
AGV小车基础知识介绍
AGV基础知识一、AGV的基本概念二、AGV的基本结构硬件组成软件组成1.硬件结构2.单机结构3.主要类型4.主要引导方式介绍5.驱动方式介绍6.AGV的移载方式三、AGV的控制系统1.AGV控制系统2.AGV安全系统3.激光导航控制系统三、AGV的调度系统1.系统架构2.软件架构3.系统功能4.系统应用方向——智能仓储五、AGV充电系统一、AGV的基本概念AGV是自动导引运输车(Automate
AGV基础知识
一、AGV的基本概念
AGV是自动导引运输车(Automated Guided Vehicle)的英文缩写。指装备有电磁学或光学等自动导引装置,能够沿规定的导引路径形式,具有安全保护以及各种移载功能的运输车,AGV是轮式移动机器人的特殊应用。
AGV是一种以电池为动力,装有非接触导引装置的无人驾驶车辆,其主要功能表现为能在计算机监控下,按路径规划和作业要求,精确地行走并停靠到指定地点,完成一系列作业功能。
AGV可广泛应用于机械、电子、化工、冶金、邮电、汽车、机场、码头、造纸、烟草、家电、医药、食品、商业、银行、出版印刷、国防等行业。
在工业4.0的背景下,通过引进AGV动态物流系统、改变现有人工分拣、人工搬运模式,可有效实现分拣中心物流自动化。
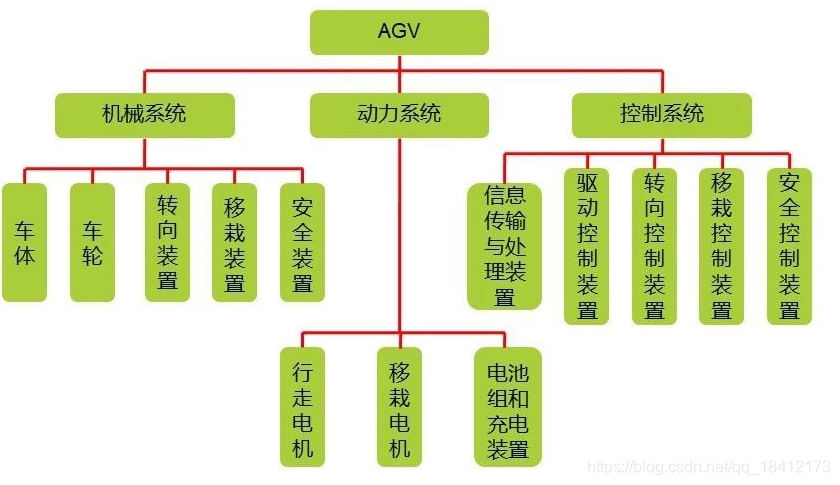
二、AGV的基本结构
硬件组成
1.车载控制器、导航模块、电池模块、障碍物探测模块、报警模块、充电模块、通讯模块、行驶机构。
