

Stewart六自由度平台正反解算法
1、反解反解:通过给定的六个姿态数据计算六个电动缸的位置长度。选好坐标系,数学建模。下平台固定,上平台运动。计算上平台6个坐标点经过运动变换之后计算出新的坐标点。计算上平台新的坐标点和下平台固定坐标点的两点距离,即可计算出电动缸新的长度。P=T*P0+P'。P为上平台新的坐标点,T是欧拉旋转变换复合矩阵,P'为空间三个方向平移量。T=T1*T2*T3。T1、T2、T3分别对应x轴、y轴、z轴方向的
目录
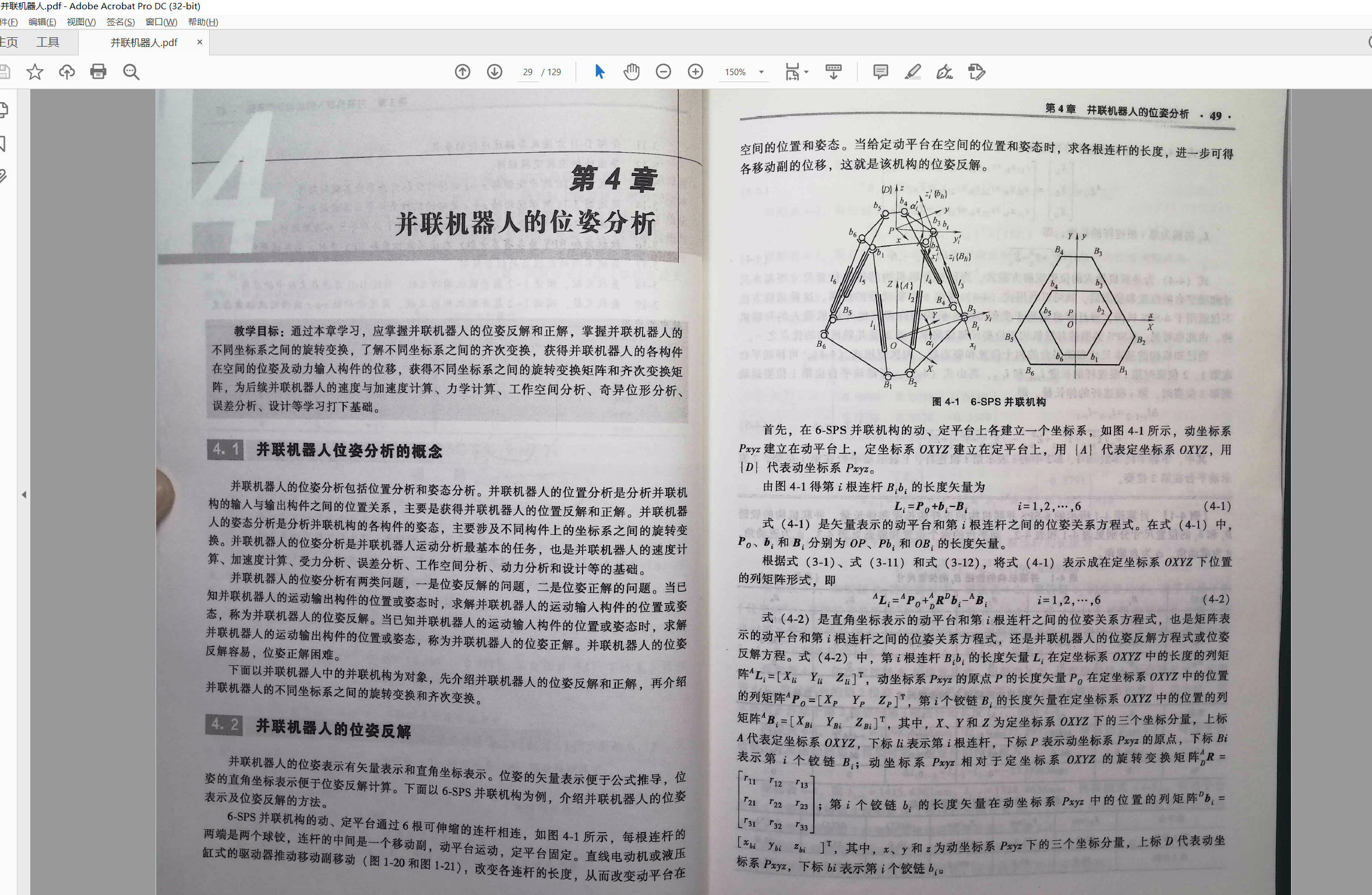
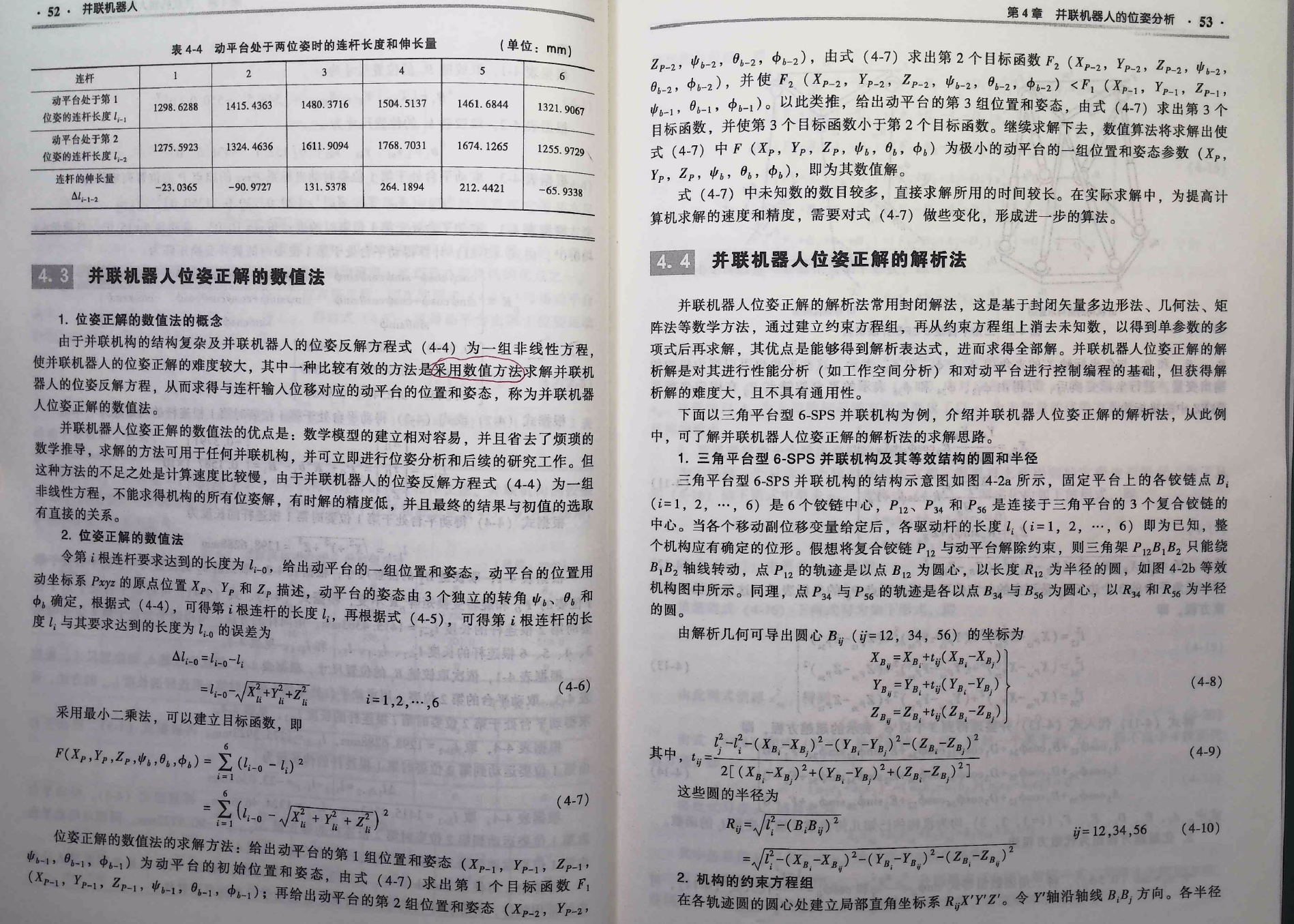
一、并联机器人学习的书
推荐一本学习并联机器人的好书,需要PDF电子档朋友请私聊我。¥20

