SVPWM仿真搭建及马鞍波形成的原因分析
SVPWM仿真搭建及马鞍波形成的原因分析
对于SVPWM的理解
SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。空间电压矢量PWM与传统的正弦PWM不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。SVPWM技术与SPWM相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于数字化实现。
SVPWM基本原理
SVPWM的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM波形。
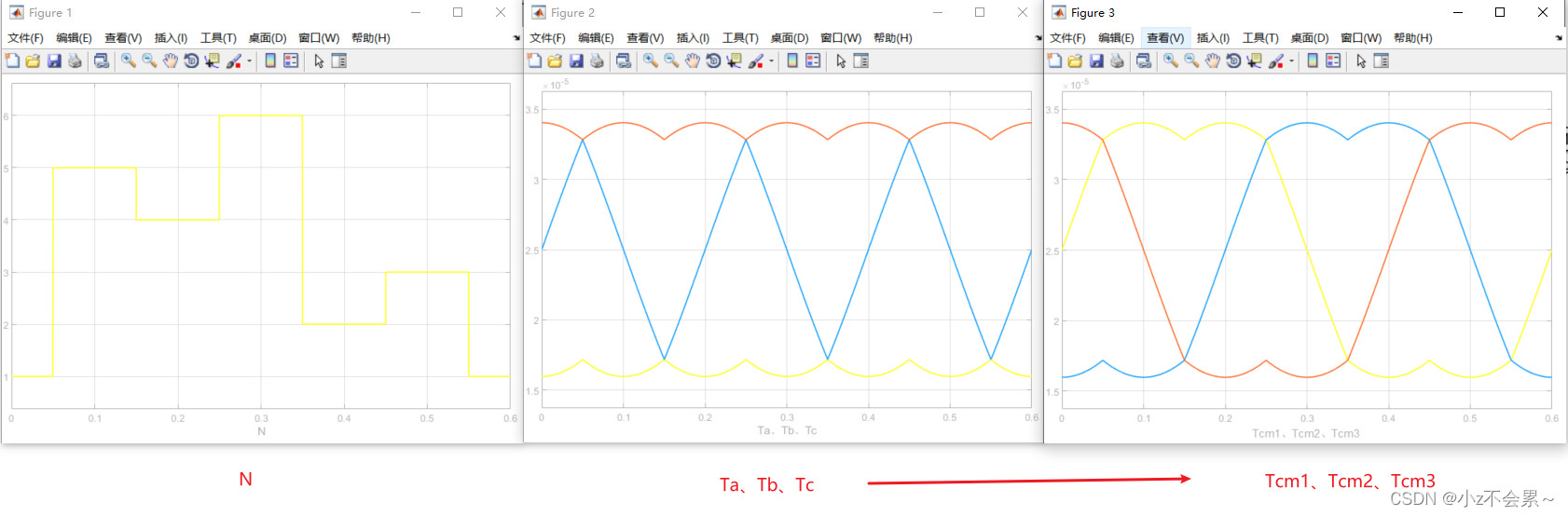
1.扇区判断