2.响应上位机控系统指令,在工作区域内行走、停止、移动搬运货架或其他负载。
软件组成
1.控制系统软件
2.通过WIFI或其他传输链路,控制AGV动作。主要控制功能包括:地图管理、路径导航、路径规划、AGV导引控制、资助充电控制、交通管理、任务分配、报警信息管理等。
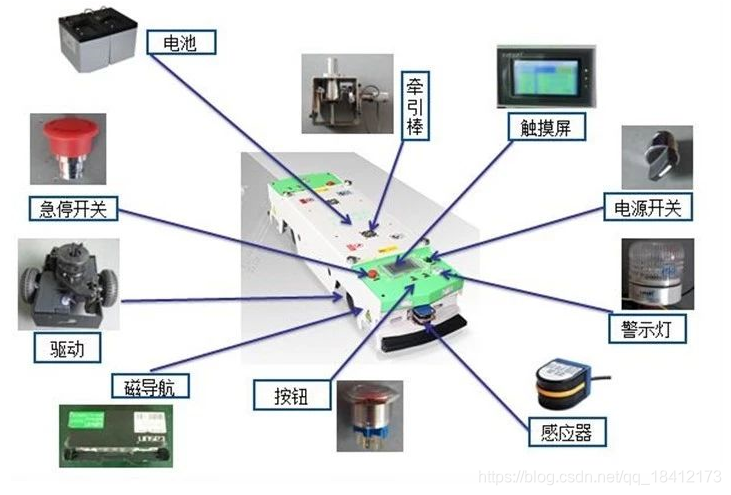
1.硬件结构
2.单机结构
3.主要类型
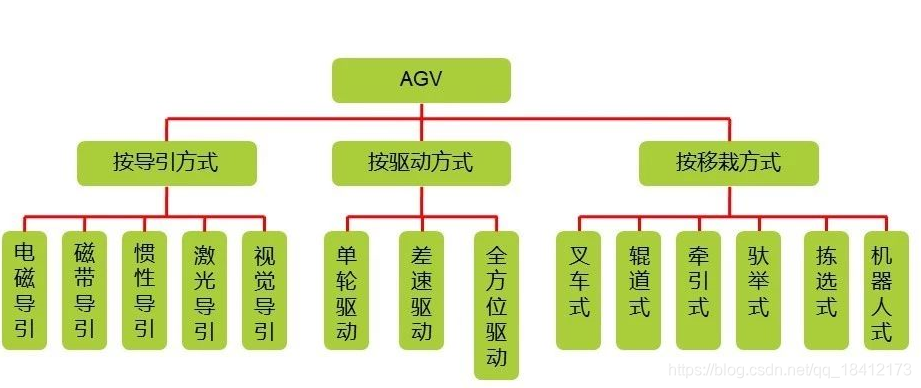
4.主要引导方式介绍
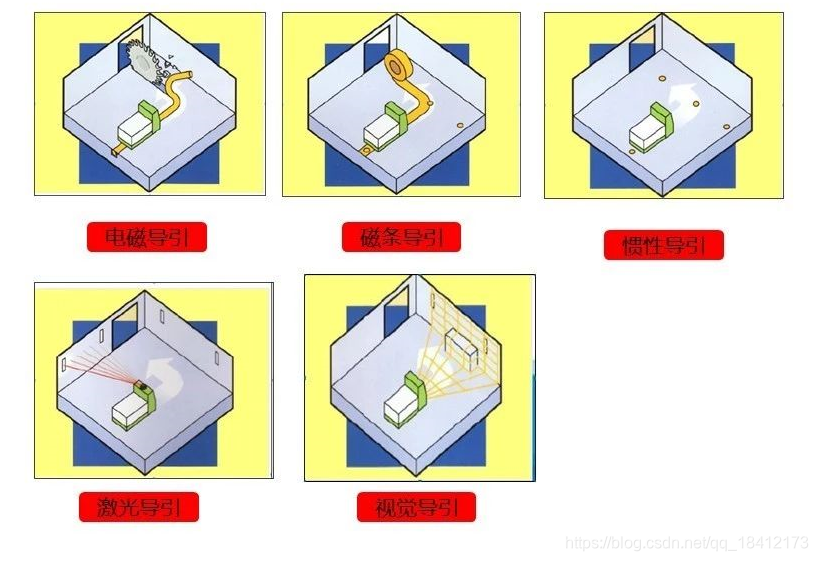
4.1电磁导引
1.电磁导引是较为传统的导引方式之一,目前仍被许多系统采用,它是在AGV的行驶路径上埋设金属线,并在金属线加载导引频率,通过对导引频率的识别来实现AGV的导引。、
2.电磁导引主要优点是引线隐蔽,不容易污染和破话、导引原理简单而可靠,便于控制和通讯,对声光无干扰,制造成本较低。
4.2磁带导引
1.磁带导引技术与电磁导引相近,用在路面上贴磁带代替在地面下埋设金属线,通过磁感应信号实现导引。
2.磁带导引灵活性比较好,改变或扩充路径比较容易,磁带铺设也相对简单,但此导引方式易受环路周围金属物质的干扰,由于磁带外露,易被污染难以避免机械损伤,因此导引的可靠性受外界因素影响较大,适合环境条件较好,地面无金属物质干扰的场合。
4.3惯性导引
1.惯性导引是在AGV上安装陀螺仪,在行驶区域地面上安装定位块,AGV可通过对陀螺仪偏差信号与行走距离编码器的综合计算,及地面定位块信号的比较矫正来正确确定自身的位置和方向,从而实现导引。
