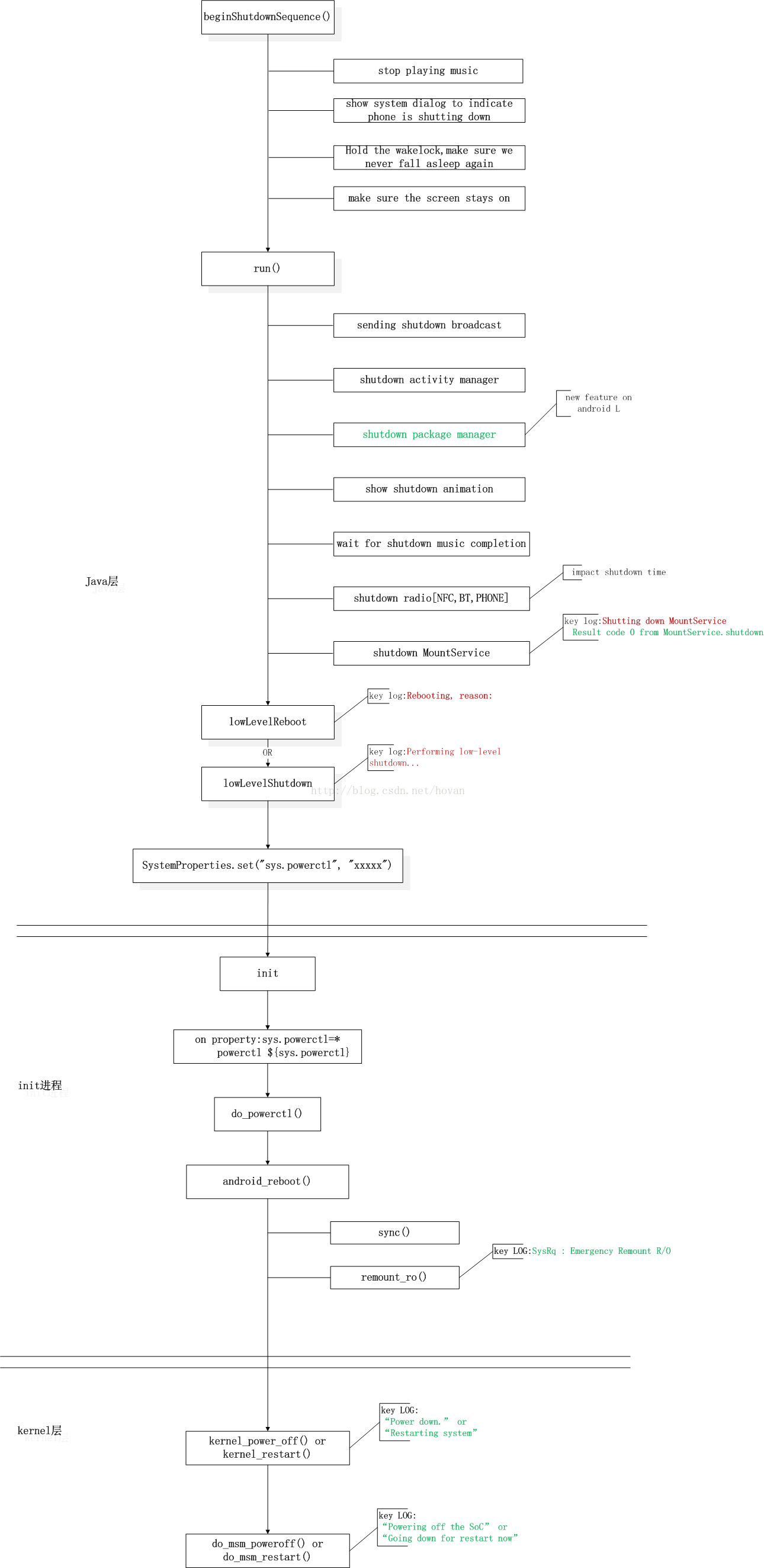
android L 关机流程图
do_msm_poweroff()与do_msm_restart()都设置了dload,PMIC,唯一不同的是do_msm_restart()里多了一个__raw_writel的动作,即reason写入IMEM,目的在于重启进入sbl1时判断应该进入那种模式,如我们开发用的bootloader模式,恢复出厂设置的recovery模式等。//也是用bootanim进程,跟开关动画一样的方式。
下面是简单的流程图,从java到kernel层。
ShutdownThread.java文件
stop playing music,因为后面可能要playing shutdown music.
代码如下:
private static void beginShutdownSequence(Context context) {
....
