计算机视觉教程(第2版)1-8章期末复习
不全面,只针对我们老师画的重点着重标记的!第一章 绪论1.计算机视觉用计算机实现人类的视觉功能,对客观世界中三维场景的感知、加工和解释。2.图像表达函数T(x,y,z,t,λ),xyz是空间变量,t是时间变量,λ是辐射的波长。3.图像文件格式BMP 位图,GIF图像文件格式标准,TIFF 独立于操作系统和文件系统的格式,便于在软件中进行图像数据交换4.欧氏距离 城区距离 棋盘距离^2+^2 | |
不全面,只针对我们老师画的重点着重标记的!
第一章 绪论
1.计算机视觉
用计算机实现人类的视觉功能,对客观世界中三维场景的感知、加工和解释。
2.图像表达函数
T(x,y,z,t,λ),xyz是空间变量,t是时间变量,λ是辐射的波长。
3.图像文件格式
BMP 位图,GIF图像文件格式标准,TIFF 独立于操作系统和文件系统的格式,便于在软件中进行图像数据交换
4.欧氏距离 城区距离 棋盘距离
^2+^2 | |+| | max(| |,| |}
5.范数
测量空间的一个基本概念。
6.模拟图像 f(x,y) xy指的是坐标点位置,数字图像I(r,c) r代表图像的行,c代表图像的列。
第二章 图像采集
7.采集装置
分为传感器和数字化器
8.图像采集模型:几何成像模型和亮度成像模型。
f(x,y)中(x,y)是像素的空间位置 前者确定,f是像素的幅度数值(灰度)后者确定。
9.几何成像模型
坐标系统:1.世界坐标系统XYZ;2.摄像机坐标系统xyz;3.图像平面坐标系统x'y'
(1)重合模型(理想):xyz与XYZ重合
由世界坐标得到图像坐标:x=λX/(λ-Z) ; y=λY/(λ-Z) λ是相机焦距
(2)分离模型:不重合,位置偏差用矢量D,扫视角,倾斜角。平移矩阵T有Dx,Dy,Dz,齐次表达:Ch = P*R * T*Wh,R旋转矩阵,Wh齐次坐标,P透视变换矩阵