2.此项技术在航天和军事上较早运用,其主要优点是技术先进,定位准确性高,灵活性强,便于组合和兼容,适用领域广。
4.4激光导引
1.激光导引有两种模式:一种是在AGV行驶路径的周围安装位置精确的激光发射板,AGV通过发射激光束,同时菜鸡由反射板发射的激光束,来确定其当前的位置和方向,并通过连续的三角几何运算来实现AGV的导引。
2.另一种是自然导引,通过激光测距,结合SLAM算法简历小车的整套行驶路径地图,不需要任何辅助材料,柔性化程度更高,适用于全局部署!
3.激光导引最大的优点是定位精确,地面无需其他定位设施,行驶路径可灵活多变,能够适合多种现场环境,其缺点是,制造成本高,对环境要求相对较高(光线,地面要求,能见度等)。
4.5 视觉导引
视觉导引有两种:一种是,利用摄像头实时采集行驶路径周围环境的图像信息,并与已建立的运行路径周围环境图像数据库中的信息进行比较,实现对AGV的控制。
另一种是,机遇二维码的图像识别方法,利用摄像头扫描地面二维码,通过扫码定位技术实现路径导航。
4.6关于SLAM
1.SLAM指的是机器人在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航。
2.SLAM问题可以面数为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。
定位:机器人必须知道自己在环境中的位置。
建图:机器人必须记录环境中的特征位置。