//acquire audio focus to make the other apps to stop playing muisc
mAudioManager = (AudioManager) context.getSystemService(Context.AUDIO_SERVICE);
mAudioManager.requestAudioFocus(null,
AudioManager.STREAM_MUSIC, AudioManager.AUDIOFOCUS_GAIN);
show system dialog to indicate phone is shutting down,如果没有关机动画的话,要show一个关机提示出来。
代码如下:
if (!checkAnimationFileExist()) {
// throw up an indeterminate system dialog to indicate radio is
// shutting down.
ProgressDialog pd = new ProgressDialog(context);
pd.setTitle(context.getText(com.android.internal.R.string.power_off));
pd.setMessage(context.getText(com.android.internal.R.string.shutdown_progress));
pd.setIndeterminate(true);
pd.setCancelable(false);
pd.getWindow().setType(WindowManager.LayoutParams.TYPE_KEYGUARD_DIALOG);
pd.show();
}
Hold the wakelock,make sure we never fall asleep again,抓锁防止机器关机过程中休眠
代码如下:
sInstance.mCpuWakeLock = sInstance.mPowerManager.newWakeLock(
PowerManager.PARTIAL_WAKE_LOCK, TAG + "-cpu");//这个只是锁住cpu不进入休眠,但screen是off的,需full锁来保证screen常亮
sInstance.mCpuWakeLock.setReferenceCounted(false);
sInstance.mCpuWakeLock.acquire();
make sure the screen stays on,再抓一个full锁,防止屏幕半暗
代码如下:
sInstance.mScreenWakeLock = sInstance.mPowerManager.newWakeLock(
PowerManager.FULL_WAKE_LOCK, TAG + "-screen");//保持srceen常亮
sInstance.mScreenWakeLock.setReferenceCounted(false);
sInstance.mScreenWakeLock.acquire();
起一下新进程
sending shutdown broadcast,发出广播,通知各app该保存数据赶紧的,我要关机了
代码如下:
Intent intent = new Intent(Intent.ACTION_SHUTDOWN);
intent.addFlags(Intent.FLAG_RECEIVER_FOREGROUND);
mContext.sendOrderedBroadcastAsUser(intent,//发广播
UserHandle.ALL, null, br, mHandler, 0, null, null);
shutdown activity manager,关闭activity manager,即关闭AppOpsService,UsageStatsService,BatteryStatsService
注意:android L 与KK在关闭UsageStatsService上有所区别
代码如下:
[ActivityManagerService.java]
final IActivityManager am =
ActivityManagerNative.asInterface(ServiceManager.checkService("activity"));
if (am != null) {
try {
am.shutdown(MAX_BROADCAST_TIME);
} catch (RemoteException e) {
}
}
shutdown package manager,保存app使用时间到 disk里,这是android L新增的功能。
代码如下:
[PackageManagerService.java]
final PackageManagerService pm = (PackageManagerService)
ServiceManager.getService("package");
if (pm != null) {
pm.shutdown();
}
show shutdown animation,播放关机动画了
代码如下:
private static void showShutdownAnimation() {
/*
* When boot completed, "service.bootanim.exit" property is set to 1.
* Bootanimation checks this property to stop showing the boot animation.
* Since we use the same code for shutdown animation, we
* need to reset this property to 0. If this is not set to 0 then shutdown
* will stop and exit after displaying the first frame of the animation
*/
SystemProperties.set("service.bootanim.exit", "0");
SystemProperties.set("ctl.start", "bootanim");//也是用bootanim进程,跟开关动画一样的方式。
}
shutdown radio[NFC,BT,MODEM],注意这里关闭modem这块与andorid KK的不一样。
代码如下:
shutdownRadios(MAX_RADIO_WAIT_TIME);
shutdown MountService,特别这里会导致关机失败。
代码如下:
// Set initial variables and time out time.
