【Pytorch深度学习实战】(6)递归神经网络(RNN)
上图展示的是最简单的 RNN 结构,此外 RNN 还存在着很多变种,比如双向 RNN(Bidirectional RNN),深度双向 RNN(Deep Bidirectional RNN)等。RNN 把所处理的数据序列视作时间序列,在每一个时刻 tt,每个 RNN 的神经元接受两个输入:当前时刻的输入样本 xtxt,和上一时刻自身的输出 ht-1。RNN 的神经元接受的输入除了“前辈”的输出,还有
🔎大家好,我是Sonhhxg_柒,希望你看完之后,能对你有所帮助,不足请指正!共同学习交流🔎
📝个人主页-Sonhhxg_柒的博客_CSDN博客 📃
🎁欢迎各位→点赞👍 + 收藏⭐️ + 留言📝
📣系列专栏 - 机器学习【ML】 自然语言处理【NLP】 深度学习【DL】
🖍foreword
✔说明⇢本人讲解主要包括Python、机器学习(ML)、深度学习(DL)、自然语言处理(NLP)等内容。
如果你对这个系列感兴趣的话,可以关注订阅哟👋
循环神经网(Recurrent Neural Network,RNN)
RNN,循环神经网络,也有人将它翻译为递归神经网络。从这个名字就可以想到,它的结构中存在着“环”。
确实,RNN 和 NN/DNN 的数据单一方向传递不同。RNN 的神经元接受的输入除了“前辈”的输出,还有自身的状态信息,其状态信息在网络中循环传递。
RNN 的结构用图形勾画出来,是下图这样的:
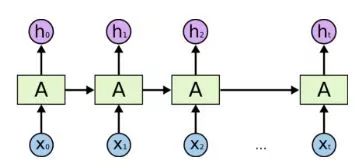
图 1
注意:图中的 AA 并不是一个神经元,而是一个神经网络块,可以简单理解为神经网络的一个隐层。
RNN 的这种结构,使得它很适合应用于序列数据的处理,比如文本、语音、视频等。这类数据的样本间存在顺序关系(往往是时序关系),每个样本和它之前的样本存在关联。
RNN 把所处理的数据序列视作时间序列,在每一个时刻 tt,每个 RNN 的神经元接受两个输入:当前时刻的输入样本 xtxt,和上一时刻自身的输出 ht-1 。
t 时刻的输出:
图1经过进一步简化,将隐层的自连接重叠,就成了下图:
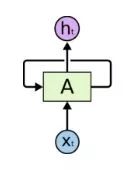
图2
上图展示的是最简单的 RNN 结构,此外 RNN 还存在着很多变种,比如双向 RNN(Bidirectional RNN),深度双向 RNN(Deep Bidirectional RNN)等。
RNN 的作用最早体现在手写识别上,后来在语音和文本处理中也做出了巨大的贡献,近年来也不乏将其应用于图像处理的尝试。
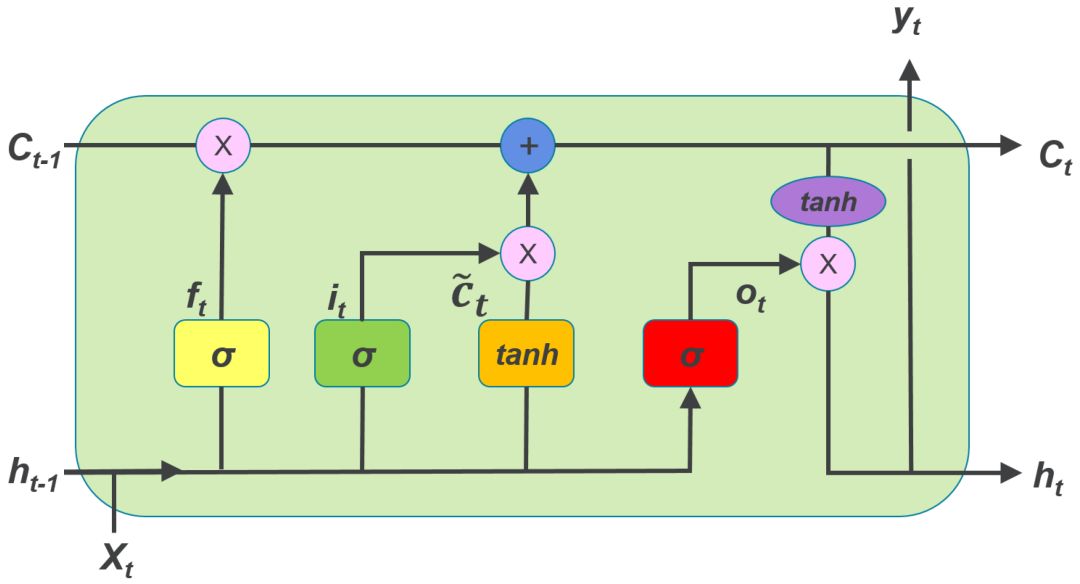
长短时记忆(Long Short Term Memory,LSTM)
LSTM 可以被简单理解为是一种神经元更加复杂的 RNN,处理时间序列中当间隔和延迟较长时,LSTM 通常比 RNN 效果好。
相较于构造简单的 RNN 神经元,LSTM 的神经元要复杂得多,每个神经元接受的输入除了当前时刻样本输入,上一个时刻的输出,还有一个元胞状态(Cell State),LSTM 神经元结构请参见下图:
LSTM 神经元中有三个门。
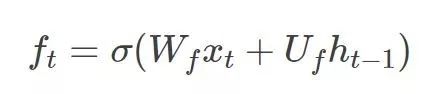
遗忘门(Forget Gate):接受xt 和 0ht-1 为输入,输出一个0到11之间的值,用于决定在多大程度上保留上一个时刻的元胞状态ct-1。1表示全保留,0表示全放弃。
输入门(Input Gate): 用于决定将哪些信息存储在这个时刻的元胞状态 ct ct 中。
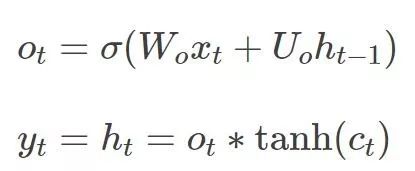
输出门(Output Gate):用于决定输出哪些信息。
递归神经网络Pytorch的实现
import torch
import torch.nn as nn
import torchvision
import torchvision.transforms as transforms
# 设备配置
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 超参数
sequence_length = 28
input_size = 28
hidden_size = 128
num_layers = 2
num_classes = 10
batch_size = 100
num_epochs = 2
learning_rate = 0.01
# MNIST 数据集
train_dataset = torchvision.datasets.MNIST(root='../../data/',
train=True,
transform=transforms.ToTensor(),