SLAM:机器人在定位的同时建立环境地图,其基本原理是通过概率统计的方法,进行多特征匹配来达到定位和减少定位误差的。
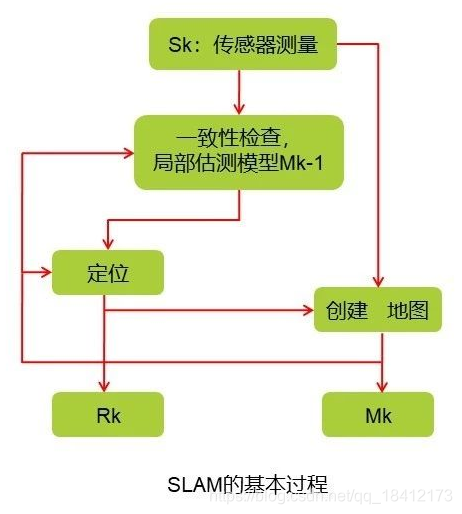
Sk表示传感器测试获取数据,Mk-1表示第K-1时刻的局部地图,Rk表示K时刻机器人的位姿。
5.驱动方式介绍
5.1单轮驱动

5.2差速驱动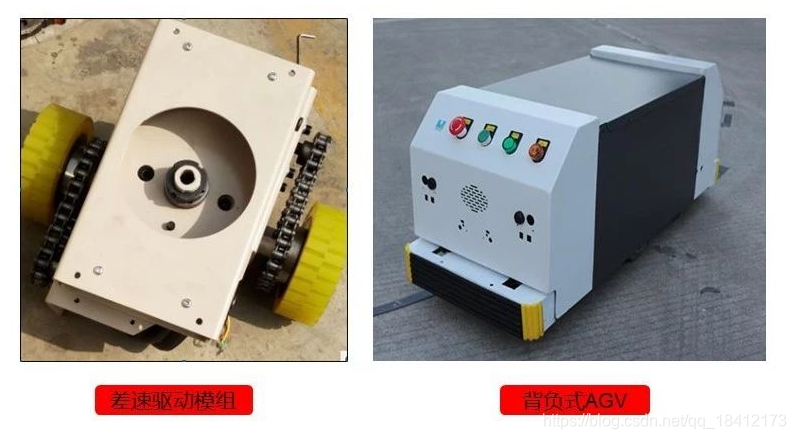
5.3全方位驱动
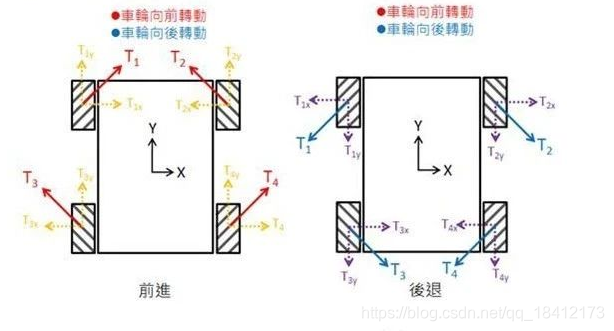
麦克纳姆轮:这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面
麦克纳姆轮的原理
依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量,从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小滚子,故轮子可以横向滑移。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以改轮能够连续地向前滚动。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。有4个这种新型轮子进行组合,可以更灵活方便的实现全方位移动功能。
6.AGV的移载方式

三、AGV的控制系统
1.AGV控制系统
1.1磁导航AGV控制系统
