鸿蒙源码分析(六十五)
任务or线程?经过分析take_manager代码,我们发现任务的出现常常伴随着线程,任务池的工作和线程的工作原理有一定的相似度,我们今天分析一下这两者的区别。鸿蒙中任务就是一种线程,二者本质上没有区别,只是在不同的应用环境下有不一样的名字下面附上任务的定义代码typedef struct {VOID*stackPointer;/**< Task stack pointer */ //内核态
任务or线程?
经过分析take_manager代码,我们发现任务的出现常常伴随着线程,任务池的工作和线程的工作原理有一定的相似度,我们今天分析一下这两者的区别。
鸿蒙中任务就是一种线程,二者本质上没有区别,只是在不同的应用环境下有不一样的名字
下面附上任务的定义代码
typedef struct {
VOID *stackPointer; /**< Task stack pointer */ //内核态栈指针,SP位置,切换任务时先保存上下文并指向TaskContext位置
UINT16 taskStatus; /**< Task status */ //各种状态标签,可以拥有多种标签,按位标识
UINT16 priority; /**< Task priority */ //任务优先级[0:31],默认是31级
UINT16 policy; //任务的调度方式(三种 .. LOS_SCHED_RR )
UINT16 timeSlice; /**< Remaining time slice *///剩余时间片
UINT32 stackSize; /**< Task stack size */ //非用户模式下栈大小
UINTPTR topOfStack; /**< Task stack top */ //非用户模式下的栈顶 bottom = top + size
UINT32 taskID; /**< Task ID */ //任务ID,任务池本质是一个大数组,ID就是数组的索引,默认 < 128
TSK_ENTRY_FUNC taskEntry; /**< Task entrance function */ //任务执行入口函数
VOID *joinRetval; /**< pthread adaption */ //用来存储join线程的返回值
VOID *taskSem; /**< Task-held semaphore */ //task在等哪个信号量
VOID *taskMux; /**< Task-held mutex */ //task在等哪把锁
VOID *taskEvent; /**< Task-held event */ //task在等哪个事件
UINTPTR args[4]; /**< Parameter, of which the maximum number is 4 */ //入口函数的参数 例如 main (int argc,char *argv[])
CHAR taskName[OS_TCB_NAME_LEN]; /**< Task name */ //任务的名称
LOS_DL_LIST pendList; /**< Task pend node */ //如果任务阻塞时就通过它挂到各种阻塞情况的链表上,比如OsTaskWait时
LOS_DL_LIST threadList; /**< thread list */ //挂到所属进程的线程链表上
SortLinkList sortList; /**< Task sortlink node */ //挂到cpu core 的任务执行链表上
UINT32 eventMask; /**< Event mask */ //事件屏蔽
UINT32 eventMode; /**< Event mode */ //事件模式
UINT32 priBitMap; /**< BitMap for recording the change of task priority, //任务在执行过程中优先级会经常变化,这个变量用来记录所有曾经变化
the priority can not be greater than 31 */ //过的优先级,例如 ..01001011 曾经有过 0,1,3,6 优先级