mActionDone = false;
final long endShutTime = SystemClock.elapsedRealtime() + MAX_SHUTDOWN_WAIT_TIME;
synchronized (mActionDoneSync) {
try {
final IMountService mount = IMountService.Stub.asInterface(
ServiceManager.checkService("mount"));
if (mount != null) {
mount.shutdown(observer);
} else {
Log.w(TAG, "MountService unavailable for shutdown");
}
} catch (Exception e) {
Log.e(TAG, "Exception during MountService shutdown", e);
}
while (!mActionDone) {
long delay = endShutTime - SystemClock.elapsedRealtime();
if (delay <= 0) {
Log.w(TAG, "Shutdown wait timed out");
break;
}
try {
mActionDoneSync.wait(delay);
} catch (InterruptedException e) {
}
}
}
走完上层关机流程,下面就要执行关机动作了。
代码如下:
public static void rebootOrShutdown(boolean reboot, String reason) {
deviceRebootOrShutdown(reboot, reason);
if (reboot) {
Log.i(TAG, "Rebooting, reason: " + reason);
PowerManagerService.lowLevelReboot(reason);//重启
Log.e(TAG, "Reboot failed, will attempt shutdown instead");
} else if (SHUTDOWN_VIBRATE_MS > 0) {
// vibrate before shutting down
Vibrator vibrator = new SystemVibrator();
try {
vibrator.vibrate(SHUTDOWN_VIBRATE_MS, VIBRATION_ATTRIBUTES);
} catch (Exception e) {
// Failure to vibrate shouldn't interrupt shutdown. Just log it.
Log.w(TAG, "Failed to vibrate during shutdown.", e);
}
// vibrator is asynchronous so we need to wait to avoid shutting down too soon.
try {
Thread.sleep(SHUTDOWN_VIBRATE_MS);
} catch (InterruptedException unused) {
}
}
// Shutdown power
Log.i(TAG, "Performing low-level shutdown...");
PowerManagerService.lowLevelShutdown();//关机
}
从代码上看始终会走到lowLevelShutdown(),但如果是重启就不会,lowLevelReboot()就停止了。
lowLevelShutdown()与lowLevelReboot()都在PowerManagerService.java实现,其实都只是设置一个属性:SystemProperties.set("sys.powerctl", "xxx");
正是这个动作触发关机流程往下走,这涉及到init进程的4大功能,请参考我的另一篇文章Android的init进程
sys.powerctl属性触发开关在init.rc定义
on property:sys.powerctl=*
powerctl ${sys.powerctl}
我们来解读这句话,on property:sys.powerctl=*表示当属性sys.powerctl设置为任何值是都会跑到这里,触发动作是powerctl ${sys.powerctl},这个动作的意思是调用powerctl指令,并把sys.powerctl的值传给它。powerctl指令在init进程会执行。
从下面的表可知,powerctl对应的操作是do_powerctl
[system/core/init/keywords.h]
KEYWORD(powerctl, COMMAND, 1, do_powerctl)
do_powerctl的实现
代码如下:
[system/core/init/builtins.c]
int do_powerctl(int nargs, char **args)
{
....
return android_reboot(cmd, 0, reboot_target);
}
它调用android_reboot()函数,实现如下:
[system/core/libcutils/android_reboot.c]
int android_reboot(int cmd, int flags UNUSED, char *arg)
{
int ret;
sync();
remount_ro();
switch (cmd) {
case ANDROID_RB_RESTART:
ret = reboot(RB_AUTOBOOT);
break;
case ANDROID_RB_POWEROFF:
ret = reboot(RB_POWER_OFF);
break;
case ANDROID_RB_RESTART2:
ret = syscall(__NR_reboot, LINUX_REBOOT_MAGIC1, LINUX_REBOOT_MAGIC2,
LINUX_REBOOT_CMD_RESTART2, arg);
break;
default:
ret = -1;
}
return ret;
}
从这里看出它的主要工作:
sync() 回写block设备的内容,这是阻塞型操作。
remount_ro() 把block设备remount成ro,这里有个关键LOG:SysRq : Emergency Remount R/O,这是在logkit所能看到的最后一句LOG,因为remount成ro了,后面的LOG要通过last kmsg技术导出来。
reboot()或者syscall(__NR_reboot....,这点与android KK不同,这边直接用syscall功能,KK则通过汇编。
后面syscall(__NR_reboot...知道,直接调用了linux的__NR_reboot系统调用,这个系统调用会跑哪里?后面会讲。
reboot()这个函数实现如下:
[bionic/libc/bionic/reboot.cpp]
int reboot(int mode) {
return __reboot(LINUX_REBOOT_MAGIC1, LINUX_REBOOT_MAGIC2, mode, NULL);
}
调用了__reboot,它在汇编实现 如下:
[bionic/libc/arch-arm/syscalls/__reboot.S]
ENTRY(__reboot)
mov ip, r7
ldr r7, =__NR_reboot//也跑到__NR_reboot系统调用
swi #0
mov r7, ip
cmn r0, #(MAX_ERRNO + 1)
bxls lr
neg r0, r0
b __set_errno_internal
END(__reboot)