车载控制系统通过对磁导航传感器、RFID地标传感器、漫反射式红外检测传感器、碰撞胶条、面板控制按钮等信号的菜鸡,经过编写好的算法程序计算处理,控制驱动单元、装卸机构。显示屏等执行机构,实现AGV的导航控制、导引控制、装卸控制。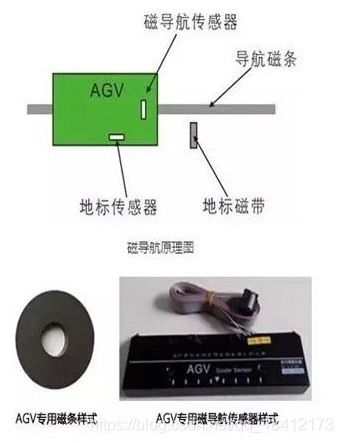

1.3站点号自动识别(RFID)
RFID系统是一种具有广泛应用前景的自动识别系统。基本的射频识别系统由RFID电子标签和读写器构成,电子标签的存储容量高达32K bits。根据射频工作的频段和应用场合的不同,RFID能够识别从几厘米到几十米范围内的电子标签,并且能在运动中实时读取。采用在AGV路径旁放置非接触射频卡,由车载射频卡读卡器实时读取射频卡中存储的加减速、路径编号、工位编号、仓库编号、等待时间等大量信息,能够很好地解决视觉识别特征所带来的实时性,多义性问题。
2.AGV安全系统
AGV的安全系统既要实现对AGV的保护,又要实现对人,或对其它地面设备的保护。其安全保护方法可归纳为两类:接触式和非接触式两种保护系统。
2.1接触式避障系统
2.2非接触式避障系统
目前常见的主要有视觉传感器、激光传感器、红外传感器、超声波传感器等。
1.红外
一般的红外测距都是采用三角测距的原理,红外发射器按照一定角度发射红外光束,遇到物体之后,光会反向回来,检测到反射光之后,通过结构上的几何三角关系,就可以计算出物体距离D。
2.激光