2.矢量作用时间计算

中间变量X、Y、Z的计算

T1和T2的计算

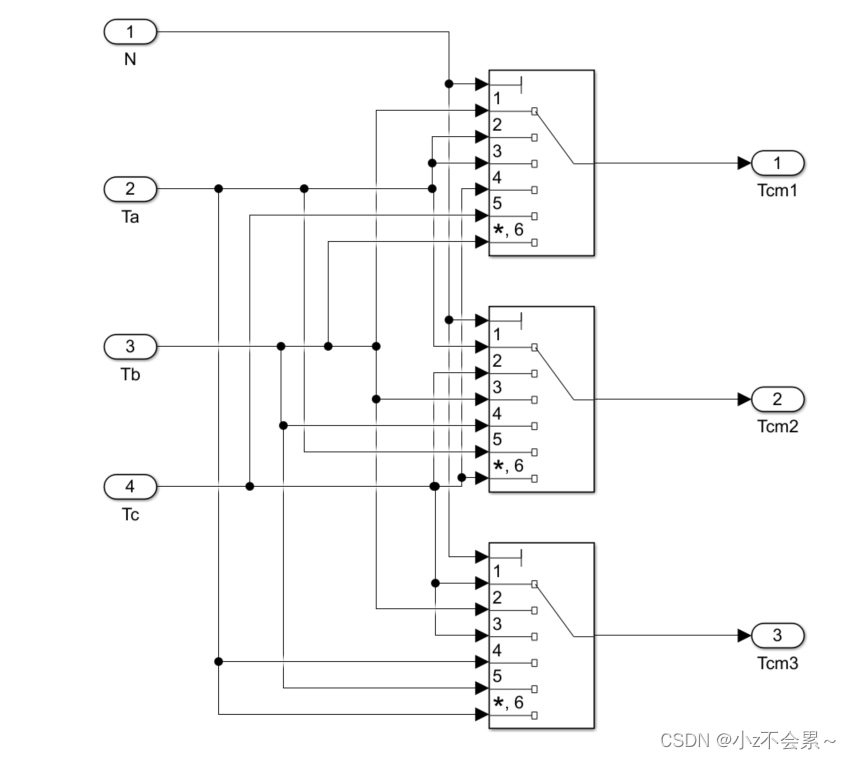
3.切换时间Tcm1、Tcm2、Tcm3的计算

中间量Ta、Tb、Tc的计算
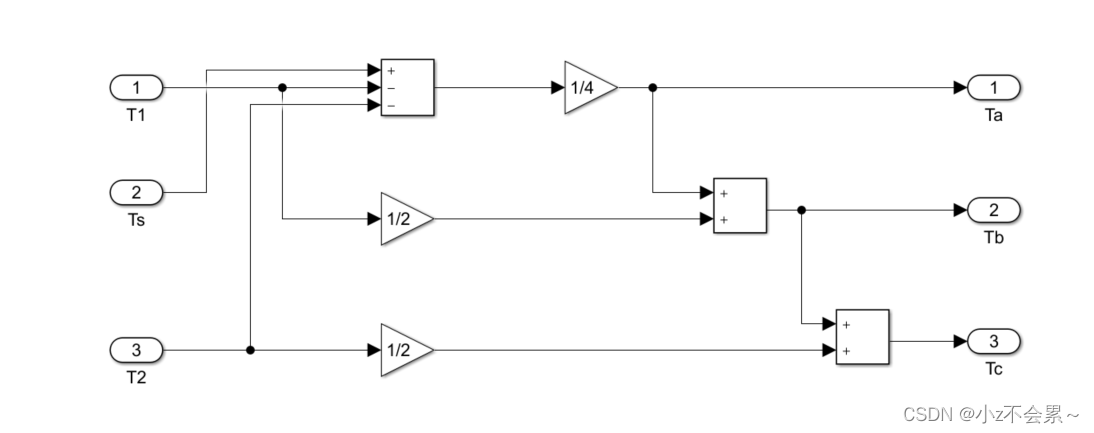
Tcm1、Tcm2、Tcm3的计算
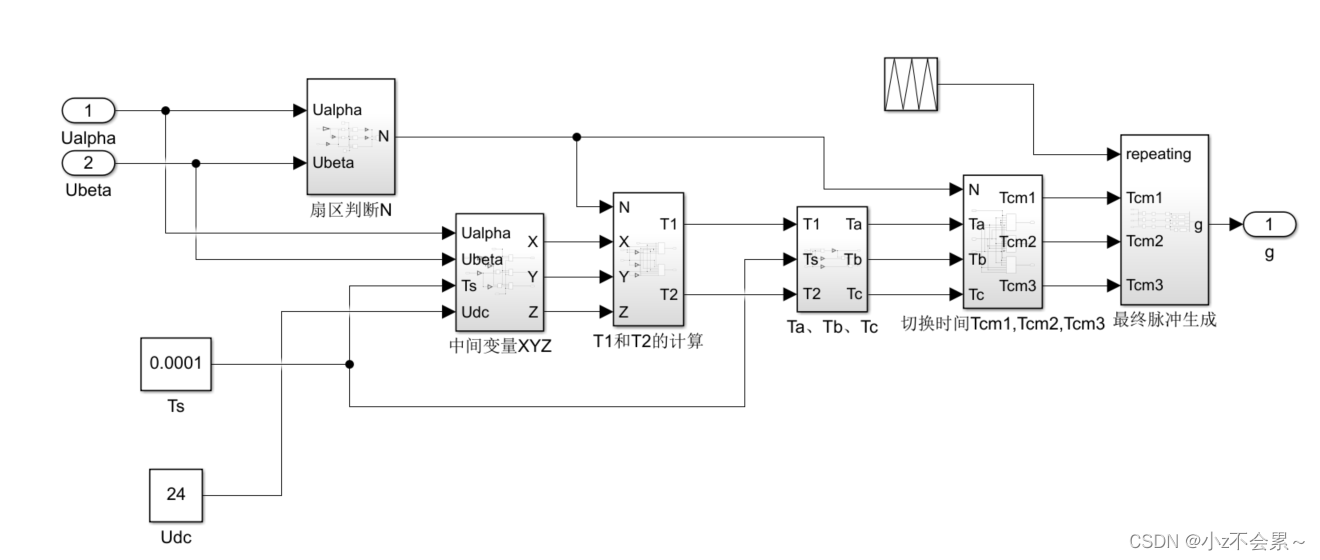
4.最终输出脉冲生成