download=True)
test_dataset = torchvision.datasets.MNIST(root='../../data/',
train=False,
transform=transforms.ToTensor())
# 数据加载器
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=batch_size,
shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset,
batch_size=batch_size,
shuffle=False)
# 循环神经网络(多对一)
class RNN(nn.Module):
def __init__(self, input_size, hidden_size, num_layers, num_classes):
super(RNN, self).__init__()
self.hidden_size = hidden_size
self.num_layers = num_layers
self.lstm = nn.LSTM(input_size, hidden_size, num_layers, batch_first=True)
self.fc = nn.Linear(hidden_size, num_classes)
def forward(self, x):
# 设置初始隐藏和单元格状态
h0 = torch.zeros(self.num_layers, x.size(0), self.hidden_size).to(device)
c0 = torch.zeros(self.num_layers, x.size(0), self.hidden_size).to(device)
# 前向传播 LSTM
out, _ = self.lstm(x, (h0, c0)) # out: tensor of shape (batch_size, seq_length, hidden_size)
# 解码上一个时间步的隐藏状态
out = self.fc(out[:, -1, :])
return out
model = RNN(input_size, hidden_size, num_layers, num_classes).to(device)
# 损失和优化器
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
# 训练模型
total_step = len(train_loader)
for epoch in range(num_epochs):
for i, (images, labels) in enumerate(train_loader):
images = images.reshape(-1, sequence_length, input_size).to(device)
labels = labels.to(device)
# 前向传播
outputs = model(images)
loss = criterion(outputs, labels)
# 向后和优化
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (i+1) % 100 == 0:
print ('Epoch [{}/{}], Step [{}/{}], Loss: {:.4f}'
.format(epoch+1, num_epochs, i+1, total_step, loss.item()))
# 测试模型
model.eval()
with torch.no_grad():
correct = 0
total = 0
for images, labels in test_loader:
images = images.reshape(-1, sequence_length, input_size).to(device)
labels = labels.to(device)
outputs = model(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Test Accuracy of the model on the 10000 test images: {} %'.format(100 * correct / total))
# 模型保存
torch.save(model.state_dict(), 'model.ckpt')
CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 8
8 0
0- 0



 已为社区贡献25条内容
已为社区贡献25条内容

所有评论(0)