解释强化学习中的batch, epoch, episode有什么区别与联系,分别有什么作用
在强化学习(Reinforcement Learning, RL)中,、 和是几个关键概念,它们各自有不同的含义和作用。下面是对这三个概念的详细解释及其区别与联系:定义:作用:示例:定义:作用:示例:定义:作用:示例:层次不同:用途不同:定义方式不同:共同目标:相互依赖:动态关系:、 和在强化学习中扮演着不同的角色,但它们之间又存在紧密的联系,共同推动着强化学习算法的学习过程。

强化学习中的batch, epoch, episode
在强化学习(Reinforcement Learning, RL)中,batch、epoch 和 episode 是几个关键概念,它们各自有不同的含义和作用。下面是对这三个概念的详细解释及其区别与联系:
1.Batch
定义:
- Batch 通常指的是从经验缓冲区(Experience Replay Buffer)中随机抽取的一组样本。这些样本用于更新模型参数。
作用:
- 提高训练效率:通过批量处理数据,可以利用矩阵运算加速梯度计算,从而提高训练速度。
- 减少过拟合:使用小批次数据进行更新可以帮助模型更好地泛化,避免对单一数据点的过度拟合。
示例:
- 假设有一个包含1000条经验的数据集,每次从中随机抽取32条经验组成一个 batch,然后用这个 batch 更新一次模型参数。会出现最后一个batch 不足设定batch的数目的情况
1.1 最后一个batch不足32该怎么处理?
- 通常选择丢弃不完整batch或填充不完整batch
在强化学习中,当经验缓冲区中的数据不足以组成一个完整的 batch 时,通常有两种常见的处理方式:
- 丢弃最后一个不完整的 batch:这种做法简单直接,但可能会浪费一些数据。
- 填充最后一个 batch:通过循环利用经验缓冲区中的数据来填充最后一个不完整的 batch。
下面我将分别介绍这两种方法,并提供相应的代码示例。
1.1.1 方法一:丢弃最后一个不完整的 batch
这种方法比较简单,直接忽略最后一个不完整的 batch。适用于对数据利用率要求不高且希望保持简单逻辑的情况。
import numpy as np
# 假设有一个包含1000条经验的数据集
experience_buffer = np.random.rand(1000, 5) # 每条经验有5个特征
batch_size = 32
num_batches = len(experience_buffer) // batch_size # 整除得到完整batch的数量
for i in range(num_batches):
batch = experience_buffer[i * batch_size:(i + 1) * batch_size]
# 使用这个 batch 更新模型参数
print(f"Batch {i+1}: {batch.shape}")
print(f"Total batches processed: {num_batches}")
在这个例子中,我们只处理了前 992 条经验(即 31 个完整的 batch),最后的 8 条经验被忽略了。
1.1.2 方法二:填充最后一个不完整的 batch
这种方法通过循环利用经验缓冲区中的数据来填充最后一个不完整的 batch。适用于需要充分利用所有数据的情况。
import numpy as np
# 假设有一个包含1000条经验的数据集
experience_buffer = np.random.rand(1000, 5) # 每条经验有5个特征
batch_size = 32
total_samples = len(experience_buffer)
num_full_batches = total_samples // batch_size
remaining_samples = total_samples % batch_size
# 处理所有完整的 batch
for i in range(num_full_batches):
batch = experience_buffer[i * batch_size:(i + 1) * batch_size]
# 使用这个 batch 更新模型参数
print(f"Full Batch {i+1}: {batch.shape}")
# 处理最后一个不完整的 batch
if remaining_samples > 0:
last_batch = experience_buffer[num_full_batches * batch_size:]
# 计算需要填充的样本数量
padding_needed = batch_size - remaining_samples
# 随机选择一些样本进行填充
padding_indices = np.random.choice(total_samples, padding_needed, replace=False)
padded_last_batch = np.concatenate((last_batch, experience_buffer[padding_indices]))
# 使用填充后的 batch 更新模型参数
print(f"Padded Last Batch: {padded_last_batch.shape}")
在这个例子中:
- 我们首先处理了前
992条经验(即31个完整的 batch)。 - 然后处理剩下的
8条经验,并从经验缓冲区中随机选择24条经验进行填充,使得最后一个 batch 也达到32条经验。
1.1.3 选择哪种方法?