激光测距传感器利用激光来测量到被测物体的距离或者被测物体的位移等参数。比较常用的测距方法是由脉冲激光器发出持续时间极短的脉冲激光,经过待测距离厚射到被测目标,回波返回,由光电探测器接收。根据主波信号和回波信号之间的间隔,即激光脉冲从激光器到被测目标之间的往返时间,就可以算出待测目标的距离。由于光速很快,是的在测小距离时光束往返时间极短,因此这种方法不适合测量精度要求很高的距离,一般若要求精度非常高,常用三角法,相位法等。
2.3安全系统
采用激光障碍物传感器和雷达扫描仪组成安全防护装置,确保运行安全。规定范围内检测到障碍物体进入危险区域时AGV自动停车,障碍物移走后自动恢复运行。
AGV小车前面设有接触式传感器——保险杠,当保险杠与障碍物发生碰撞,AGV会停车保护,障碍物移走后自动恢复运行。
AGV小车具有离线保护、偏离轨道自动纠正功能。
3.激光导航控制系统
AGV的控制系统主要可分为两部分:地面控制系统和车载控制系统。
1.地面控制系统即地面固定设备,主要负责任务的分配,车辆调度,交通管理,电池充电等功能。
2.车载控制系统即车载移动设备,在收到上位机系统的指令后,负责AGV的引导,路径选择,小车行走,装卸操作等。
系统结构示意图如下: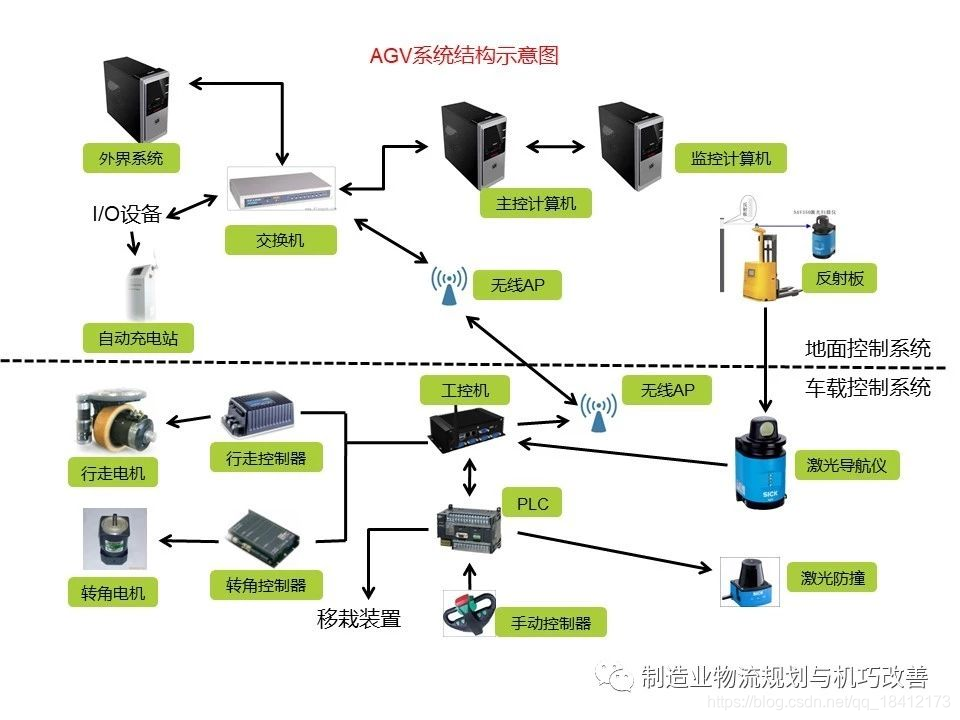
AGV系统运行模式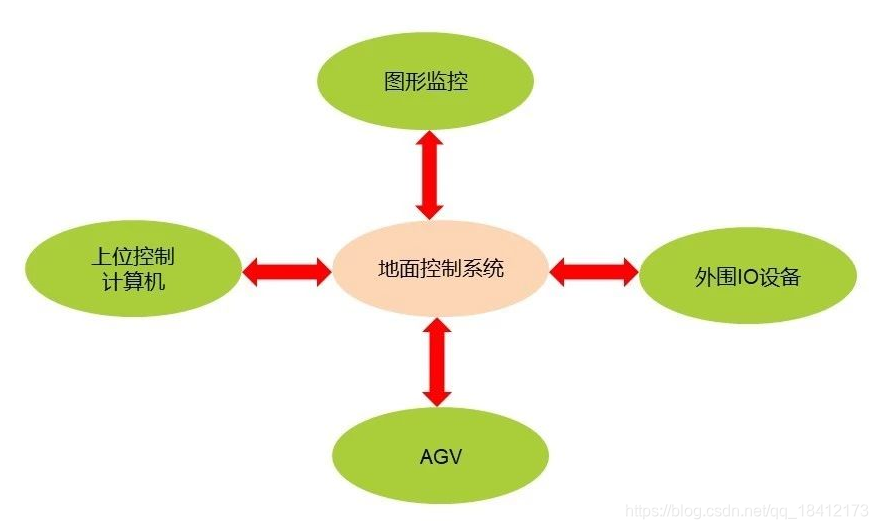
1.AGV地面控制系统接收上位机发出的任务启动命令后,启动相应的物料搬运任务
2.车辆管理根据AGV的任务执行情况调度AGV执行任务,并通过无线电将命令发送到AGV
