
SLAM中用到的GTSAM是什么,如何构建和使用GTSAM
GTSAM (Georgia Tech Smoothing and Mapping library) 是一个开源C++库,用于解决机器人和自动驾驶车辆的定位与地图构建(SLAM)问题。它包含了一系列高效的算法,用于处理传感器数据和地图信息,以估计机器人或车辆的路径和周围环境。GTSAM 通过使用因子图和非线性优化技术,提供了一种灵活而强大的方式来表示和解决SLAM问题。
目录
GTSAM (Georgia Tech Smoothing and Mapping library) 是一个开源C++库,用于解决机器人和自动驾驶车辆的定位与地图构建(SLAM)问题。它包含了一系列高效的算法,用于处理传感器数据和地图信息,以估计机器人或车辆的路径和周围环境。GTSAM 通过使用因子图和非线性优化技术,提供了一种灵活而强大的方式来表示和解决SLAM问题。
几个关键原理:
1. 因子图:
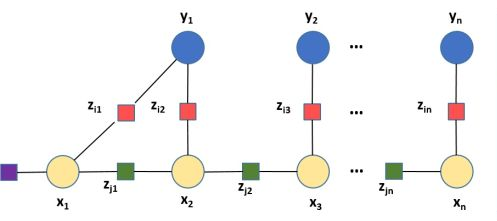
GTSAM使用因子图作为其核心数据结构。因子图是一种概率图模型,它以图形方式表示变量之间的条件依赖关系。在SLAM问题中,这些变量通常是机器人的姿态和地图特征的位置。
2. 非线性优化:
GTSAM利用非线性优化技术来求解因子图。优化的目标是找到一组变量值(例如,机器人的轨迹和地图中的地标位置),这些值最能够符合因子图中所有因子的约束。
3. 平滑和映射:
GTSAM不仅关注当前的传感器测量(即过滤),而且还可以利用历史数据来改进先前状态的估计(即平滑)。这对于构建精确的地图和估计机器人的轨迹尤为重要。
4. 概率建模:
GTSAM使用概率模型来处理传感器的不确定性和噪声。它支持多种噪声模型,允许用户根据实际情况选择最合适的模型。
5. 模块化和扩展性:
GTSAM的设计允许用户轻松添加新的因子类型,使其能够处理各种SLAM问题和传感器类型。
举例说明如何构建和使用GTSAM:
构建的步骤很简单,主要步骤分为三步:1. 构建因子图;2. 给定初值;3. 优化。
这个例子将包括以下几个步骤:
步骤 1: 安装 GTSAM
首先,你需要安装GTSAM。你可以从GTSAM的GitHub页面(https://github.com/borglab/gtsam)下载源代码,并按照说明进行编译和安装。
步骤 2: 包含头文件
在你的C++程序中,包含GTSAM的头文件:
#include <gtsam/slam/dataset.h>
#include <gtsam/nonlinear/NonlinearFactorGraph.h>
#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>
#include <gtsam/inference/Symbol.h>步骤 3: 创建因子图
因子图是GTSAM中表示问题的核心数据结构。创建一个因子图,你可以添加各种因子,例如里程计因子、传感器测量因子等。
gtsam::NonlinearFactorGraph graph;步骤 4: 添加因子
例如,添加一个二元因子来表示两个姿态之间的相对测量:
gtsam::Symbol x1('x', 1), x2('x', 2);
graph.emplace_shared<gtsam::BetweenFactor<gtsam::Pose2>>(x1, x2, 测量值, 噪声模型);步骤 5: 创建初始估计
为图中的每个变量提供一个初始估计值。
gtsam::Values initialEstimate;
initialEstimate.insert(x1, gtsam::Pose2(初始位置和姿态));
initialEstimate.insert(x2, gtsam::Pose2(初始位置和姿态));步骤 6: 优化
使用一个优化器来优化因子图,并得到最终的估计值。
gtsam::LevenbergMarquardtOptimizer optimizer(graph, initialEstimate);
gtsam::Values result = optimizer.optimize();步骤 7: 结果分析
最后,分析优化后的结果:
gtsam::Pose2 pose = result.at<gtsam::Pose2>(x1);
// 输出或分析pose这是例子,只展示了GTSAM的核心功能。GTSAM库提供了许多高级功能,比如回环检测、3D SLAM、因子图的可视化等,可以用来解决更复杂的SLAM问题。

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 16
16 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)