登录社区云,与社区用户共同成长
邀请您加入社区
机器人位姿表示
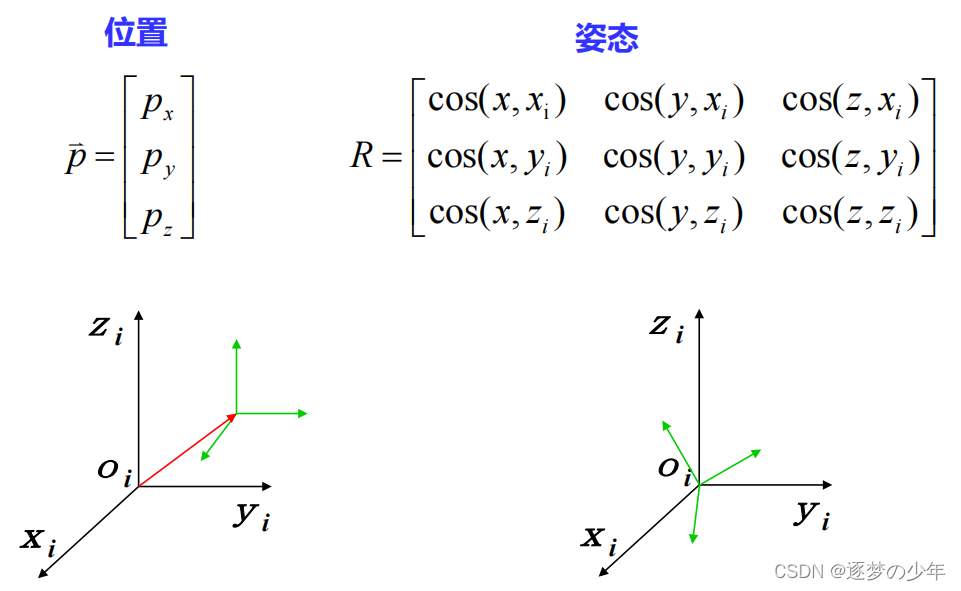
位姿:是描述某个对象(如坐标)在指定坐标系下的位置和姿态。 机器人常用位姿来描述其在空间坐标系中的位置与姿态
位置:在空间里的定位,刚体的位置可以用一个3x1的矩阵来表示,即刚体坐标系中心O`在基坐标系中的位置。 姿态:在空间里的朝向,刚体的姿态可以用一个3x3的矩阵来表示,即刚体坐标系在基坐标系中的姿态。 机器人学中,用齐次矩阵(4x4)来统一描述刚体的位置和姿态,如下图。通过矩阵的正逆变换和矩阵相乘操作,实现位姿的变换。
CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐
1 小时解读鸿蒙 10 大热点问题
用 OpenAI Assistants 做大模型应用开发
扫一扫分享内容
 机器人学中,用齐次矩阵(4x4)来统一描述刚体的位置和姿态,如下图。通过矩阵的正逆变换和矩阵相乘操作,实现位姿的变换。
机器人学中,用齐次矩阵(4x4)来统一描述刚体的位置和姿态,如下图。通过矩阵的正逆变换和矩阵相乘操作,实现位姿的变换。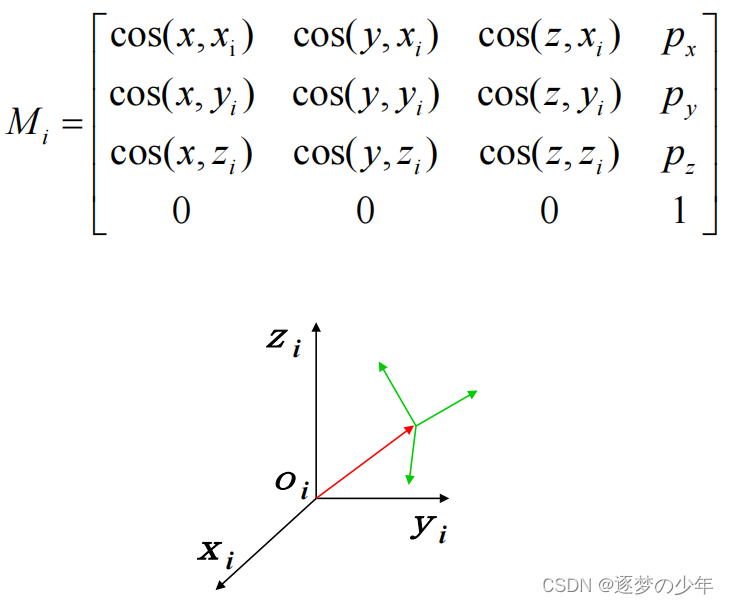









 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)