3.AGV随时报告车辆位置、状态信息及任务执行信息
4.交通管理根据各AGV的位置,确认每一辆AGV下一步应该走的路径
5.任务管理根据AGV任务执行信息报告上位控制计算机
6.地面控制系统在必要时使用输入输出模块控制外围设备
7.地面控制系统把各种AGV系统的运行状态发送给图形监控系统,图形监控系统使用这些运行状态构建各种监控界面,供系统维护人员使用。
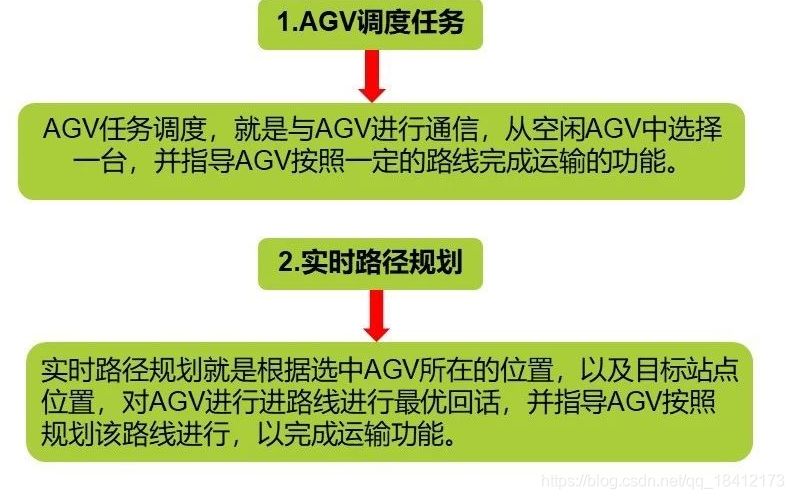
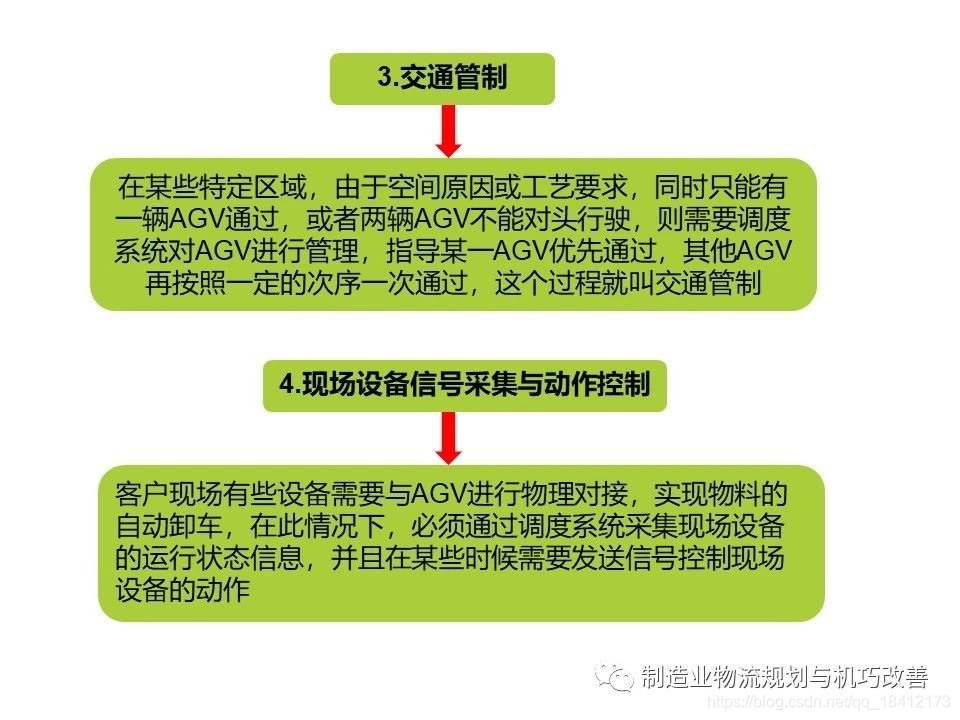
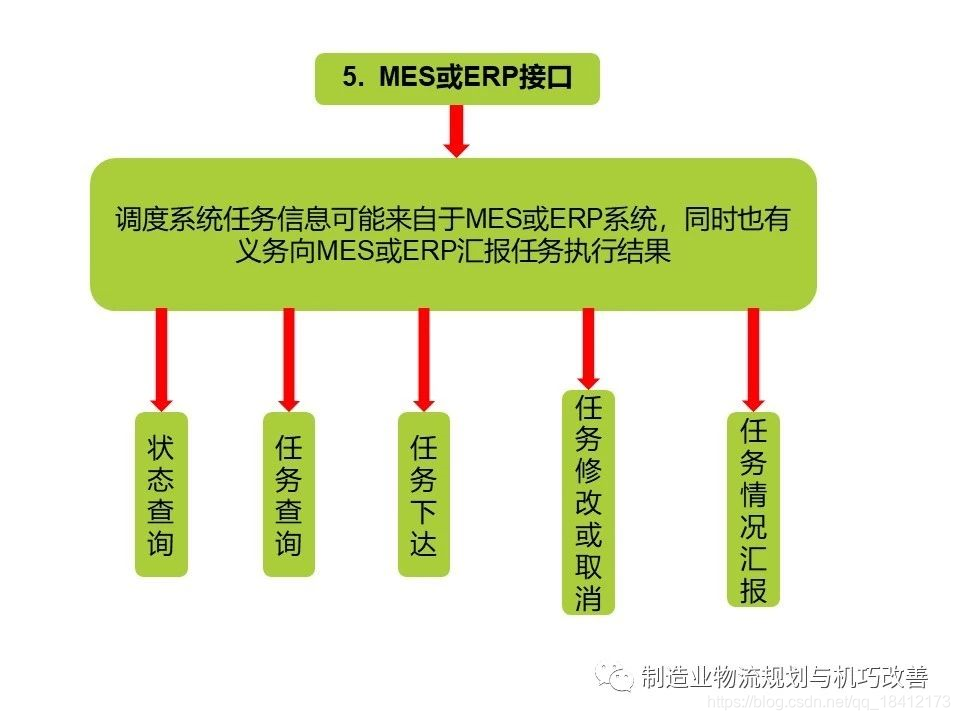
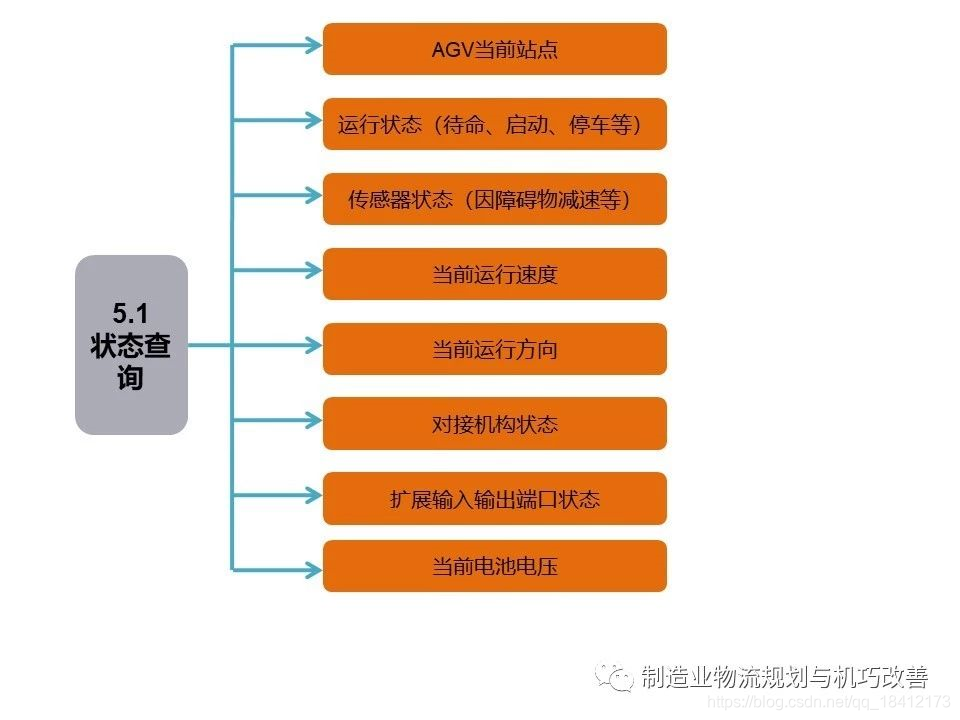
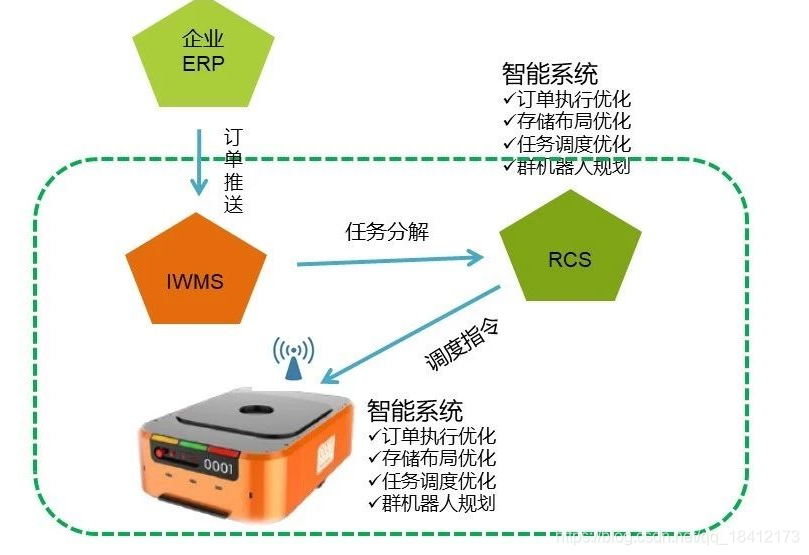
三、AGV的调度系统
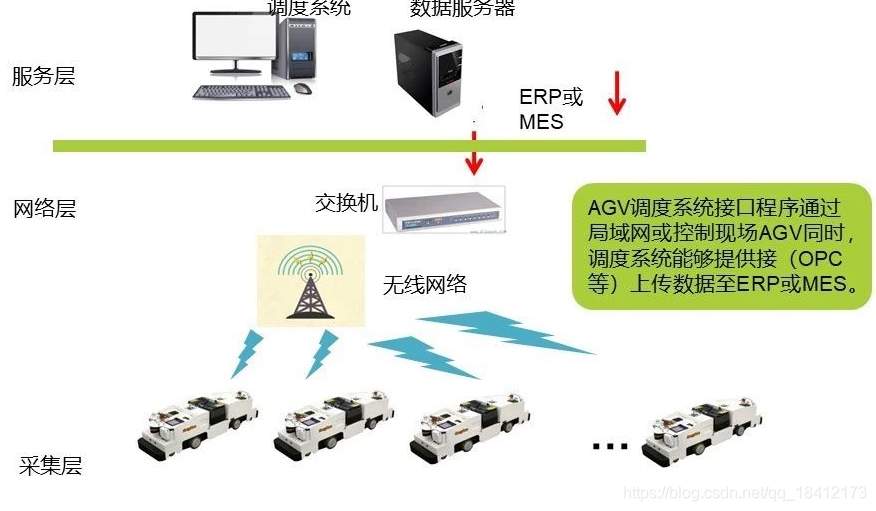
1.系统架构
2.软件架构
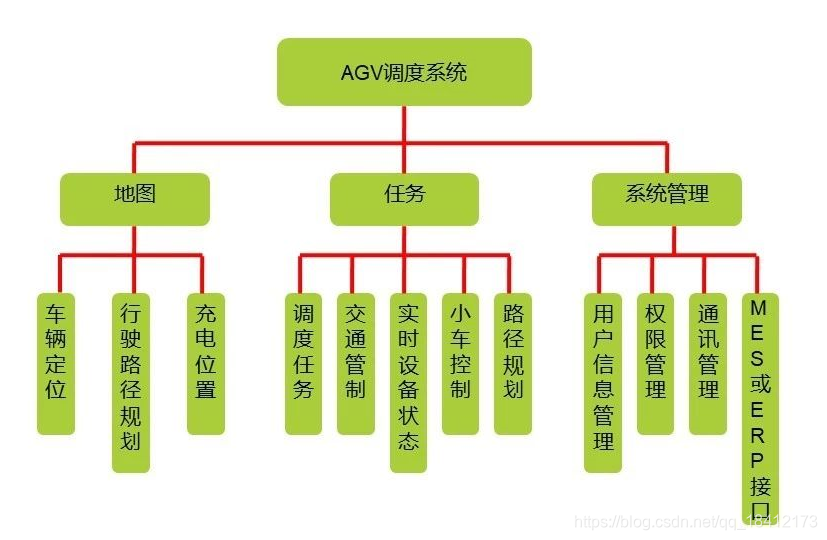
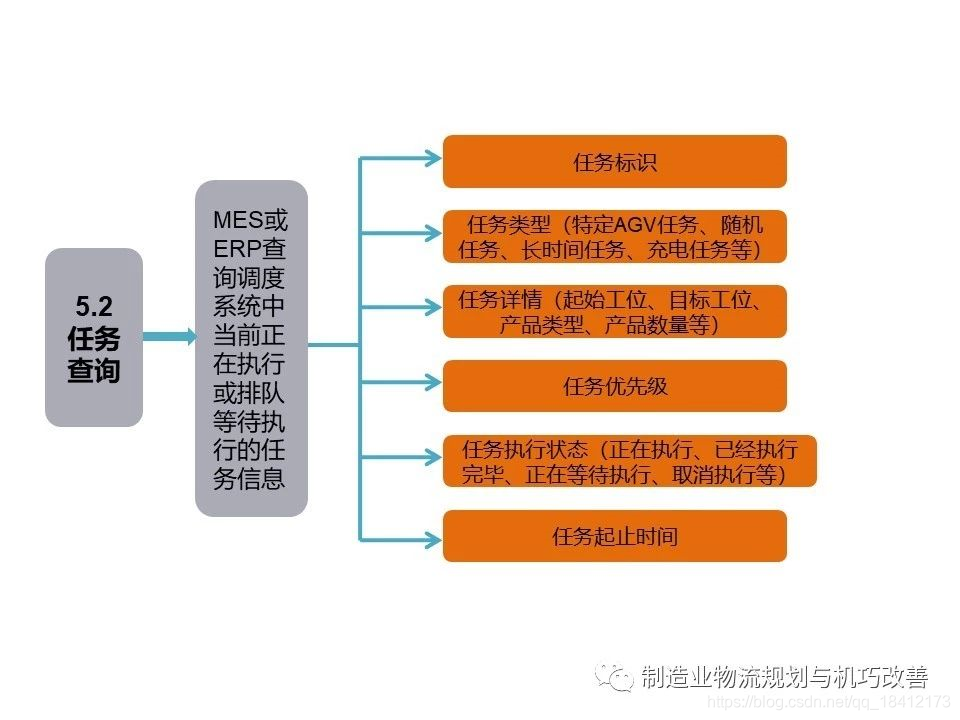
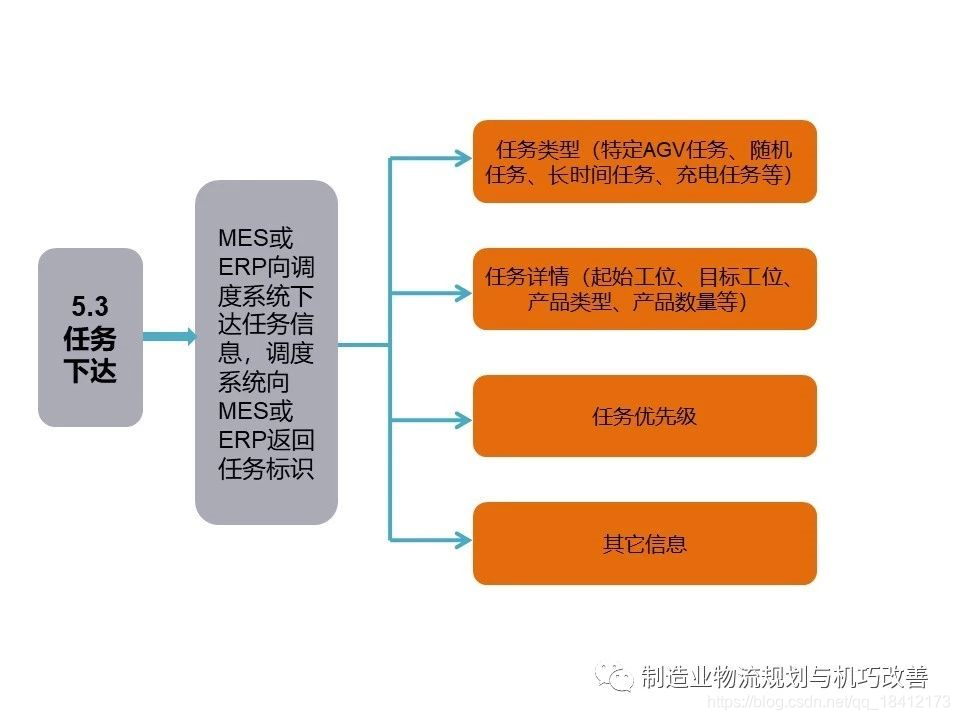
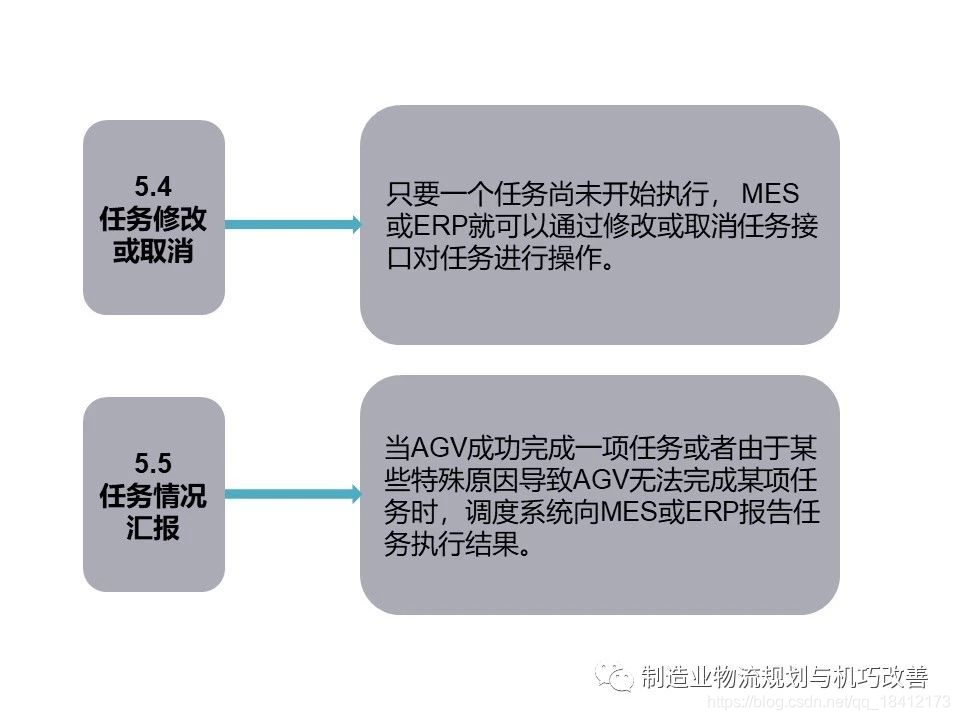
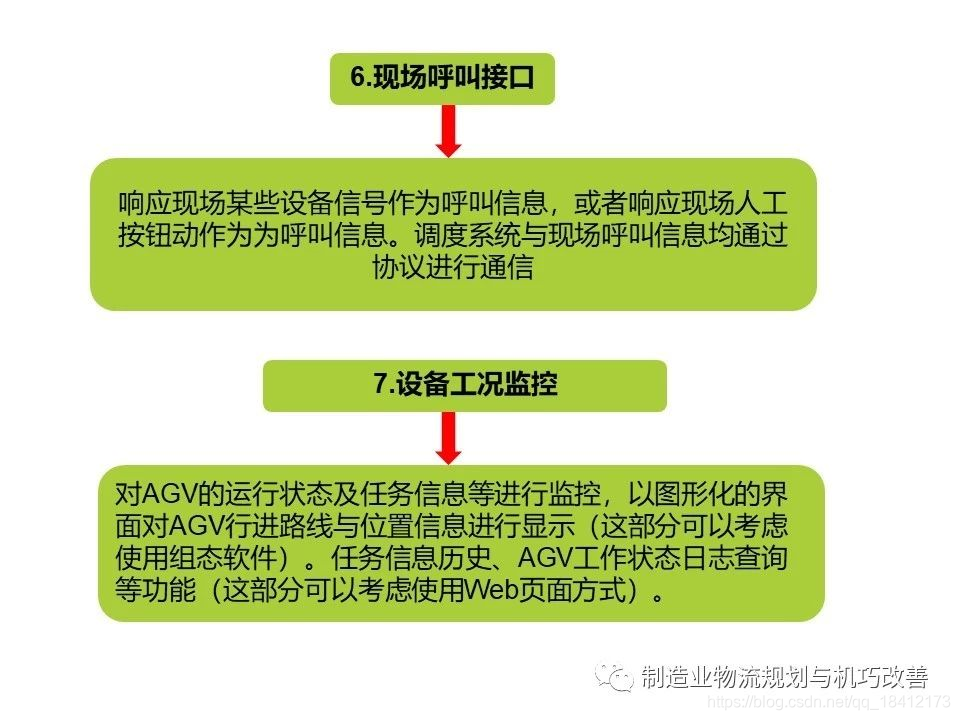
3.系统功能