__NR_reboot对应的内核入口在哪里?
如下:
[bionic/libc/kernel/uapi/asm-generic/unistd.h]
#define __NR_reboot 142
它在内核入口如下:
注:bionic/libc/kernel/uapi/asm-generic/unistd.h与kernel/include/uapi/asm-generic/unistd.h是对应的,方便以后代码追踪
[kernel/include/uapi/asm-generic/unistd.h]
#define __NR_reboot 142
__SYSCALL(__NR_reboot, sys_reboot)
__NR_reboot 映射到 sys_reboot
grep 下sys_reboot 找不到,其实在这里
用SYSCALL_DEFINE定义
[kernel/kernel/sys.c]
SYSCALL_DEFINE4(reboot, int, magic1, int, magic2, unsigned int, cmd,
void __user *, arg)
{
struct pid_namespace *pid_ns = task_active_pid_ns(current);
char buffer[256];
int ret = 0;
/* We only trust the superuser with rebooting the system. */
if (!ns_capable(pid_ns->user_ns, CAP_SYS_BOOT))
return -EPERM;
/* For safety, we require "magic" arguments. */
if (magic1 != LINUX_REBOOT_MAGIC1 ||
(magic2 != LINUX_REBOOT_MAGIC2 &&
magic2 != LINUX_REBOOT_MAGIC2A &&
magic2 != LINUX_REBOOT_MAGIC2B &&
magic2 != LINUX_REBOOT_MAGIC2C))
return -EINVAL;
/*
* If pid namespaces are enabled and the current task is in a child
* pid_namespace, the command is handled by reboot_pid_ns() which will
* call do_exit().
*/
ret = reboot_pid_ns(pid_ns, cmd);
if (ret)
return ret;
/* Instead of trying to make the power_off code look like
* halt when pm_power_off is not set do it the easy way.
*/
if ((cmd == LINUX_REBOOT_CMD_POWER_OFF) && !pm_power_off)
cmd = LINUX_REBOOT_CMD_HALT;
mutex_lock(&reboot_mutex);
switch (cmd) {
case LINUX_REBOOT_CMD_RESTART:
kernel_restart(NULL);
break;
case LINUX_REBOOT_CMD_CAD_ON:
C_A_D = 1;
break;
case LINUX_REBOOT_CMD_CAD_OFF:
C_A_D = 0;
break;
case LINUX_REBOOT_CMD_HALT:
kernel_halt();
do_exit(0);
panic("cannot halt");
case LINUX_REBOOT_CMD_POWER_OFF:
kernel_power_off();
do_exit(0);
break;
case LINUX_REBOOT_CMD_RESTART2:
if (strncpy_from_user(&buffer[0], arg, sizeof(buffer) - 1) < 0) {
ret = -EFAULT;
break;
}
buffer[sizeof(buffer) - 1] = '\0';
kernel_restart(buffer);
break;
#ifdef CONFIG_KEXEC
case LINUX_REBOOT_CMD_KEXEC:
ret = kernel_kexec();
break;
#endif
#ifdef CONFIG_HIBERNATION
case LINUX_REBOOT_CMD_SW_SUSPEND:
ret = hibernate();
break;
#endif
default:
ret = -EINVAL;
break;
}
mutex_unlock(&reboot_mutex);
return ret;
}
有很多分支,我们只关心kernel_power_off()和kernel_restart()两函数就行
如下:
void kernel_power_off(void)
{
kernel_shutdown_prepare(SYSTEM_POWER_OFF);//关闭外设
if (pm_power_off_prepare)
pm_power_off_prepare();
migrate_to_reboot_cpu();
syscore_shutdown();//关闭syscore
printk(KERN_EMERG "Power down.\n");//关键打印
kmsg_dump(KMSG_DUMP_POWEROFF);
machine_power_off();
}
void kernel_restart(char *cmd)
{
kernel_restart_prepare(cmd);//关闭外设
migrate_to_reboot_cpu();
syscore_shutdown();//关闭syscore
if (!cmd)
printk(KERN_EMERG "Restarting system.\n");//关键打印
else
printk(KERN_EMERG "Restarting system with command '%s'.\n", cmd);
kmsg_dump(KMSG_DUMP_RESTART);
machine_restart(cmd);
}
都执行XX_prepare()函数
static void kernel_shutdown_prepare(enum system_states state)
{
blocking_notifier_call_chain(&reboot_notifier_list,
(state == SYSTEM_HALT)?SYS_HALT:SYS_POWER_OFF, NULL);
system_state = state;
usermodehelper_disable();
device_shutdown();
}
void kernel_restart_prepare(char *cmd)
{
blocking_notifier_call_chain(&reboot_notifier_list, SYS_RESTART, cmd);
system_state = SYSTEM_RESTART;
usermodehelper_disable();
device_shutdown();
}
除了前面不同,都调用了device_shutdown()函数,关闭外设。
machine_power_off() machine_resestart()函数实现
void machine_power_off(void)
{
preempt_disable();
smp_send_stop();
if (pm_power_off)
pm_power_off();//关机
}
void machine_restart(char *cmd)
{
preempt_disable();
smp_send_stop();
/* Flush the console to make sure all the relevant messages make it
* out to the console drivers */
arm_machine_flush_console();
arm_pm_restart(reboot_mode, cmd);//重启
/* Give a grace period for failure to restart of 1s */
mdelay(1000);
/* Whoops - the platform was unable to reboot. Tell the user! */
printk("Reboot failed -- System halted\n");
local_irq_disable();
while (1);
}
pm_power_offf() arm_pm_restart()都是一个函数指针
赋值如下:
[kernel/drivers/power/reset/msm-poweroff.c]
pm_power_off = do_msm_poweroff;
arm_pm_restart = do_msm_restart;
高通平台的关机代码与之前有所不同,现在文件msm-poweroff.c以前是restart.c。
do_msm_poweroff()与do_msm_restart()实现如下:
static void do_msm_poweroff(void)
{
....