- 丢弃最后一个不完整的 batch:适用于对数据利用率要求不高且希望简化代码逻辑的情况。
- 填充最后一个不完整的 batch:适用于需要充分利用所有数据且愿意稍微增加一点复杂度的情况。
你可以根据具体需求选择合适的方法。通常情况下,填充最后一个不完整的 batch 是更为常见和推荐的做法,因为它能更好地利用所有可用的数据。
2.Epoch
定义:
- Epoch 在监督学习中通常指遍历整个训练数据集一次的过程。但在强化学习中,由于数据是动态生成的,因此 epoch 的定义不太一样。
- 在强化学习中,epoch 可以理解为完成一定数量 episode 后的一个周期。 例如,每完成10个 episode 认为是一个 epoch。
作用:
- 监控训练进度:通过记录每个 epoch 的性能指标(如平均奖励),可以监控模型的训练进展。
- 调整超参数:根据 epoch 结束时的性能表现,可以调整学习率等超参数。
示例:
- 完成10个 episode 后认为是一个 epoch,并记录该 epoch 的平均奖励。
3.Episode
定义:
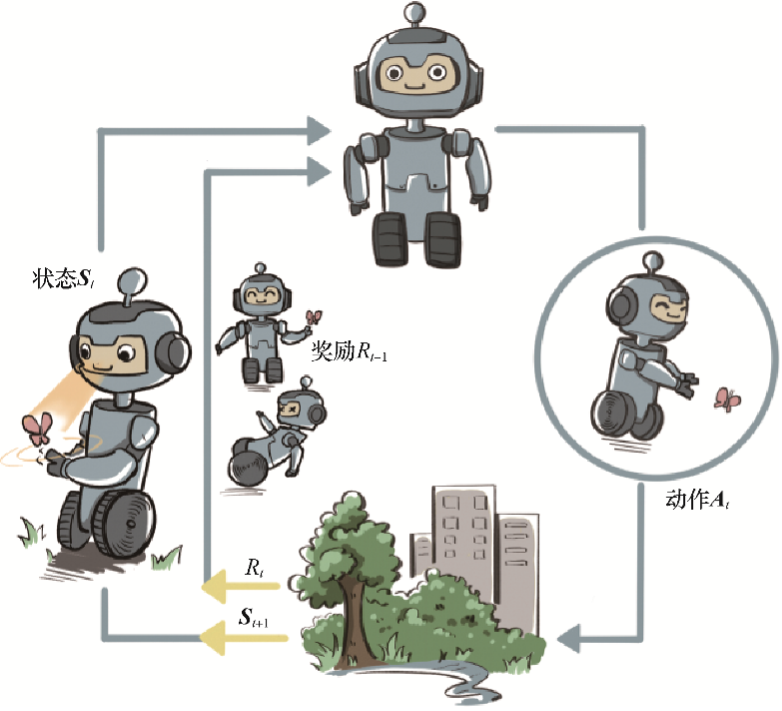
- Episode 表示智能体在一个环境中从开始到结束的一次完整的交互过程。即从初始状态开始,经过一系列动作后到达终止状态。
作用:
- 收集经验:每个 episode 收集的经验会被存储在经验缓冲区中,供后续训练使用。
- 评估策略:通过对单个 episode 的奖励进行统计,可以评估当前策略的表现。
示例:
- 智能体玩一场游戏从头到尾算作一个 episode,记录该 episode 中获得的总奖励。
4.区别与联系
4.1 区别
-
层次不同:
- Episode 是最基础的时间单位,表示一次完整的交互过程。
- Epoch 是多个 episode 的集合,通常用于监控训练进度。
- Batch 是从经验缓冲区中抽取的一部分数据,用于更新模型参数。
-
用途不同:
- Episode 主要用于收集经验和评估策略。
- Epoch 主要用于监控训练进度和调整超参数。
- Batch 主要用于高效地更新模型参数。
-
定义方式不同:
- Episode 根据环境的终止条件自然形成。
- Epoch 可以自定义,通常是多个 episode 的组合。
- Batch 是从经验缓冲区中随机抽取的数据子集。
4.2 联系
-
共同目标:
- 这三个概念最终都服务于强化学习的核心目标:训练出高性能的策略。
-
相互依赖:
- Episode 提供了经验,这些经验被存储在经验缓冲区中。
- Batch 从经验缓冲区中提取数据,用于更新模型参数。
- Epoch 则根据多个 episode 的结果来监控训练进程和调整策略。
-
动态关系:
- 随着训练的进行,新的 episode 不断产生,这些 episode 的经验被不断加入经验缓冲区。
- 从经验缓冲区中抽取的 batch 会不断地用来更新模型参数。
- 多个 episode 的结果汇总起来形成了一个 epoch,帮助我们了解模型的训练情况。
batch、epoch 和 episode 在强化学习中扮演着不同的角色,但它们之间又存在紧密的联系,共同推动着强化学习算法的学习过程。
batch 可以是采样一定数量(batch值)的episode
一个epoch 可以是完成多个 episode
Episode 是最基础的时间单位,表示一次完整的交互过程。
Epoch 是 episode 的集合,用于监控训练进度和调整超参数。
Batch 是从经验缓冲区中随机抽取的一部分数据,用于更新模型参数。
三者之间的关系层级
Epoch
├── Episode 1
│ ├── Experience 1
│ ├── Experience 2
│ └── ...