4.系统应用方向——智能仓储

智能机器人仓储系统的优点
1.适用于多品种、小订单分拣需求的仓储作业环境、电商分拣中心、物流仓库、制造业原料仓库、3C制造业、烟草、医疗、服务、服装、食品、汽车制造等行业。
2.该系统以“货到人”的理念为核心,将仓库分为“无人区”与“工作区”两大区域。入库与出库员工只需在工作台操作终端就可以实现物料的准确入库与出库。
3.可实现仓储作业的单据和数据全过程监控,并提供仓储作业工作和效率的统计分析。
五、AGV充电系统
1.在线自动充电系统由地面充电机、AGV电量检测装置和充电管理系统构成。
2.AGV使用镍铬电池作为供电电源,通过自带的电量表检查并显示剩余电量。当电量不足时,AGV向控制台申请充电,并自动行驶到固定的充电位置。地面设置有充电连接器,AGV上装有车载充电连接器。AGV行驶到位后,两个连接器滑动接触,实现AGV自动充电。当没有AGV到达时,地面充电连接器不带电。在线充电需要根据生产工艺路线,规划充电站点的位置并进行相应的地面布线施工。
3.在AGV运行路线的充电位置上安装有地面充电连接器,在AGV车底部装有与之配套的充电连接器AGV运行到充电位置后,AGV充电连接器与地面充电连接器的充电滑动触板连接。
4.充电电池
铅酸电池
镍铬电池
镍氢电池
锂离子电池:碳酸锂、磷酸铁锂
特别说明:此文章素材来自智能制造之家,伺服与运动控制,仅做学习分享使用。
更多推荐

 111
111 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)