SVPWM整体框图
SVPWM的验证

仿真结果
三相电流波形Ia,Ib,Ic

电机的速度和位置波形

HALL编码器的信号值

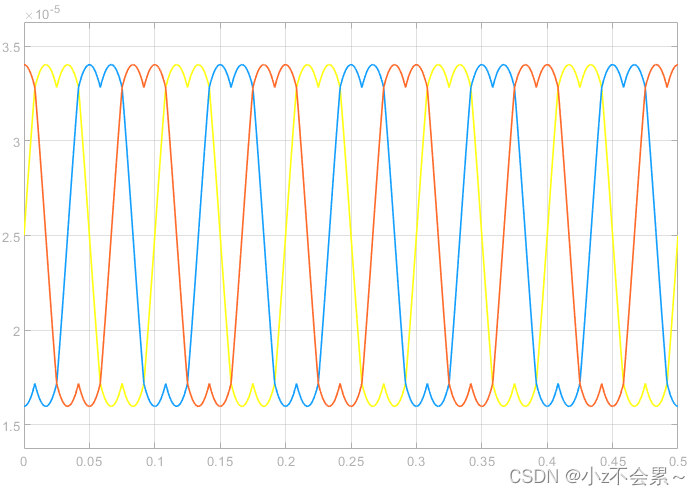
SVPWM的输出-马鞍形调制波
SVPWM脉宽调制过程分析
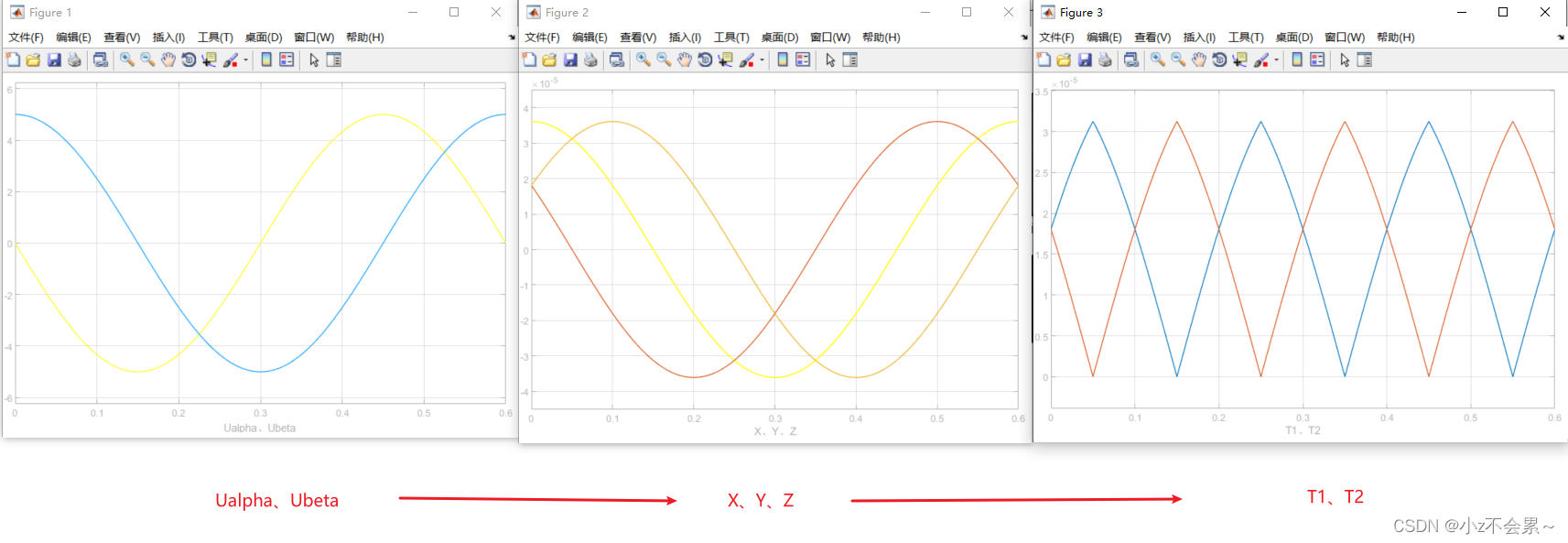
先由两相相位相差90°的正弦信号变为三相相位相差60°的正弦信号再变为两相相位相差90°的锯齿波型信号(三次谐波)。
马鞍波形成的原因
 我们以其中的一个脉宽调制信号为例,即以
我们以其中的一个脉宽调制信号为例,即以(第三幅图的黄线图例)为例,其他两个脉冲调制信号原理相同,
位于
处,对应表中
信号,即图2中的蓝线部分(图二中黄线代表
,蓝线代表
,红线代表
)。
位于
,对应表中
信号,即图2中的红线部分。
位于
,对应表中的
信号,即图2中的红线部分。
位于
,对应表中
信号,即图2中的蓝线部分。
位于
,对应表中
信号,即图2中的黄线部分。
位于
,对应表中
信号,即图2中的黄线部分。
位于
,对应表中
信号,即图2中的蓝线部分。以上就是马鞍波形成的原因。
SPWM用的是对称的三相正弦调制波,而SVPWM用的对称的三相马鞍调制波,由于马鞍波拉长了高幅值电压的持续时间,这也从侧面说明了,SVPWM提高了电压的利用率。
为什么SVPWM的电压利用率是100%?


这里、
、
、
、
、
大小都为
,
这里解释一下,为什么说SVPWM的电压利用率为100%
这里不是六个电压矢量的大小都为吗,而前面求电压空间矢量
时乘了一个
,
所以电压利用率为100%。
这里的U_m对应相电压幅值,其实对应的就是、
、
、
、
、
从调制比的角度分析


感谢大家的阅读!!!!^_^

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 38
38 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)