├── Episode 2
│ ├── Experience 1
│ ├── Experience 2
│ └── ...
└── ...
└── Episode N
├── Experience 1
├── Experience 2
└── ...
Experience Buffer (所有 episode 的经验数据)
Batch 1 (从 Experience Buffer 中随机抽取)
Batch 2 (从 Experience Buffer 中随机抽取)
...
Batch M (从 Experience Buffer 中随机抽取, 可能不足 batch_size)
理解 batch、epoch 和 episode 之间的关系确实需要一些细致的区分,但它们在强化学习中的确存在一定的层级关系和相互作用。让我们逐步澄清这些概念及其相互关系。
- Episode 是基础单位:每个 episode 表示一次完整的交互过程,收集经验数据。
- Epoch 是 episode 的集合:多个 episode 构成一个 epoch,用于监控和调整训练过程。
- Batch 是经验的子集:从经验缓冲区中随机抽取的部分数据,用于更新模型参数。
4.3 具体关系
-
Episode 和 Epoch:
- 关系:多个 episode 组合成一个 epoch。
- 示例:如果每完成10个 episode 认为是一个 epoch,则第1到第10个 episode 构成第一个 epoch,第11到第20个 episode 构成第二个 epoch,依此类推。
-
Batch 和 Episode:
- 关系:一个 batch 可能包含来自多个 episode 的经验数据。
- 示例:假设每个 episode 收集了10条经验数据,而 batch 大小为32。那么一个 batch 可能包含来自3个 episode 的经验数据(30条 + 部分第4个 episode 的经验数据)。
-
Batch 和 Epoch:
- 关系:一个 epoch 内可以包含多个 batch,具体取决于经验缓冲区的大小和 batch 大小。
- 示例:如果一个 epoch 包含100条经验数据,而 batch 大小为32,则该 epoch 可以包含3个完整 batch 和一个不完整的 batch(100 = 3 * 32 + 4)。
4.4 示例说明
假设我们有一个强化学习任务,配置如下:
- 每个 episode 收集10条经验数据。
- 每个 epoch 包含10个 episode。
- Batch 大小为32。
4.4.1 Episode
- 第1个 episode 收集10条经验数据。
- 第2个 episode 收集10条经验数据。
- …
- 第10个 episode 收集10条经验数据。
4.4.2 Epoch
- 第1个 epoch 包含第1到第10个 episode 的经验数据,共100条经验数据。
4.4.3 Batch
- 从第1个 epoch 的100条经验数据中随机抽取32条组成第一个 batch。
- 再从剩余的经验数据中随机抽取32条组成第二个 batch。
- 最后剩下的4条经验数据可以处理方式有:
- 丢弃:忽略这4条经验数据。
- 填充:从经验缓冲区中再随机选择28条经验数据进行填充,使得最后一个 batch 也达到32条经验数据。
4.5 总结
- Episode 是最基础的时间单位,表示一次完整的交互过程。
- Epoch 是 episode 的集合,用于监控训练进度和调整超参数。
- Batch 是从经验缓冲区中随机抽取的一部分数据,用于更新模型参数。
三者之间的关系可以用以下图示表示:
Epoch
├── Episode 1
│ ├── Experience 1
│ ├── Experience 2
│ └── ...
├── Episode 2
│ ├── Experience 1
│ ├── Experience 2
│ └── ...
└── ...
└── Episode N
├── Experience 1
├── Experience 2
└── ...
Experience Buffer (所有 episode 的经验数据)
Batch 1 (从 Experience Buffer 中随机抽取)
Batch 2 (从 Experience Buffer 中随机抽取)
...
Batch M (从 Experience Buffer 中随机抽取, 可能不足 batch_size)
通过这种方式,我们可以清晰地看到 batch、epoch 和 episode 之间的层级关系和相互作用。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐



 16
16 0
0- 0


 已为社区贡献8条内容
已为社区贡献8条内容










 服务器0元试用
服务器0元试用
所有评论(0)