
VS2019下PCL1.11.1的安装配置
VS2019下PCL的安装配置下载安装配置VS2019配置测试本文参考了在windows10 vs2019下安装使用PCL下载前往Github下选择最新的PCL包,我选择的PCL1.11.1https://github.com/PointCloudLibrary/pcl/releases要下载Allinone以及pdb安装安装首先点击Allinone.exe,如图进行选择这个版本自动安装,Open
本文参考了 在windows10 vs2019下安装使用PCL
下载
前往Github下选择最新的PCL包,我选择的PCL1.11.1
https://github.com/PointCloudLibrary/pcl/releases
要下载Allinone以及pdb

安装
安装首先点击Allinone.exe,如图进行选择


这个版本自动安装,OpenNI自动写入C盘
配置
打开 我的电脑->属性->高级系统设置->高级->环境变量
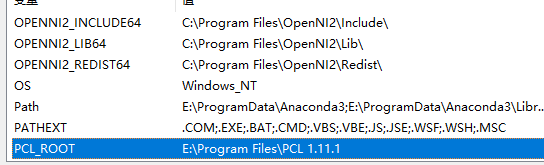
你会发现系统变量中已经自动有写入了PCL和OpenNI
接下来进行path的配置,双击Path,新建,写入如下内容

%PCL_ROOT%\bin
%PCL_ROOT%\3rdParty\VTK\bin
%PCL_ROOT%\3rdParty\FLANN\bin
%OPENNI2_REDIST64%
%PCL_ROOT%\3rdParty\Qhull\bin
C:\Program Files\OpenNI2\Tools
%OPENNI2_LIB64%
%OPENNI2_INCLUDE64%
VS2019配置
1、打开 VS2019创建一个空项目

并且选择Debug x64
2、编辑项目属性

3、看到里面的界面,先把SDL检查关闭

4、
符合模式改掉

**
配置包含目录,其中填入对应的路径,我的是:
C:\Program Files\OpenNI2\Include
E:\Program Files\PCL 1.11.1\include\pcl-1.11
E:\Program Files\PCL 1.11.1\3rdParty\VTK\include\vtk-8.2
E:\Program Files\PCL 1.11.1\3rdParty\Qhull\include
E:\Program Files\PCL 1.11.1\3rdParty\FLANN\include
E:\Program Files\PCL 1.11.1\3rdParty\Eigen\eigen3
E:\Program Files\PCL 1.11.1\3rdParty\Boost\include\boost-1_74

配置lib目录

C:\Program Files\OpenNI2\Lib
E:\Program Files\PCL 1.11.1\lib
E:\Program Files\PCL 1.11.1\3rdParty\VTK\lib
E:\Program Files\PCL 1.11.1\3rdParty\FLANN\lib
E:\Program Files\PCL 1.11.1\3rdParty\Qhull\lib
E:\Program Files\PCL 1.11.1\3rdParty\Boost\lib
接下来是附加依赖项