10.采样点数↑ 空间分辨率↑图像细节↑;量化级别↑ 幅度分辨率↑
11.结构光法:p34
Z = s+d ; d = r*tanα / sinβ(1-tanα cotβ) ; tanα = h/λ
12.标定
概念:由一组基准点计算出相机内、外部参数的过程。
标定内容:外部参数,摄像机姿态参数(例如摄像机的位置方式,平移等);内部参数,摄像机自身参数(如焦距、尺度因子等)
步骤: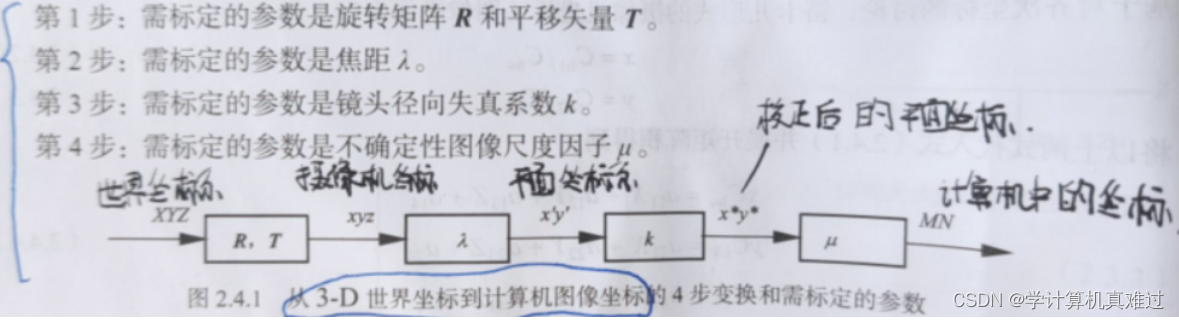
第四章 基元检测
13.一阶导数算子(偏导)
(1)罗伯特交叉算子:2X2
(2)普瑞维特算子:3X3 只有1,-1
(3)索贝尔算子:3X3 不止有1,-1
14.二阶导数算子
(1)拉普拉斯算子:总和0 3X3 中+边-
(2)马尔算子:在(1)之前先对检测图进行平滑
(3)坎尼算子:最复杂的那个,利用了高斯模型,3个准则:信噪比准则、定位精度准则、单边缘相应准则。
15.边界闭合
边缘像素连接2信息:梯度幅度和梯度方向都要相似。
16.边界细化
方法(1)用模板进行非最大消除(把不是最大梯度值的像素消去)
(2)用插值进行费最大消除(更加精确,但计算量很大)
17.SUSAN算子(积分)
在有噪声时,SUSAN算子性能好;
核同值区USAN:与核有相同值的区域
USAN原理:USAN面积较大(超过一半时)表明核像素处在图像中的灰度一致区域,在模板接近边缘时该面积减少,而在接近角点时减少的更多,USAN面积在角点处取得最小值
18.哈夫变换
基本哈弗变化两个方式:(1)点-线对偶性 y=px+q, q=-px+y (2)极坐标方程(在直线接近竖直方向,pq的值都会无穷大而使用极坐标)
