

PCL教程-点云分割之区域生长分割算法
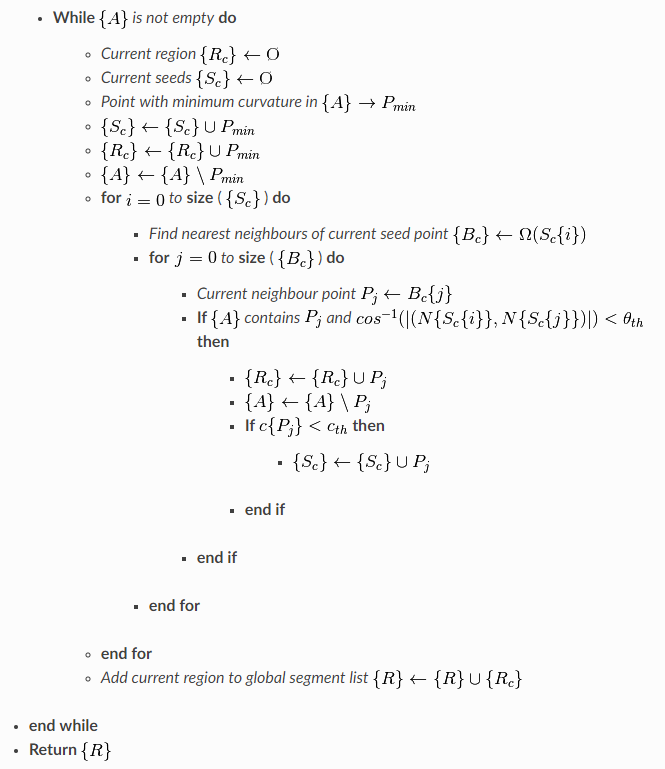
Inputs:Point cloud=Point normals=Points curvatures=Neighbour finding functionCurvature thresholdAngle thresholdInitialize:Region listAvailable points listAlgorithm:Whileis not emptydoCurrent re...
本教程使用到的点云数据:source files
在本篇教程中,我们将学习如何使用由pcl::RegionGrowing类实现的区域生长算法。该算法的目的是合并在平滑约束条件下足够接近的点。因此,该算法的输出数据结构是由聚类组成的数组,其中每个聚类都是被认为是同一光滑表面的一部分的点的集合。该算法的工作原理(光滑度的计算)是基于两点法线之间的角度比较。
目录
基本原理
首先,它根据点的曲率值对点进行排序。需要这样做是因为区域从曲率最小的点开始增长。这样做的原因是曲率最小的点位于平坦区域(从最平坦区域生长可以减少段的总数)。
我们有了分类过的云。直到云中没有未标记点时,算法选取曲率值最小的点,开始区域的增长。这个过程如下所示:
- 选中的点被添加到名为种子的集合中。
- 对于每一个种子点,找到它的邻近点:
- 算出每个相邻点的法线和当前种子点的法线之间的角度,如果角度小于阈值,则将当前点添加到当前区域。
- 然后计算每个邻居点的曲率值,如果曲率小于阈值,那么这个点被添加到种子中。
- 将当前的种子从种子列表中移除。
如果种子列表变成空的,这意味着该区域生长已完成,继续重复上述过程。
区域生长算法: 将具有相似性的点云集合起来构成区域。
首先对每个需要分割的区域找出一个种子点作为生长的起点,然后将种子点周围邻域中与种子有相同或 相似性质的点合并到种子像素所在的区域中。而新的点继续作为种子向四周生长,直到再没有满足条件 的像素可以包括进来,一个区域就生长而成了。
算法流程:
- 计算法线normal 和曲率curvatures,依据曲率升序 排序;
- 选择曲率最低的为初始种子点,种子周围的临近点和 种子点云相比较;
- 设置法线夹角阈值,搜索当前种子点的邻域点,计算邻域点的法线与当前种子点的法线之间的夹角,小于阈值的邻域点加入到当前区域;
- 设置曲率阈值,曲率是否足够小(表面处在同一个弯曲程度),检查每一个邻域点的曲率,小于曲率阈值的邻域点加入到种子点序列中,并删除当前种子点,以新的种子点继续生长;
- 如果满足3,4则该点可用做种子点;
- 如果只满足3,则归类而不做种子;
- 重复进行以上生长过程,直到种子点序列被清空。此时,一个区域生长完成,并将其加入到聚类数组中;
- 对剩余点重复进行以上步骤,直到遍历完所有点。
算法伪代码
输入
- Point cloud =
- Point normals =
- Points curvatures =
- Neighbour finding function
- Curvature threshold
- Angle threshold
初始化
区域列表置为空: Region list
可用的点云列表:Available points list
算法实现
程序代码
#include <iostream>
#include <vector>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/search/search.h>
#include <pcl/search/kdtree.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/filters/passthrough.h>
#include <pcl/segmentation/region_growing.h>
#include <pcl/console/print.h>
#include <pcl/console/parse.h>
#include <pcl/console/time.h>
#include <windows.h>
#include <stdio.h>
#include <psapi.h>
void PrintMemoryInfo( )
{
HANDLE hProcess;
PROCESS_MEMORY_COUNTERS pmc;
hProcess=GetCurrentProcess();
