0.1 0 0 0 0 0</pose>
</include>
<joint name="kinect_self_joint" type="fixed">
<child>kinect_self::link</child>
<parent>iris::base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<upper>0</upper>
<lower>0</lower>
</limit>
</axis>
</joint>
<!-- 激光雷达 -->
<include>
<uri>model://rplidar</uri>
<pose>0 0 0.1 0 0 0</pose>
</include>
<joint name="rplidar_joint" type="fixed">
<child>rplidar::link</child>
<parent>iris::base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<upper>0</upper>
<lower>0</lower>
</limit>
</axis>
</joint>
<!-- 下视摄像头 -->
<include>
<uri>model://fpv_cam</uri>
<pose>0 0 0 0 1.57 0</pose>
</include>
<joint name="fpv_cam_joint" type="fixed">
<child>fpv_cam::link</child>
<parent>iris::base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<upper>0</upper>
<lower>0</lower>
</limit>
</axis>
</joint>
</model>
</sdf>
创建模型配置文件:
nano ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/iris_fusion/model.config
填入以下内容:
<?xml version="1.0"?>
<model>
<name>Iris with Sensors</name>
<version>1.0</version>
<sdf version='1.5'>iris_fusion.sdf</sdf>
<description>
This is a model of the Iris quadrotor with added sensors: Kinect, RPLidar and FPV camera.
</description>
</model>
2. 修改启动文件
2.1 创建自定义启动文件
创建一个自定义启动文件,以免修改原始文件:
cp ~/PX4-Autopilot/launch/mavros_posix_sitl.launch ~/PX4-Autopilot/launch/mavros_posix_sitl_sensors.launch
2.2 编辑自定义启动文件
nano ~/PX4-Autopilot/launch/mavros_posix_sitl_sensors.launch
修改文件内容:
<?xml version="1.0"?>
<launch>
<!-- MAVROS posix SITL environment launch script -->
<!-- launches MAVROS, PX4 SITL, Gazebo environment, and spawns vehicle -->
<!-- vehicle pose -->
<arg name="x" default="0"/>
<arg name="y" default="0"/>
<arg name="z" default="0"/>
<arg name="R" default="0"/>
<arg name="P" default="0"/>
<arg name="Y" default="0"/>
<!-- vehicle model and world -->
<arg name="est" default="ekf2"/>
<arg name="vehicle" default="iris"/>
<arg name="my_model" default="iris_fusion"/>
<arg name="world" default="$(find mavlink_sitl_gazebo)/worlds/empty.world"/>
<arg name="sdf" default="$(find mavlink_sitl_gazebo)/models/$(arg my_model)/$(arg my_model).sdf"/>
<!-- gazebo configs -->
<arg name="gui" default="true"/>
<arg name="debug" default="false"/>
<arg name="verbose" default="false"/>
<arg name="paused" default="false"/>
<arg name="respawn_gazebo" default="false"/>
<!-- MAVROS configs -->
<arg name="fcu_url" default="udp://:14540@localhost:14557"/>
<arg name="respawn_mavros" default="false"/>
<!-- PX4 configs -->
<arg name="interactive" default="true"/>
<!-- PX4 SITL and Gazebo -->
<include file="$(find px4)/launch/posix_sitl.launch">
<arg name="x" value="$(arg x)"/>
<arg name="y" value="$(arg y)"/>
<arg name="z" value="$(arg z)"/>
<arg name="R" value="$(arg R)"/>
<arg name="P" value="$(arg P)"/>
<arg name="Y" value="$(arg Y)"/>
<arg name="world" value="$(arg world)"/>
<arg name="vehicle" value="$(arg vehicle)"/>
<arg name="sdf" value="$(arg sdf)"/>
<arg name="gui" value="$(arg gui)"/>
<arg name="interactive" value="$(arg interactive)"/>
<arg name="debug" value="$(arg debug)"/>
<arg name="verbose" value="$(arg verbose)"/>
<arg name="paused" value="$(arg paused)"/>
<arg name="respawn_gazebo" value="$(arg respawn_gazebo)"/>
</include>
<!-- MAVROS -->
<include file="$(find mavros)/launch/px4.launch">
<!-- GCS link is provided by SITL -->
<arg name="gcs_url" value=""/>
<arg name="fcu_url" value="$(arg fcu_url)"/>
<arg name="respawn_mavros" value="$(arg respawn_mavros)"/>
</include>
</launch>
3. 创建启动脚本
为了方便启动,创建一个简单的启动脚本:
nano ~/start_px4_sensors.sh
填入以下内容:
#!/bin/bash
# 设置环境变量
source ~/PX4-Autopilot/Tools/simulation/gazebo-classic/setup_gazebo.bash ~/PX4-Autopilot ~/PX4-Autopilot/build/px4_sitl_default
# 设置ROS包路径
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilot:~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic
# 创建临时链接以兼容旧的路径引用
if [ ! -d ~/PX4-Autopilot/Tools/mavlink_sitl_gazebo ]; then
mkdir -p ~/PX4-Autopilot/Tools/mavlink_sitl_gazebo
ln -s ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/worlds ~/PX4-Autopilot/Tools/mavlink_sitl_gazebo/worlds
ln -s ~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models ~/PX4-Autopilot/Tools/mavlink_sitl_gazebo/models
fi
# 启动仿真
roslaunch ~/PX4-Autopilot/launch/mavros_posix_sitl_sensors.launch
给脚本添加执行权限:
chmod +x ~/start_px4_sensors.sh
4. 运行仿真
~/start_px4_sensors.sh
5. 验证传感器数据
当仿真运行后,您可以通过以下命令检查传感器数据:
5.1 查看可用的话题
rostopic list
5.2 查看激光雷达数据
rostopic echo /laser/scan
5.3 查看前置相机(Kinect)图像
rosrun image_view image_view image:=/camera/color/image_raw

5.4 查看下视摄像头图像
rosrun image_view image_view image:=/fpv_cam/image_raw
5.5 查看点云数据
rosrun image_view image_view image:=/camera/depth/image_raw
欢迎加入西安开发者社区!我们致力于为西安地区的开发者提供学习、合作和成长的机会。参与我们的活动,与专家分享最新技术趋势,解决挑战,探索创新。加入我们,共同打造技术社区!
更多推荐

 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)