广义哈夫变换原理:利用表格建立曲线或轮廓点与参考点之间的关系,参考点的坐标可以有轮廓点的坐标计算。
完整广义哈夫变换:考虑轮廓平移、放缩、旋转,参数空间从2D变成4D,增加了轮廓取向角参数和尺度变换系数。
19.椭圆定位和检测方法
(1)直径二分法
(2)弦-切线法
20.位置直方图
是将图像向多个轴投影,并对像素灰度求和而得到的直方图,也叫横向直方图。
检测小目标用位置直方图。
第五章 目标分割
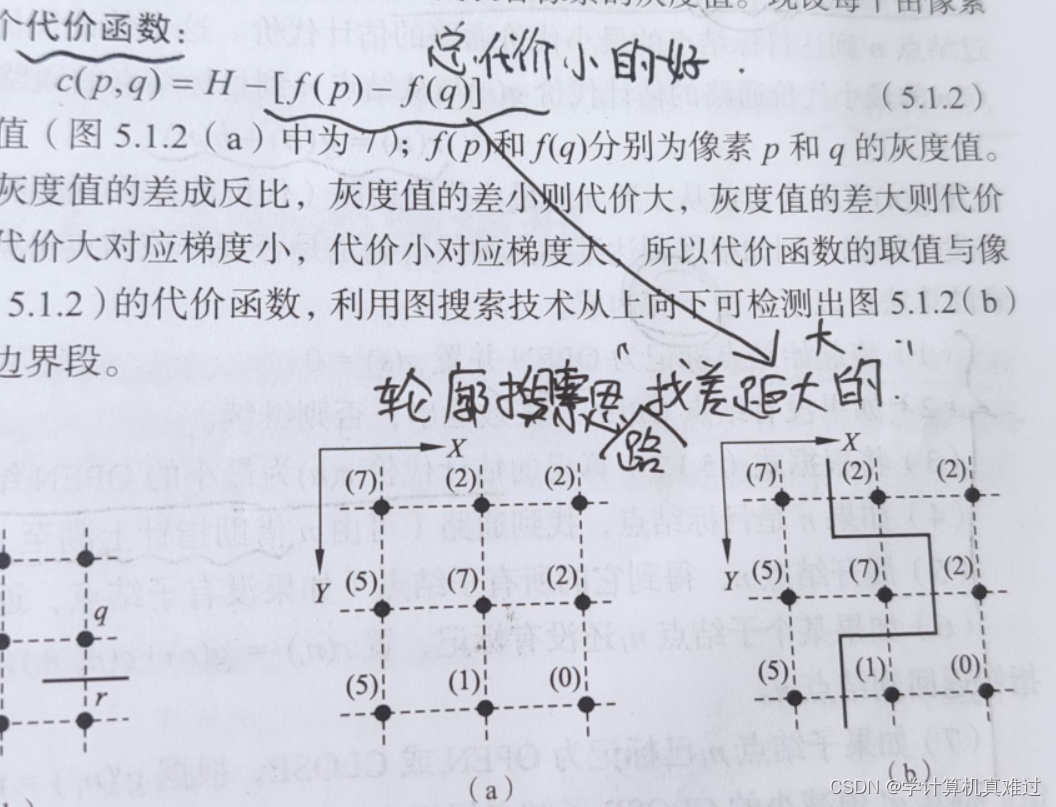
21.图搜索
代价函数: c(p,q) = H - [f(p) - f(q)]
22.动态规划步骤
(1)将起始节点标记为OPEN并置g(s)=0
(2)如果没有结点OPEN,失败退出,否则继续
(3)将根据公式r(n)=g(n)+h(n)算的估计代价r(n)为最小的OPEN结点标记为CLOSE
(4)如果n是目标结点,找到通路,退出,否则继续
(5)展开结点n,得到他的所有子结点
(6)如果某个子结点ni还没被标记,置r(ni)=g(n)+c(n,ni),标记它为OPEN并将指向它的指针返回结点n
(7)如果某个子结点ni被标记为OPEN或CLOSE,根据g’(ni)=min[g(ni),g(n)+c(n,ni)]更新它的值。将其g’值减小的CLOSE子结点标记为OPEN,并将原来指向所有其g’值减小的子结点的指针重新指向n,返回步骤(2)
23.主动轮廓模型(蛇模型)
构建一个初步的围绕图像中目标的封闭轮廓曲线, 在通过进一步改变封闭曲线的形状以逼近目标的真实轮廓。
24.能量函数
(1)内部能量函数:来推动主动轮廓形状的改变,并保持轮廓上点之间的距离不要太远or太近,保持连通性。又分为连续能量(轮廓内各点是连续的)和膨胀力(轮廓不应该过于收缩,不分点需要膨胀)
(2)外部能量函数:将变形模板向图像中目标的边缘位置吸引。分为图像灰度能量和图像梯度能量。