printf( "\nProcess ID: %u\n", hProcess );
// Print information about the memory usage of the process.
//输出进程使用的内存信息
if (NULL == hProcess)
return;
if ( GetProcessMemoryInfo( hProcess, &pmc, sizeof(pmc)) )
{
printf( "\tPageFaultCount: 0x%08X\n", pmc.PageFaultCount );
printf( "\tPeakWorkingSetSize: 0x%08X\n",
pmc.PeakWorkingSetSize );
printf( "\tWorkingSetSize: 0x%08X\n", pmc.WorkingSetSize );
printf( "\tQuotaPeakPagedPoolUsage: 0x%08X\n",
pmc.QuotaPeakPagedPoolUsage );
printf( "\tQuotaPagedPoolUsage: 0x%08X\n",
pmc.QuotaPagedPoolUsage );
printf( "\tQuotaPeakNonPagedPoolUsage: 0x%08X\n",
pmc.QuotaPeakNonPagedPoolUsage );
printf( "\tQuotaNonPagedPoolUsage: 0x%08X\n",
pmc.QuotaNonPagedPoolUsage );
printf( "\tPagefileUsage: 0x%08X\n", pmc.PagefileUsage );
printf( "\tPeakPagefileUsage: 0x%08X\n",
pmc.PeakPagefileUsage );
}
CloseHandle( hProcess );
}
using namespace pcl::console;
int
main (int argc, char** argv)
{
if(argc<2)
{
std::cout<<".exe xx.pcd -kn 50 -bc 0 -fc 10.0 -nc 0 -st 30 -ct 0.05"<<endl;
return 0;
}//如果输入参数小于1个,输出提示
time_t start,end,diff[5],option;
start = time(0);
int KN_normal=50; //设置默认输入参数
bool Bool_Cuting=false;//设置默认输入参数
float far_cuting=10,near_cuting=0,SmoothnessThreshold=30.0,CurvatureThreshold=0.05;//设置默认输入参数
parse_argument (argc, argv, "-kn", KN_normal);
parse_argument (argc, argv, "-bc", Bool_Cuting);
parse_argument (argc, argv, "-fc", far_cuting);
parse_argument (argc, argv, "-nc", near_cuting);
parse_argument (argc, argv, "-st", SmoothnessThreshold);
parse_argument (argc, argv, "-ct", CurvatureThreshold);//设置输入参数方式
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
if ( pcl::io::loadPCDFile <pcl::PointXYZ> (argv[1], *cloud) == -1)
{
std::cout << "Cloud reading failed." << std::endl;
return (-1);
}// 加载输入点云数据
end = time(0);
diff[0] = difftime (end, start);
PCL_INFO ("\Loading pcd file takes(seconds): %d\n", diff[0]);
//Noraml estimation step(1 parameter)