INT32 errorNo; /**< Error Num */
UINT32 signal; /**< Task signal */ //任务信号类型,(SIGNAL_NONE,SIGNAL_KILL,SIGNAL_SUSPEND,SIGNAL_AFFI)
sig_cb sig; //信号控制块,这里用于进程间通讯的信号,类似于 linux singal模块
#if (LOSCFG_KERNEL_SMP == YES)
UINT16 currCpu; /**< CPU core number of this task is running on */ //正在运行此任务的CPU内核号
UINT16 lastCpu; /**< CPU core number of this task is running on last time */ //上次运行此任务的CPU内核号
UINT16 cpuAffiMask; /**< CPU affinity mask, support up to 16 cores */ //CPU亲和力掩码,最多支持16核,亲和力很重要,多核情况下尽量一个任务在一个CPU核上运行,提高效率
UINT32 timerCpu; /**< CPU core number of this task is delayed or pended */ //此任务的CPU内核号被延迟或挂起
#if (LOSCFG_KERNEL_SMP_TASK_SYNC == YES)
UINT32 syncSignal; /**< Synchronization for signal handling */ //用于CPU之间 同步信号
#endif
#if (LOSCFG_KERNEL_SMP_LOCKDEP == YES) //死锁检测开关
LockDep lockDep;
#endif
#if (LOSCFG_KERNEL_SCHED_STATISTICS == YES) //调度统计开关,显然打开这个开关性能会受到影响,鸿蒙默认是关闭的
SchedStat schedStat; /**< Schedule statistics */ //调度统计
#endif
#endif
UINTPTR userArea; //使用区域,由运行时划定,根据运行态不同而不同
UINTPTR userMapBase; //用户模式下的栈底位置
UINT32 userMapSize; /**< user thread stack size ,real size : userMapSize + USER_STACK_MIN_SIZE */
UINT32 processID; /**< Which belong process *///所属进程ID
FutexNode futex; //实现快锁功能
LOS_DL_LIST joinList; /**< join list */ //联结链表,允许任务之间相互释放彼此
LOS_DL_LIST lockList; /**< Hold the lock list */ //拿到了哪些锁链表
UINT32 waitID; /**< Wait for the PID or GID of the child process */ //等待孩子的PID或GID进程
UINT16 waitFlag; /**< The type of child process that is waiting, belonging to a group or parent,
a specific child process, or any child process */
#if (LOSCFG_KERNEL_LITEIPC == YES)
UINT32 ipcStatus; //IPC状态
LOS_DL_LIST msgListHead; //消息队列头结点,上面挂的都是任务要读的消息
BOOL accessMap[LOSCFG_BASE_CORE_TSK_LIMIT];//访问图,指的是task之间是否能访问的标识,LOSCFG_BASE_CORE_TSK_LIMIT 为任务池总数