二、六自由度并联摇摆平台
如下图所示,摇摆型六自由度计算请参考博客:Stewart并联六自由度摇摆平台计算-CSDN博客

0、前言
1、反解计算
反解:通过给定的六个姿态数据计算六个电动缸的位置长度。
选好坐标系,数学建模。下平台固定,上平台运动。计算上平台6个坐标点经过运动变换之后计算出新的坐标点。计算上平台新的坐标点和下平台固定坐标点的两点距离,即可计算出电动缸新的长度。

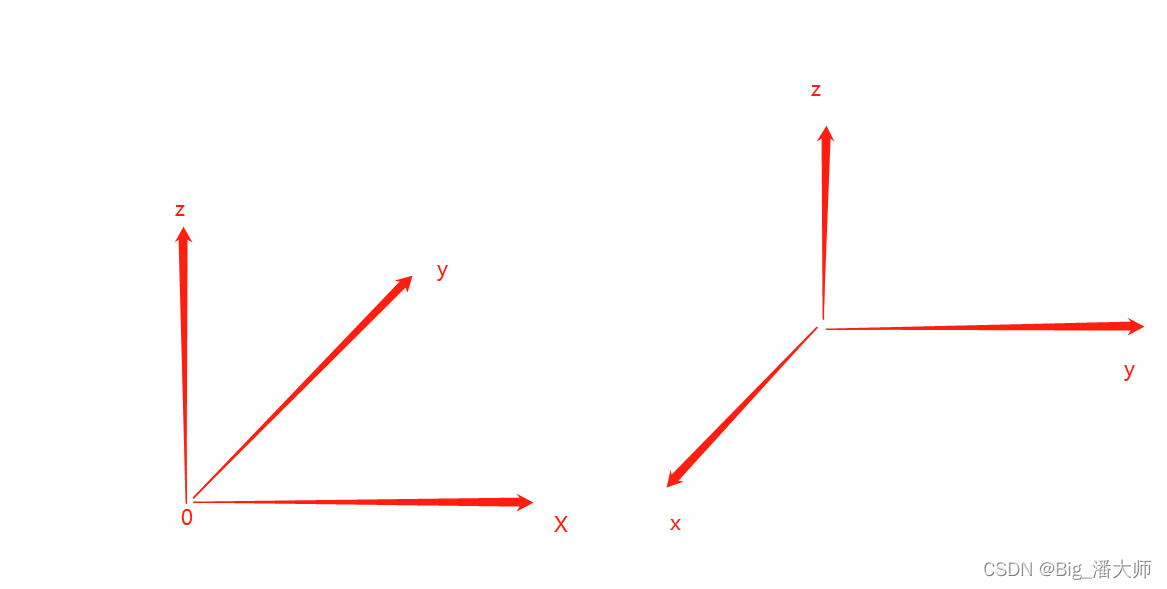
坐标系说明,使用欧拉坐标系。左右两个为同一个坐标系(人眼观察视角旋转90度即一样)
下平台 坐标点

上平台坐标点

C#坐标变量定义

P=T*P0+P'。P为上平台新的坐标点,T是欧拉旋转变换复合矩阵,P'为空间三个方向平移量。
T=T1*T2*T3。T1、T2、T3分别对应x轴、y轴、z轴方向的旋转矩阵。



2、正解计算
使用方法:牛顿迭代法。

正解方程
正解方程可以由反解方程变化而来,只是由于正解方程用解析方式表示起来过于麻烦,所以通过向量或者矩阵的方式来表示,这样理解跟实现起来要相对容易一些。由反解计算公式得:

正解方程的求解方法和步骤

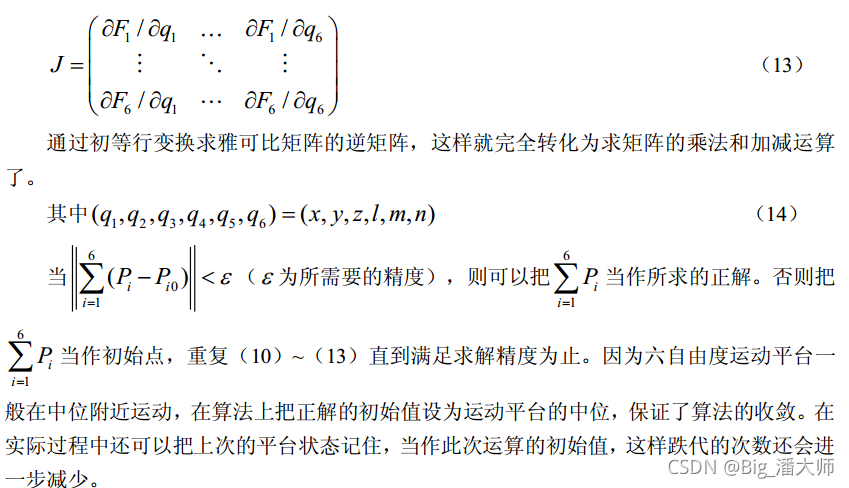
因为正解的迭代算法运行起来比较耗费时间,如果把迭代精度设置的过高,那样迭代的次数也会增加,这对要求实时控制的六自由度运动平台是不合适的。所以需要设置一个合理的精度,如10^-5。
3、C#逆解计算程序设计
反解点动界面


OpenGL跟Maya坐标系
OpenGL坐标系跟欧拉坐标系不一样,所以在软件界面显示的时候需要转换一下。

C#逆解下载连接或者私聊我,有偿出售。在校本科生勿扰。
https://download.csdn.net/download/panjinliang066333/52556653
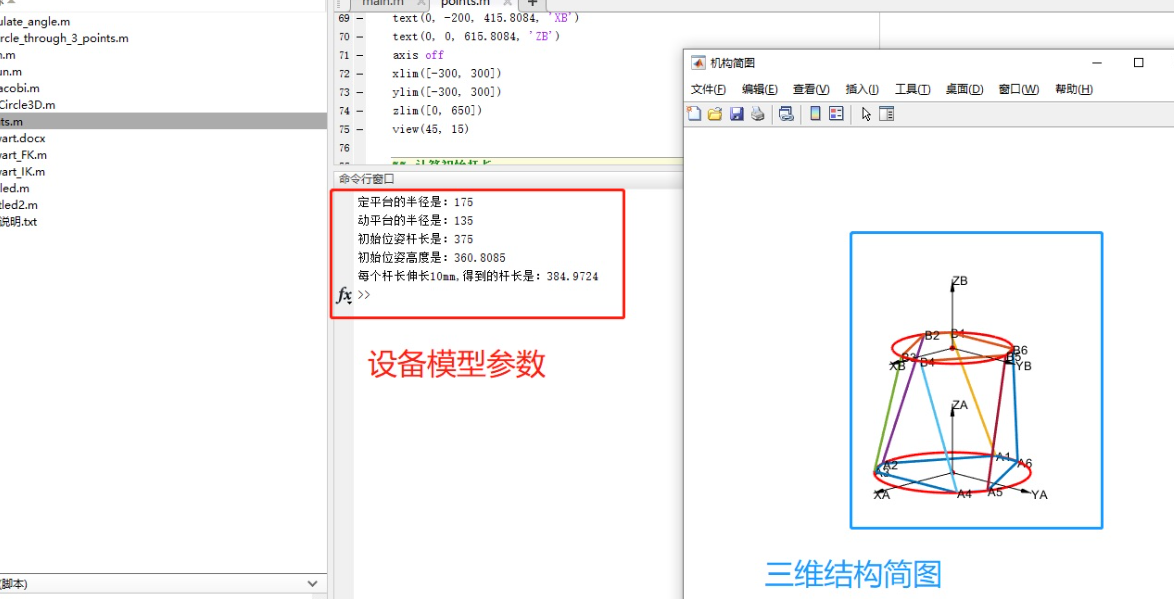
4、Matlab程序正反解计算
需要Matlab正反解计算程序的,请私聊我,有偿出售。在校本科生勿扰。


旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 15
15 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)