pcl::search::Search<pcl::PointXYZ>::Ptr tree = boost::shared_ptr<pcl::search::Search<pcl::PointXYZ> > (new pcl::search::KdTree<pcl::PointXYZ>);//创建一个指向kd树搜索对象的共享指针
pcl::PointCloud <pcl::Normal>::Ptr normals (new pcl::PointCloud <pcl::Normal>);
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> normal_estimator;//创建法线估计对象
normal_estimator.setSearchMethod (tree);//设置搜索方法
normal_estimator.setInputCloud (cloud);//设置法线估计对象输入点集
normal_estimator.setKSearch (KN_normal);// 设置用于法向量估计的k近邻数目
normal_estimator.compute (*normals);//计算并输出法向量
end = time(0);
diff[1] = difftime (end, start)-diff[0];
PCL_INFO ("\Estimating normal takes(seconds): %d\n", diff[1]);
//optional step: cutting the part are far from the orignal point in Z direction.2 parameters
pcl::IndicesPtr indices (new std::vector <int>);//创建一组索引
if(Bool_Cuting)//判断是否需要直通滤波
{
pcl::PassThrough<pcl::PointXYZ> pass;//设置直通滤波器对象
pass.setInputCloud (cloud);//设置输入点云
pass.setFilterFieldName ("z");//设置指定过滤的维度
pass.setFilterLimits (near_cuting, far_cuting);//设置指定纬度过滤的范围
pass.filter (*indices);//执行滤波,保存滤波结果在上述索引中
}
// 区域生长算法的5个参数
pcl::RegionGrowing<pcl::PointXYZ, pcl::Normal> reg;//创建区域生长分割对象
reg.setMinClusterSize (50);//设置一个聚类需要的最小点数
reg.setMaxClusterSize (1000000);//设置一个聚类需要的最大点数
reg.setSearchMethod (tree);//设置搜索方法
reg.setNumberOfNeighbours (30);//设置搜索的临近点数目
reg.setInputCloud (cloud);//设置输入点云
if(Bool_Cuting)reg.setIndices (indices);//通过输入参数设置,确定是否输入点云索引
reg.setInputNormals (normals);//设置输入点云的法向量
reg.setSmoothnessThreshold (SmoothnessThreshold / 180.0 * M_PI);//设置平滑阈值
reg.setCurvatureThreshold (CurvatureThreshold);//设置曲率阈值
std::vector <pcl::PointIndices> clusters;
reg.extract (clusters);//获取聚类的结果,分割结果保存在点云索引的向量中。
end = time(0);
diff[2] = difftime (end, start)-diff[0]-diff[1];
PCL_INFO ("\Region growing takes(seconds): %d\n", diff[2]);
std::cout << "Number of clusters is equal to " << clusters.size () << std::endl;//输出聚类的数量
std::cout << "First cluster has " << clusters[0].indices.size () << " points." << endl;//输出第一个聚类的数量
std::cout << "These are the indices of the points of the initial" <<