需要注意_d后缀的是debug下的配置,最好不要在release中配置,否则会出现很多异常,这是因为调用库的时候是按照顺序来调,debug库的名称写在release库的前面会默认调用debug库。
Release版(就是把安装目录下的所有没有debug的lib都扔进去。)(尽量别配置了)
pcl_common_release.lib
pcl_features_release.lib
pcl_filters_release.lib
pcl_io_ply_release.lib
pcl_io_release.lib
pcl_kdtree_release.lib
pcl_keypoints_release.lib
pcl_ml_release.lib
pcl_octree_release.lib
pcl_outofcore_release.lib
pcl_people_release.lib
pcl_recognition_release.lib
pcl_registration_release.lib
pcl_sample_consensus_release.lib
pcl_search_release.lib
pcl_segmentation_release.lib
pcl_stereo_release.lib
pcl_surface_release.lib
pcl_tracking_release.lib
pcl_visualization_release.lib
vtkalglib-8.2.lib
vtkChartsCore-8.2.lib
vtkCommonColor-8.2.lib
vtkCommonComputationalGeometry-8.2.lib
vtkCommonCore-8.2.lib
vtkCommonDataModel-8.2.lib
vtkCommonExecutionModel-8.2.lib
vtkCommonMath-8.2.lib
vtkCommonMisc-8.2.lib
vtkCommonSystem-8.2.lib
vtkCommonTransforms-8.2.lib
vtkDICOMParser-8.2.lib
vtkDomainsChemistry-8.2.lib
vtkexoIIc-8.2.lib
vtkexpat-8.2.lib
vtkFiltersAMR-8.2.lib
vtkFiltersCore-8.2.lib
vtkFiltersExtraction-8.2.lib
vtkFiltersFlowPaths-8.2.lib
vtkFiltersGeneral-8.2.lib
vtkFiltersGeneric-8.2.lib
vtkFiltersGeometry-8.2.lib
vtkFiltersHybrid-8.2.lib
vtkFiltersHyperTree-8.2.lib
vtkFiltersImaging-8.2.lib
vtkFiltersModeling-8.2.lib
vtkFiltersParallel-8.2.lib
vtkFiltersParallelImaging-8.2.lib
vtkFiltersPoints-8.2.lib
vtkFiltersProgrammable-8.2.lib
vtkFiltersSelection-8.2.lib
vtkFiltersSMP-8.2.lib
vtkFiltersSources-8.2.lib
vtkFiltersStatistics-8.2.lib
vtkFiltersTexture-8.2.lib
vtkFiltersTopology-8.2.lib
vtkFiltersVerdict-8.2.lib
vtkfreetype-8.2.lib
vtkGeovisCore-8.2.lib
vtkgl2ps-8.2.lib
vtkhdf5-8.2.lib
vtkhdf5_hl-8.2.lib
vtkImagingColor-8.2.lib
vtkImagingCore-8.2.lib
vtkImagingFourier-8.2.lib
vtkImagingGeneral-8.2.lib
vtkImagingHybrid-8.2.lib
vtkImagingMath-8.2.lib
vtkImagingMorphological-8.2.lib
vtkImagingSources-8.2.lib
vtkImagingStatistics-8.2.lib
vtkImagingStencil-8.2.lib
vtkInfovisCore-8.2.lib
vtkInfovisLayout-8.2.lib
vtkInteractionImage-8.2.lib
vtkInteractionStyle-8.2.lib
vtkInteractionWidgets-8.2.lib
vtkIOAMR-8.2.lib
vtkIOCore-8.2.lib
vtkIOEnSight-8.2.lib
vtkIOExodus-8.2.lib
vtkIOExport-8.2.lib
vtkIOExportOpenGL-8.2.lib
vtkIOGeometry-8.2.lib
vtkIOImage-8.2.lib
vtkIOImport-8.2.lib
vtkIOInfovis-8.2.lib
vtkIOLegacy-8.2.lib
vtkIOLSDyna-8.2.lib
vtkIOMINC-8.2.lib
vtkIOMovie-8.2.lib
vtkIONetCDF-8.2.lib
vtkIOParallel-8.2.lib
vtkIOParallelXML-8.2.lib
vtkIOPLY-8.2.lib
vtkIOSQL-8.2.lib
vtkIOTecplotTable-8.2.lib
vtkIOVideo-8.2.lib