25.基本阈值技术
从一副灰度取值gmin gmax之间确定一个灰度阈值T来分割灰度图像,把><T的分为两边。
26.阈值分类
(1)全局阈值:仅根据个个图像像素的本身性质f(x,y)选取
(2)局部阈值:(1)+像素周围局部区域性质q(x,y)选取
(3)动态阈值:(2)+像素位置坐标(x,y)选取
(1)、(2)为固定阈值
27.特征空间聚类
基本聚类方法:(1)k-均值聚类(常用):【1】任意选K个初始类均值【2】特征点赋类【3】更新类均值【4】判断算法收敛
(2)ISODATA聚类
第六章 目标表达和描述
28.链码
是对边界点的一种编码表示方法。
4-方向和8-方向的共同特点:每个线段的长度固定而方向数目为有限。
→0 ↑1 ←2 ↓3
链码起点归一化:序列最小
链码旋转归一化:把最后一位移到前面,算逆时针转多少次
缝隙码:链码对应直线段连接的是两个相邻轮廓像素的外边缘交叉点。
29.围绕区域方法:
(1)外接盒:包含目标区域的最小长方形
(2)围盒:最小包围长方形
(3)凸包:包含目标区域的最小凸包
30.骨架
概念:对目标区域的形状结构的一种表达。可以用一个区域点与两个边界点 的最小距离来定义
骨架都保持了与边界点距离最小的性质。
已知骨架求边界:用每个骨架点为中心的圆的集合,就可以得到原始边界。
31.边界形状数
一种形状数是给予链码的边界形状描述符,另一种是与区域紧凑性有关的目标描述符。
形状数是最小的链码的差分码。
边界形状数的计算: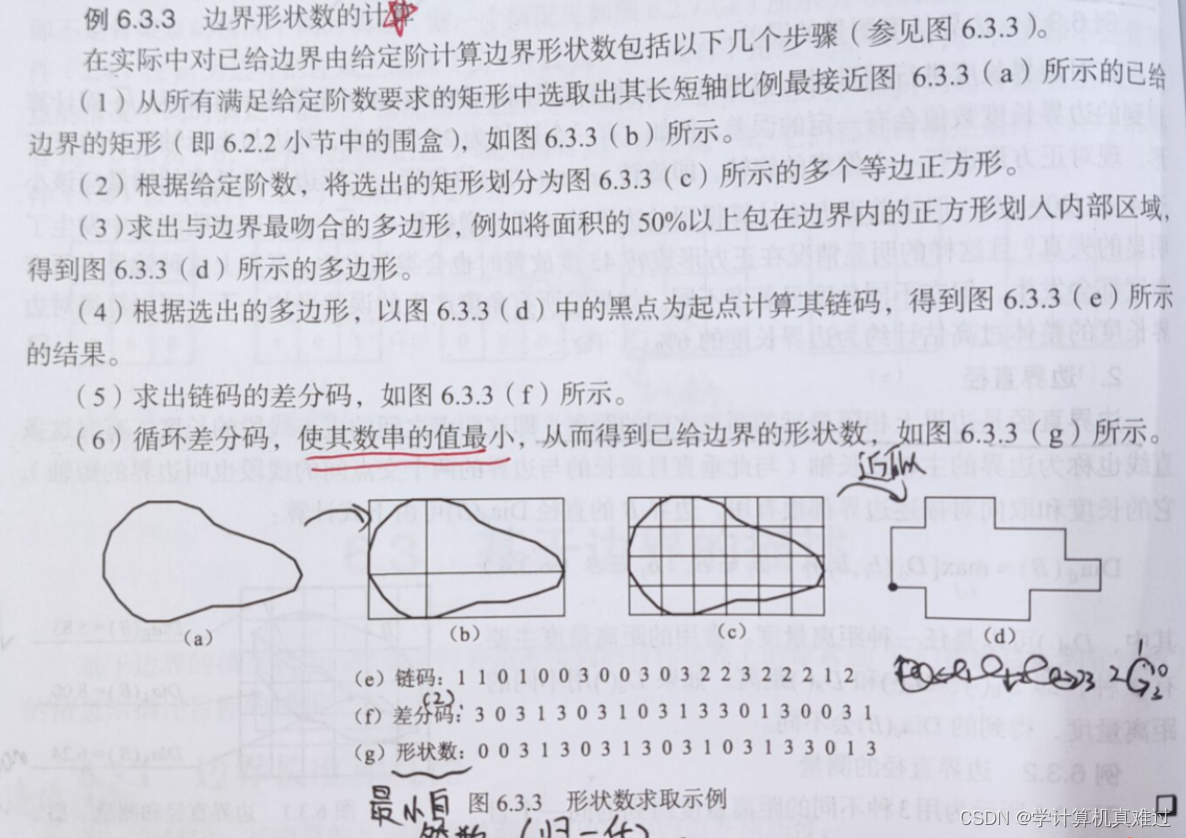
32.轮廓形状矩阵
形状矩阵是一个刻画目标轮廓的矢量,对给定目标,这个矢量的长度是固定的,记录了轮廓上个点的相对位置。
33.区域面积
对于多边形:内部格数+边界个数/2 -1