#endif
} LosTaskCB;
代码定义部分很长,该结构体有一定复杂性。
描述
线程是计算资源竞争的最小单元,线程可以使用或等待CPU、使用内存空间等系统资源,并独立于其它线程运行。
鸿蒙内核每个进程内的线程独立运行、独立调度,当前进程内线程的调度不受其它进程内线程的影响。
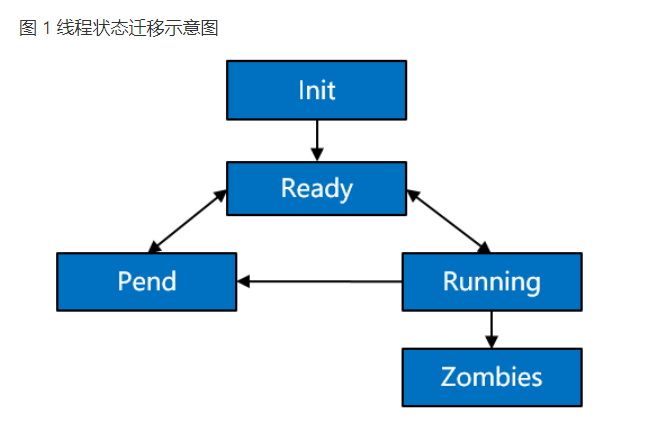
线程的状态说明:
- 初始化(Init):该线程正在被创建。
- 就绪(Ready):该线程在就绪列表中,等待CPU调度。
- 运行(Running):该线程正在运行。
- 阻塞(Blocked):该线程被阻塞挂起。Blocked状态包括:pend(因为锁、事件、信号量等阻塞)、suspend(主动pend)、delay(延时阻塞)、pendtime(因为锁、事件、信号量时间等超时等待)。
- 退出(Exit):该线程运行结束,等待父线程回收其控制块资源。
这里的任务和线程概念已经没什么区别,主要是不同情况下的称谓不同而已。
OpenHarmony LiteOS-M的任务模块可以给用户提供多个任务,实现任务间的切换,帮助用户管理业务程序流程。任务模块具有如下特性:
- 支持多任务。
- 一个任务表示一个线程。
- 抢占式调度机制,高优先级的任务可打断低优先级任务,低优先级任务必须在高优先级任务阻塞或结束后才能得到调度。
- 相同优先级任务支持时间片轮转调度方式。
- 共有32个优先级[0-31],最高优先级为0,最低优先级为31。
任务相关概念
任务状态
任务有多种运行状态。系统初始化完成后,创建的任务就可以在系统中竞争一定的资源,由内核进行调度。
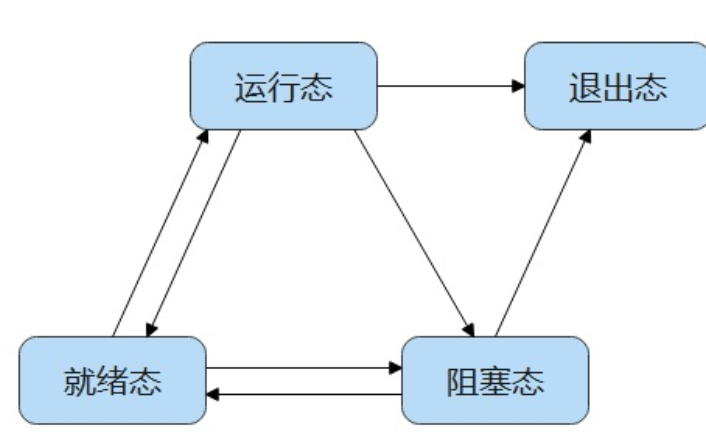
任务状态通常分为以下四种:
- 就绪(Ready):该任务在就绪队列中,只等待CPU。
- 运行(Running):该任务正在执行。
- 阻塞(Blocked):该任务不在就绪队列中。包含任务被挂起(suspend状态)、任务被延时(delay状态)、任务正在等待信号量、读写队列或者等待事件等。
- 退出态(Dead):该任务运行结束,等待系统回收资源。
四种状态的关系
任务相关属性
任务ID
任务ID,在任务创建时通过参数返回给用户,是任务的重要标识。系统中的ID号是唯一的。用户可以通过任务ID对指定任务进行任务挂起、任务恢复、查询任务名等操作。
任务优先级
优先级表示任务执行的优先顺序。任务的优先级决定了在发生任务切换时即将要执行的任务,就绪队列中最高优先级的任务将得到执行。
任务入口函数
新任务得到调度后将执行的函数。该函数由用户实现,在任务创建时,通过任务创建结构体设置。
任务栈
每个任务都拥有一个独立的栈空间,我们称为任务栈。栈空间里保存的信息包含局部变量、寄存器、函数参数、函数返回地址等。
任务上下文
任务在运行过程中使用的一些资源,如寄存器等,称为任务上下文。当这个任务挂起时,其他任务继续执行,可能会修改寄存器等资源中的值。如果任务切换时没有保存任务上下文,可能会导致任务恢复后出现未知错误。因此在任务切换时会将切出任务的任务上下文信息,保存在自身的任务栈中,以便任务恢复后,从栈空间中恢复挂起时的上下文信息,从而继续执行挂起时被打断的代码。
任务控制块TCB
每个任务都含有一个任务控制块(TCB)。TCB包含了任务上下文栈指针(stack pointer)、任务状态、任务优先级、任务ID、任务名、任务栈大小等信息。TCB可以反映出每个任务运行情况。
任务切换
任务切换包含获取就绪队列中最高优先级任务、切出任务上下文保存、切入任务上下文恢复等动作。
任务运行机制
用户创建任务时,系统会初始化任务栈,预置上下文。此外,系统还会将“任务入口函数”地址放在相应位置。这样在任务第一次启动进入运行态时,将会执行“任务入口函数”。

讨论HarmonyOS开发技术,专注于API与组件、DevEco Studio、测试、元服务和应用上架分发等。
更多推荐


 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)