std::endl << "cloud that belong to the first cluster:" << std::endl;
/* int counter = 0;
while (counter < clusters[0].indices.size ())
{
std::cout << clusters[0].indices[counter] << ", ";
counter++;
if (counter % 10 == 0)
std::cout << std::endl;
}
std::cout << std::endl;
*/
PrintMemoryInfo();
pcl::PointCloud <pcl::PointXYZRGB>::Ptr colored_cloud = reg.getColoredCloud ();
pcl::visualization::CloudViewer viewer ("区域增长分割方法");
viewer.showCloud(colored_cloud);
while (!viewer.wasStopped ())
{
}//进行可视化
return (0);
}代码分析
然后设置最小和最大集群大小。这意味着在分割完成后,所有点小于最小值(或大于最大值)的聚类将被丢弃。最小值和最大值的默认值分别为1和“尽可能多”。
算法在内部结构中需要K最近邻搜索,所以这里是提供搜索方法并设置邻居数量的地方。之后,它接收到必须分割的点云、点下标和法线。
pcl::RegionGrowing<pcl::PointXYZ, pcl::Normal> reg;
reg.setMinClusterSize (50);
reg.setMaxClusterSize (1000000);
reg.setSearchMethod (tree);
reg.setNumberOfNeighbours (30);
reg.setInputCloud (cloud);
//reg.setIndices (indices);
reg.setInputNormals (normals);这两行是算法初始化中最重要的部分,因为它们负责上述的平滑约束。第一种方法以弧度为单位设置角度,作为法向偏差的允许范围。如果点之间的法线偏差小于平滑阈值,那么建议它们在同一簇中(新的点-被测试的点-将被添加到簇中)。第二个是曲率阈值。如果两点有一个小的法向偏差,那么它们之间的曲率差被测试。
reg.setSmoothnessThreshold (3.0 / 180.0 * M_PI);
reg.setCurvatureThreshold (1.0);RegionGrowing类提供了一个返回彩色云的方法,其中每个集群都有自己的颜色。因此,在这部分代码中,实例化pcl::visualization::CloudViewer以查看分割的结果——相同颜色的云
pcl::PointCloud <pcl::PointXYZRGB>::Ptr colored_cloud = reg.getColoredCloud ();
pcl::visualization::CloudViewer viewer ("Cluster viewer");
viewer.showCloud(colored_cloud);
while (!viewer.wasStopped ())
{
}
return (0);
}实验结果
原始点云:

使用区域生长算法分割后的点云(每种颜色代表一个聚类):
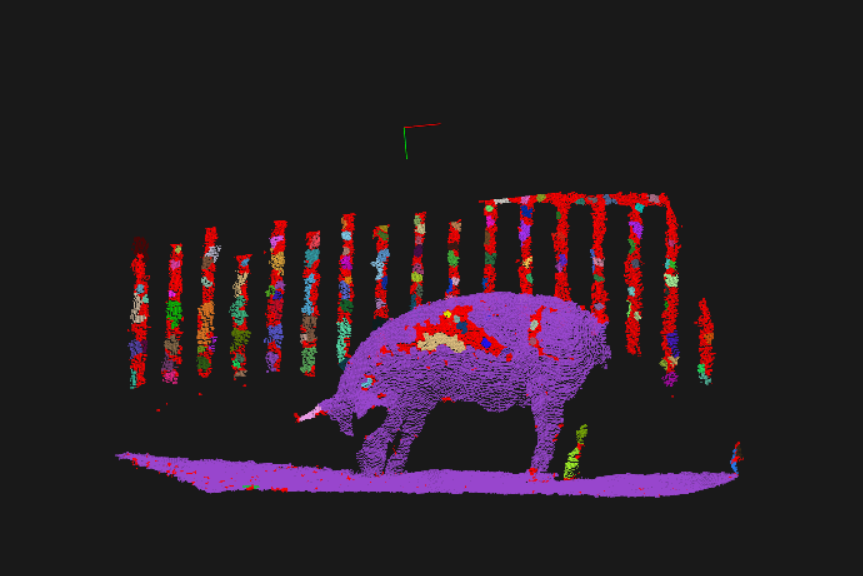
在最后一张图片中,你可以看到彩色云有许多红点。这意味着这些点属于被拒绝的聚类,因为它们有太多/太少的点。
使用命令行进行输入:
D:\PCLProject\pcl-project\pcl_segmentation\4_region_growing_segmentation\cmake_bin\Release>region_growing_segmentation.exe pig1.pcd -kn 50 -bc 0 -fc 10.0 -nc 0 -st 30 -ct 0.05
Loading pcd file takes(seconds): 0
Estimating normal takes(seconds): 1
Region growing takes(seconds): 0
Number of clusters is equal to 141
First cluster has 136600 points.