vtkIOXML-8.2.lib
vtkIOXMLParser-8.2.lib
vtkjpeg-8.2.lib
vtkjsoncpp-8.2.lib
vtklibharu-8.2.lib
vtklibxml2-8.2.lib
vtklz4-8.2.lib
vtkmetaio-8.2.lib
vtkNetCDF-8.2.lib
vtknetcdfcpp-8.2.lib
vtkoggtheora-8.2.lib
vtkParallelCore-8.2.lib
vtkpng-8.2.lib
vtkproj4-8.2.lib
vtkRenderingAnnotation-8.2.lib
vtkRenderingContext2D-8.2.lib
vtkRenderingContextOpenGL-8.2.lib
vtkRenderingCore-8.2.lib
vtkRenderingFreeType-8.2.lib
vtkRenderingGL2PS-8.2.lib
vtkRenderingImage-8.2.lib
vtkRenderingLabel-8.2.lib
vtkRenderingLIC-8.2.lib
vtkRenderingLOD-8.2.lib
vtkRenderingOpenGL-8.2.lib
vtkRenderingVolume-8.2.lib
vtkRenderingVolumeOpenGL-8.2.lib
vtksqlite-8.2.lib
vtksys-8.2.lib
vtktiff-8.2.lib
vtkverdict-8.2.lib
vtkViewsContext2D-8.2.lib
vtkViewsCore-8.2.lib
vtkViewsInfovis-8.2.lib
vtkzlib-8.2.lib
Debug版(就是把安装目录下的所有没有release的lib都扔进去。)见下表
pcl_commond.lib
pcl_featuresd.lib
pcl_filtersd.lib
pcl_iod.lib
pcl_io_plyd.lib
pcl_kdtreed.lib
pcl_keypointsd.lib
pcl_mld.lib
pcl_octreed.lib
pcl_outofcored.lib
pcl_peopled.lib
pcl_recognitiond.lib
pcl_registrationd.lib
pcl_sample_consensusd.lib
pcl_searchd.lib
pcl_segmentationd.lib
pcl_stereod.lib
pcl_surfaced.lib
pcl_trackingd.lib
pcl_visualizationd.lib
vtkChartsCore-8.2-gd.lib
vtkCommonColor-8.2-gd.lib
vtkCommonComputationalGeometry-8.2-gd.lib
vtkCommonCore-8.2-gd.lib
vtkCommonDataModel-8.2-gd.lib
vtkCommonExecutionModel-8.2-gd.lib
vtkCommonMath-8.2-gd.lib
vtkCommonMisc-8.2-gd.lib
vtkCommonSystem-8.2-gd.lib
vtkCommonTransforms-8.2-gd.lib
vtkDICOMParser-8.2-gd.lib
vtkDomainsChemistry-8.2-gd.lib
vtkDomainsChemistryOpenGL2-8.2-gd.lib
vtkdoubleconversion-8.2-gd.lib
vtkexodusII-8.2-gd.lib
vtkexpat-8.2-gd.lib
vtkFiltersAMR-8.2-gd.lib
vtkFiltersCore-8.2-gd.lib
vtkFiltersExtraction-8.2-gd.lib
vtkFiltersFlowPaths-8.2-gd.lib
vtkFiltersGeneral-8.2-gd.lib
vtkFiltersGeneric-8.2-gd.lib
vtkFiltersGeometry-8.2-gd.lib
vtkFiltersHybrid-8.2-gd.lib
vtkFiltersHyperTree-8.2-gd.lib
vtkFiltersImaging-8.2-gd.lib
vtkFiltersModeling-8.2-gd.lib
vtkFiltersParallel-8.2-gd.lib
vtkFiltersParallelImaging-8.2-gd.lib
vtkFiltersPoints-8.2-gd.lib
vtkFiltersProgrammable-8.2-gd.lib
vtkFiltersSelection-8.2-gd.lib
vtkFiltersSMP-8.2-gd.lib
vtkFiltersSources-8.2-gd.lib
vtkFiltersStatistics-8.2-gd.lib
vtkFiltersTexture-8.2-gd.lib
vtkFiltersTopology-8.2-gd.lib
vtkFiltersVerdict-8.2-gd.lib
vtkfreetype-8.2-gd.lib
vtkGeovisCore-8.2-gd.lib
vtkgl2ps-8.2-gd.lib
vtkglew-8.2-gd.lib
vtkGUISupportMFC-8.2-gd.lib
vtkhdf5-8.2-gd.lib
vtkhdf5_hl-8.2-gd.lib
vtkImagingColor-8.2-gd.lib
vtkImagingCore-8.2-gd.lib
vtkImagingFourier-8.2-gd.lib
