
Yalmip入门教程(5)-约束条件操作的相关函数
博客中所有内容均来源于自己学习过程中积累的经验以及对yalmip官方文档的翻译:https://yalmip.github.io/tutorials/这篇博客将详细介绍yalmip工具箱中约束条件操作相关函数的用法。
博客中所有内容均来源于自己学习过程中积累的经验以及对yalmip官方文档的翻译:https://yalmip.github.io/tutorials/
这篇博客将详细介绍yalmip工具箱中约束条件操作相关函数的用法。
1.约束条件操作的相关函数
1.1 boundingbox函数
boundingbox函数用于求出一组约束条件中所包含变量的上下限,即提取约束条件中变量的显式边界,使用语法如下:
[B,L,U] = boundingbox(Constraint,options,x)
其中,Constraint表示约束条件(必要输入),options表示Yalmip设置(可选输入),x表示需要提取边界的变量(可选输入),B为变量x的上下限约束,为lmi变量形式,L和U分别表示变量的上下限,均为矩阵形式(可选输出),下面是一个简单的示例:
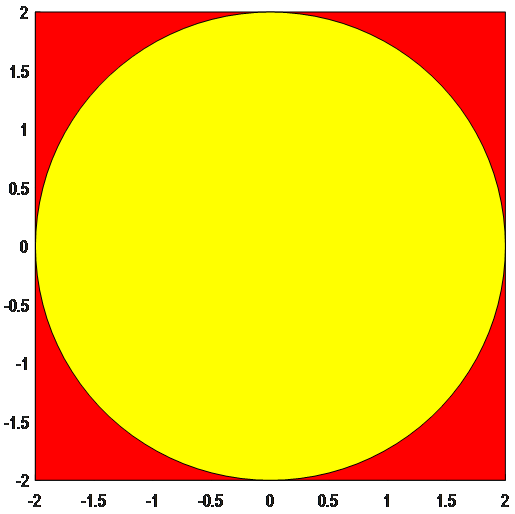
例1:使用boundingbox求出约束x²+y²<=4中变量的上下界,并画图展示
sdpvar x y
Ball = x^2+y^2 <= 4;
[Box,L,U] = boundingbox(Ball);
plot(Box,[x y]);
hold on
plot(Ball,[x y],'y')运行结果:
图1 boundingbox函数效果展示
L =
-2.0000
-2.0000
U =
2.0000
2.0000
光看上面的例子,可能很难体会到这个函数的作用,但其实这个函数在求解优化问题时是非常有用的。我们知道在求解优化问题的过程中,经常会有非线性项,需要用到大M法将其转为线性项,这时候如果可以确定变量的边界,将会非常有效地提高优化问题求解效率,下面进行举例说明:
例2:有1个0-1变量x和1个大于0的连续变量y相乘,使用大M法将其线性化。
引入大于0的连续辅助变量z=xy,可以使用变量z和3个辅助约束条件代替这个非线性项:
z≤Mx,z≤y,z≥y-M(1-x)
其中M是变量y的一个上界,下面分析一下两者是否等效:
1)当x=0时,由z=xy可得z=0,由z≤Mx和z≥0同样可得z=0,两者等效;
2)当x=1时,由z=xy可得z=y,由z≤Mx,z≤y,z≥y-M(1-x)可得z≤y且z≥y,即z=y,两者仍然等效。
但在实际使用时,M的取值不能太大也不能太小,如果M取值太大,可能会因为浮点数精度的问题造成约束的偏差,也扩大了约束的范围,降低求解效率;如果M取值太小,甚至小于变量y的上界,那可能会改变变量y的取值范围,甚至导致模型不可解(例如,变量y∈[0,100],M取了50,那么约束z≤Mx会将y的范围限制在[0,50]之间,改变了y的取值范围)。
因此,M最合适的取值就是y的上限,使用boundingbox函数可以方便的求出变量的上界,这就是其作用所在:求出变量的上界之后,如果Yalmip建模时用到了大M法,将会自动使用变量的上界进行等效转换。
1.2 chebyball函数
chebyball函数用于求解一组约束条件所限定的边界中最大的内切圆(如果有3个或以上的变量,就是内切球以及内切超球体),其基本语法如下:
[xc,r] = chebyball(Constraint,options)
其中,Constraint表示约束条件,options表示Yalmip选项,xc和r分别表示内切圆的圆心坐标和半径。举例说明如下:
例3:已知变量x和y满足约束0≤x≤1,0≤y≤1,画出该范围内最大的圆。
代码和运行结果如下:
sdpvar x y
Box = -1 <= [x y] <= 1;
[xc,r] = chebyball(Box);
plot(Box);
hold on
plot((x-xc(1))^2 + (y-xc(2))^2 <= r^2,[],'y')运行结果:

图2 chebyball函数效果展示
例3和例1正好正好是一个逆向过程。
1.3 check函数
check函数用在约束问题求解之后,用于检查约束条件的满足情况,其基本语法如下:
[pres,dres] = check(F)
其中,F表示约束条件,pres和dres分别表示原始约束和对偶约束的残差,残差即为约束实际取值和约束条件边界的偏差值,当约束条件满足时,残差为正数,当约束条件不满足时,残差为负数(具体理论不做介绍,可以使用help check或者自行查找相关理论),举例说明如下:
例4:
sdpvar x
F0 = [x == 1];
F1 = [x == 1.25];
F2 = [0.9 <= x <= 1.2];
F3 = [x >= 2];
optimize(F0);
[pres1,dres1] = check(F1);
[pres2,dres2] = check(F2);
[pres3,dres3] = check(F3);
pres1
pres2
pres3运行结果:
pres1 =
-0.250
pres2 =
0.1000
pres3 =
-1
x实际取值为1,约束条件F1不满足,所以残差为负数,取值为-0.25,约束条件F2满足,所以残差为正数,取值为0.1,约束条件F3不满足,所以残差为负数,取值为-1。在调试代码时check函数可以发挥很大作用。
1.4 dual函数
dual函数用于求出与约束条件相应的对偶变量,其语法如下:
Z = dual(F)
其中,F表示约束条件,Z表示其对偶变量的取值。由于该方法是直接获取对偶变量的取值,所以一般都需要优化问题求解成功后才可以使用。首先来看官方文档给出的例子,学习一下dual函数的用法。
例5:求解优化问题后,使用dual函数提取约束条件对应的对偶变量。
A = [-1 2;-3 -4];
P = sdpvar(2,2);
F = [P >= 0, A'*P+P*A <= 0, trace(P) == 1];
optimize(F);
Z2 = dual(F(2));运行结果:
Z2 =
1.0e-09 *
0.8605 -0.1947
-0.1947 0.0440
求解优化问题后,使用dual函数就可以求出某个约束条件对应的对偶变量取值。由线性规划的理论可知,如果原问题具有最优解,那么当原问题取得最优解时,其对偶问题也取得最优解,且两个问题的最优目标函数相同,我们用一个例子来验证:
例6:已知一个线性规划的原问题和对偶问题,使用dual函数验证强对偶定理(即原问题的最优解和对偶问题的最优解相同)
原问题为:
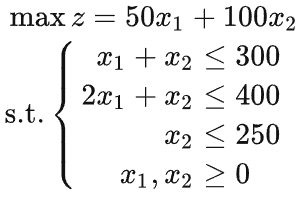
对偶问题为:

matlab代码和运行结果:
sdpvar x1 x2
z = 50*x1 + 100*x2;
F = [ x1 + x2 <= 300 , ...
2*x1 + x2 <= 400 , ...
x2 <= 500 , x1 >= 0 , x2 >= 0];
optimize(F , -z)
y = dual(F(1:3))
z = value(z)
w = [300 400 250]*y运行结果:
y =
100
0
0
z =
30000
w =
30000
由结果可知,原问题和对偶问题的最优解相等,满足强对偶定理。
1.5 hull函数
hull函数用于求出一组约束条件的凸包(convex hull,此处不再做理论介绍,只介绍用法),标准语法如下:
F = hull(F1,F2,...)
其中F1,F2...表示原始的约束条件,F表示这组约束条件的凸包,官方文档中用图形直观地展示了这个函数的作用:
例7:
sdpvar x y
F1 = [-1 <= x <= 1, -1 <= y <= 1];
F2 = [-1.5 <= x-y <= 1.5, -1.5 <= x+y <= 1.5];
H = hull(F1,F2);
plot(H);hold on
plot(F2);
plot(F1);运行结果: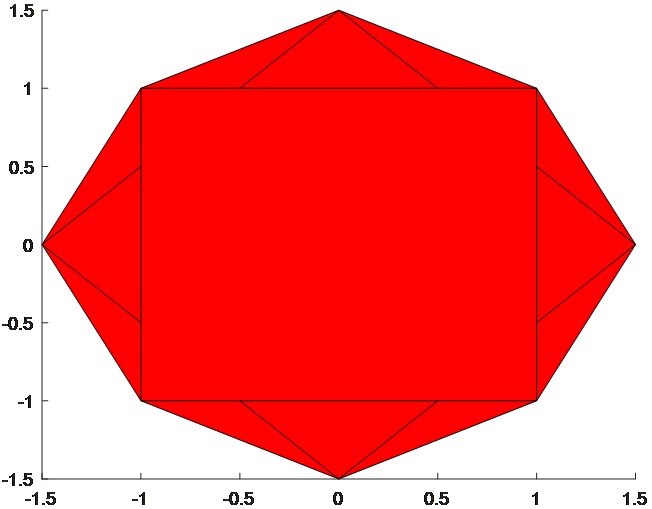
图3 约束条件和相应的convex hull
1.6 vertex函数
(该函数仅最新版yalmip才有,如果没有去官网下载最新版即可)vertex函数用于求出一组约束的顶点,其标准语法如下:
V = vertex(Constraint,[x])
其中,Constraint表示约束条件,x表示决策变量,V表示顶点坐标,举例说明如下:
例8:
二维空间:
x = sdpvar(2,1);
B = [-1 <= x <= 1, sum(x) <= 3/2];
clf
plot(B,[],[],[],sdpsettings('plot.shade',0.1));
hold on;grid on
v = vertex(B,x);
m = plot(v(1,:),v(2,:),'bo');
set(m,'Markersize',10);
set(m,'Markerface','yellow');三维空间:
x = sdpvar(3,1);
P = [-1 <= x <= 1, sum(abs(x)) <= 1,sum(x)>=.5]
clf
plot(P,x,[],[],sdpsettings('plot.shade',0.1));
hold on;grid on
v = vertex(P,x);
m = plot3(v(1,:),v(2,:),v(3,:),'bo');
set(m,'Markersize',10);
set(m,'Markerface','yellow');运行结果为:

图4 二维约束的顶点

图5 三维约束的顶点
2.调试小技巧,给约束命名
当所求优化问题比较复杂时,有的时候很难记住每个约束在对应的约束变量中是第几个位置,调试代码时很不方便,这时候可以使用一个:加上一个字符串,就可以给约束命名,用于在约束变量中打上标记。例如:
sdpvar x
Constraints = [(x >= 0):'Positivity',(x <= 1):'Bounded']运行结果:

当需要用到某个约束时,还可以用对应的’Tag’来索引,例如:
sdpvar x
Constraints = [(x >= 0):'Positivity',(x <= 1):'Bounded'];
Constraints('Bounded')运行结果:

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 6
6 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)