区域密度特征的描述符:透射率,光密度,积分光密度
34.区域形状数
描述区域的紧凑性
形状数越小,区域越紧凑
35.中心矩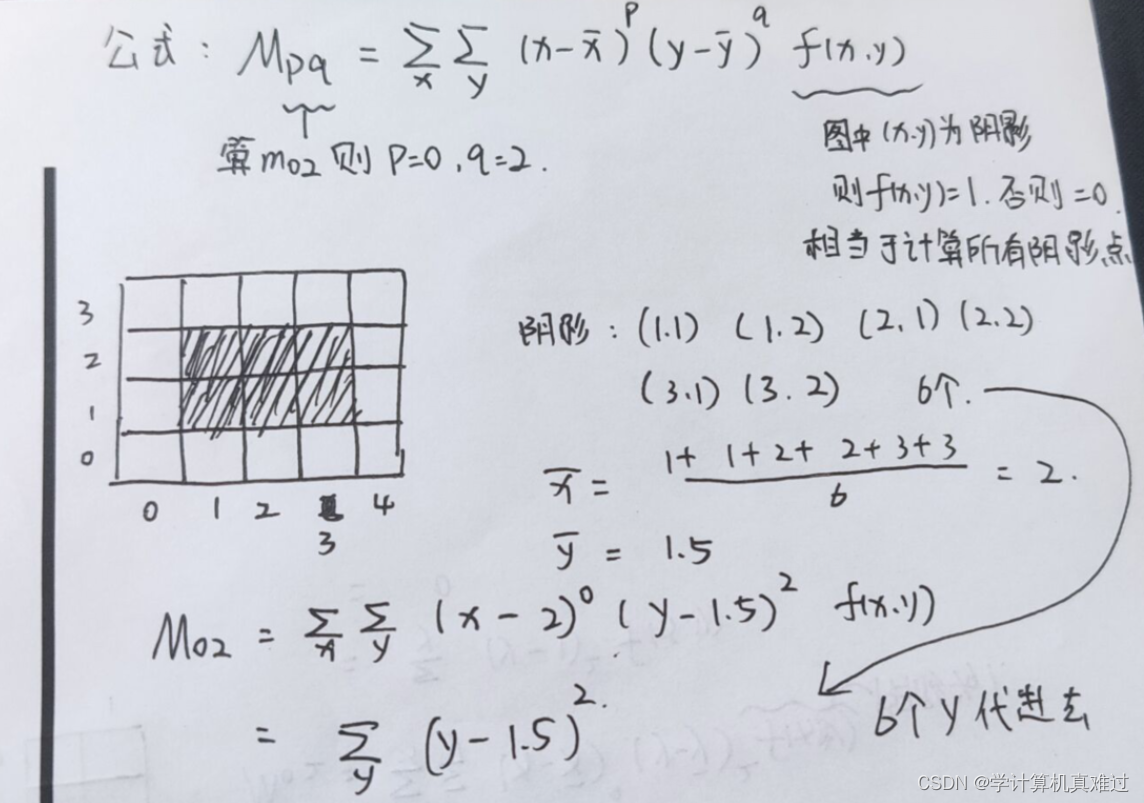
36.拓扑描述符
(1)欧拉数:描述了区域连通性
欧拉数E = 区域内连通组员的个数C - 区域内孔数H (‘B'的E = 1-2,’i‘的E = 2-0)
(2)欧拉公式: E = C- H = 顶点数V - 边数B + 面数E
第七章 纹理分析
37.局部二值模型-空间LBP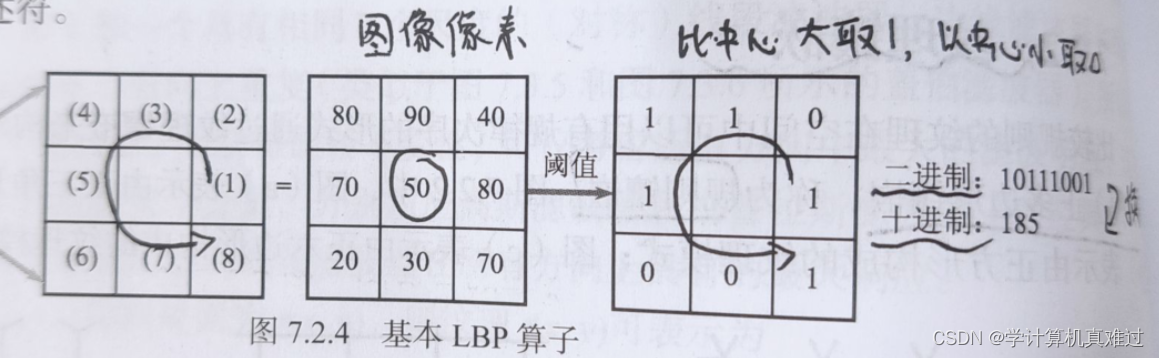
第八章 形状分析
38.形状紧凑性描述符
(1)外观比:R=L/W (外接盒的长/宽)
(2)形状因子:F = B^2/4πA (B区域边界周长,A区域面积)
(3)球状性:S=Ri/Rc(内切圆半径/外接圆半径)
(4)圆形性:C=μ/σ(区域重心到边界点的平均距离/区域重心到边界点各距离的方差 (先找重心,再算重心与各边界点的距离)
39.多边形计算方法
(1)基于收缩的最小周长多边形法
(2)基于聚合的最小均方误差线段逼近法 - 聚合多边形
(3)基于分裂的最小均方误差线段逼近法 - 分裂多边形
40.轮廓曲率
离散曲率的计算:

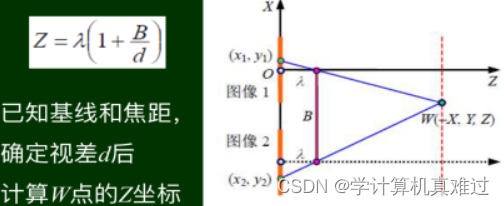
第九章 立体视觉
41.双目横向模式
两个单目系统在水平方向上并列放置,两个镜头的焦距均为l,其中心间的连线为系统的基线B
(1)视差和深度
视差d = x1 - x2 - B
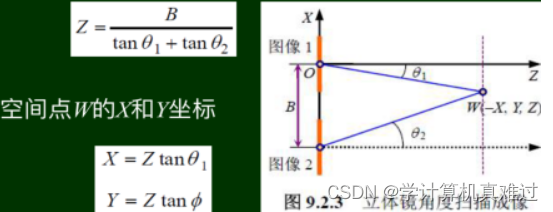
(2)角度扫描成像

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)