pr_notice("Powering off the SoC\n");//关键打印
#ifdef CONFIG_MSM_DLOAD_MODE
set_dload_mode(0);//关机,所以dloadmode是0
#endif
qpnp_pon_system_pwr_off(PON_POWER_OFF_SHUTDOWN);//配置PMIC,是关机
.....
/* MSM initiated power off, lower ps_hold */
__raw_writel(0, msm_ps_hold);//拉 PS_HOLD,执行关机动作。
mdelay(10000);
pr_err("Powering off has failed\n");
return;
}
static void do_msm_restart(enum reboot_mode reboot_mode, const char *cmd)
...
pr_notice("Going down for restart now\n");//关键打印
msm_restart_prepare(cmd);//重启准备前动作
#ifdef CONFIG_MSM_DLOAD_MODE
/*
* Trigger a watchdog bite here and if this fails,
* device will take the usual restart path.
*/
if (WDOG_BITE_ON_PANIC && in_panic)
msm_trigger_wdog_bite();
#endif
....
halt_spmi_pmic_arbiter();
__raw_writel(0, msm_ps_hold);//拉PS_HOLD重启
mdelay(10000);
}
msm_restart_prepare()实现
static void msm_restart_prepare(const char *cmd)
{
#ifdef CONFIG_MSM_DLOAD_MODE
/* Write download mode flags if we're panic'ing
* Write download mode flags if restart_mode says so
* Kill download mode if master-kill switch is set
*/
set_dload_mode(download_mode &&
(in_panic || restart_mode == RESTART_DLOAD));//设置dload
#endif
/* Hard reset the PMIC unless memory contents must be maintained. */
if (get_dload_mode() || (cmd != NULL && cmd[0] != '\0'))
qpnp_pon_system_pwr_off(PON_POWER_OFF_WARM_RESET);//设置PIMC为热重启
else
qpnp_pon_system_pwr_off(PON_POWER_OFF_HARD_RESET);//设置PIMC为硬重启
if (cmd != NULL) {
if (!strncmp(cmd, "bootloader", 10)) {
__raw_writel(0x77665500, restart_reason);//写一些东东到IMEM,用于bootloader,recovery等
} else if (!strncmp(cmd, "recovery", 8)) {
__raw_writel(0x77665502, restart_reason);
} else if (!strcmp(cmd, "rtc")) {
__raw_writel(0x77665503, restart_reason);
} else if (!strncmp(cmd, "oem-", 4)) {
unsigned long code;
int ret;
ret = kstrtoul(cmd + 4, 16, &code);
if (!ret)
__raw_writel(0x6f656d00 | (code & 0xff),
restart_reason);
} else if (!strncmp(cmd, "edl", 3)) {
enable_emergency_dload_mode();
} else {
__raw_writel(0x77665501, restart_reason);
}
}
.....
}
do_msm_poweroff()与do_msm_restart()都设置了dload,PMIC,唯一不同的是do_msm_restart()里多了一个__raw_writel的动作,即reason写入IMEM,目的在于重启进入sbl1时判断应该进入那种模式,如我们开发用的bootloader模式,恢复出厂设置的recovery模式等。
完了
文章转载:

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 0
0 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)