These are the indices of the points of the initial
cloud that belong to the first cluster:Process ID: 4294967295
PageFaultCount: 0x00004A9E
PeakWorkingSetSize: 0x03A69000
WorkingSetSize: 0x03A68000
QuotaPeakPagedPoolUsage: 0x0002DD40
QuotaPagedPoolUsage: 0x0002D5B8
QuotaPeakNonPagedPoolUsage: 0x00003508
QuotaNonPagedPoolUsage: 0x00003480
PagefileUsage: 0x03427000
PeakPagefileUsage: 0x03427000
其他数据结果
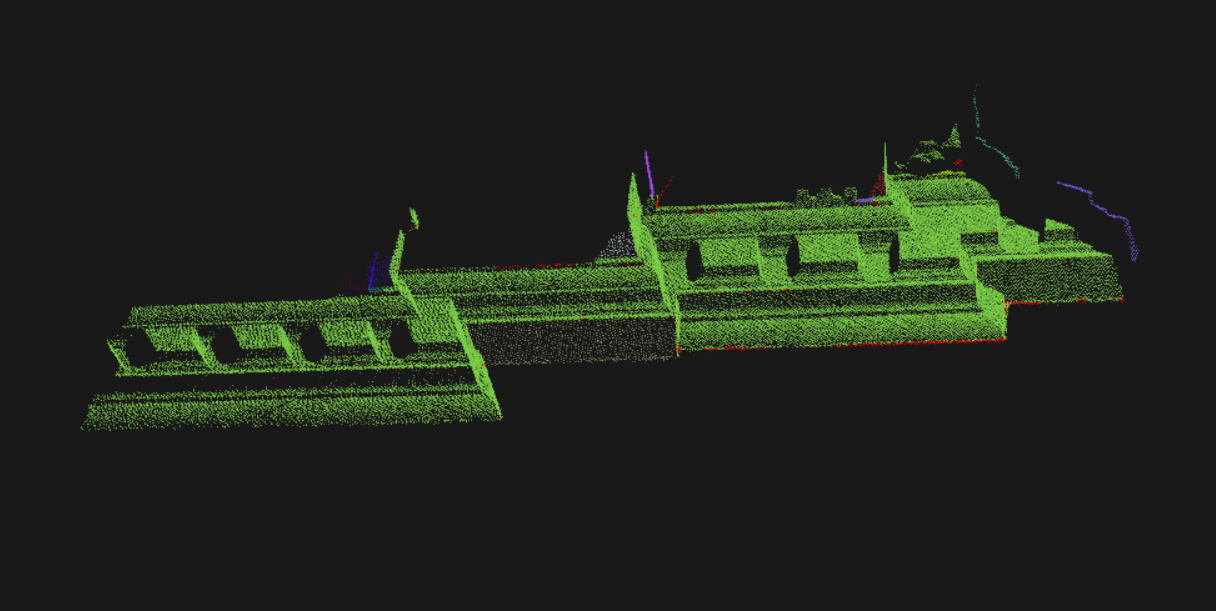
原始点云:
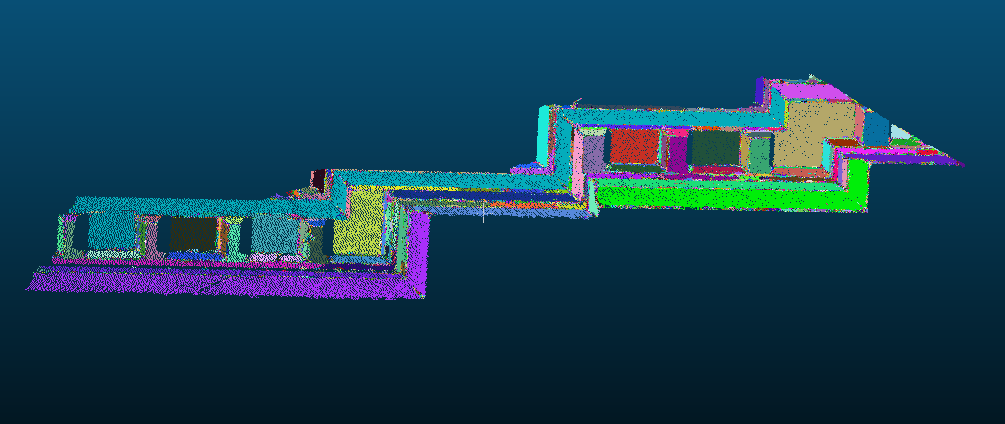
处理之后的点云:

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 16
16 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)