vtkImagingGeneral-8.2-gd.lib
vtkImagingHybrid-8.2-gd.lib
vtkImagingMath-8.2-gd.lib
vtkImagingMorphological-8.2-gd.lib
vtkImagingSources-8.2-gd.lib
vtkImagingStatistics-8.2-gd.lib
vtkImagingStencil-8.2-gd.lib
vtkInfovisCore-8.2-gd.lib
vtkInfovisLayout-8.2-gd.lib
vtkInteractionImage-8.2-gd.lib
vtkInteractionStyle-8.2-gd.lib
vtkInteractionWidgets-8.2-gd.lib
vtkIOAMR-8.2-gd.lib
vtkIOAsynchronous-8.2-gd.lib
vtkIOCityGML-8.2-gd.lib
vtkIOCore-8.2-gd.lib
vtkIOEnSight-8.2-gd.lib
vtkIOExodus-8.2-gd.lib
vtkIOExport-8.2-gd.lib
vtkIOExportOpenGL2-8.2-gd.lib
vtkIOExportPDF-8.2-gd.lib
vtkIOGeometry-8.2-gd.lib
vtkIOImage-8.2-gd.lib
vtkIOImport-8.2-gd.lib
vtkIOInfovis-8.2-gd.lib
vtkIOLegacy-8.2-gd.lib
vtkIOLSDyna-8.2-gd.lib
vtkIOMINC-8.2-gd.lib
vtkIOMovie-8.2-gd.lib
vtkIONetCDF-8.2-gd.lib
vtkIOParallel-8.2-gd.lib
vtkIOParallelXML-8.2-gd.lib
vtkIOPLY-8.2-gd.lib
vtkIOSegY-8.2-gd.lib
vtkIOSQL-8.2-gd.lib
vtkIOTecplotTable-8.2-gd.lib
vtkIOVeraOut-8.2-gd.lib
vtkIOVideo-8.2-gd.lib
vtkIOXML-8.2-gd.lib
vtkIOXMLParser-8.2-gd.lib
vtkjpeg-8.2-gd.lib
vtkjsoncpp-8.2-gd.lib
vtklibharu-8.2-gd.lib
vtklibxml2-8.2-gd.lib
vtklz4-8.2-gd.lib
vtklzma-8.2-gd.lib
vtkmetaio-8.2-gd.lib
vtkNetCDF-8.2-gd.lib
vtkogg-8.2-gd.lib
vtkParallelCore-8.2-gd.lib
vtkpng-8.2-gd.lib
vtkproj-8.2-gd.lib
vtkpugixml-8.2-gd.lib
vtkRenderingAnnotation-8.2-gd.lib
vtkRenderingContext2D-8.2-gd.lib
vtkRenderingContextOpenGL2-8.2-gd.lib
vtkRenderingCore-8.2-gd.lib
vtkRenderingExternal-8.2-gd.lib
vtkRenderingFreeType-8.2-gd.lib
vtkRenderingGL2PSOpenGL2-8.2-gd.lib
vtkRenderingImage-8.2-gd.lib
vtkRenderingLabel-8.2-gd.lib
vtkRenderingLOD-8.2-gd.lib
vtkRenderingOpenGL2-8.2-gd.lib
vtkRenderingVolume-8.2-gd.lib
vtkRenderingVolumeOpenGL2-8.2-gd.lib
vtksqlite-8.2-gd.lib
vtksys-8.2-gd.lib
vtktheora-8.2-gd.lib
vtktiff-8.2-gd.lib
vtkverdict-8.2-gd.lib
vtkViewsContext2D-8.2-gd.lib
vtkViewsCore-8.2-gd.lib
vtkViewsInfovis-8.2-gd.lib
vtkzlib-8.2-gd.lib
测试
全部完成后请进行测试
#include <iostream>
#include <vector>
#include <ctime>
#include <pcl/point_cloud.h>
#include <pcl/octree/octree.h>
#include <boost/thread/thread.hpp>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std;
int
main(int argc, char** argv)
{
srand((unsigned int)time(NULL));
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
// 创建点云数据
cloud->width = 1000;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i)
{
cloud->points[i].x = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024.0f * rand() / (RAND_MAX + 1.0f);
}
pcl::octree::OctreePointCloudSearch<pcl::PointXYZ> octree(0.1);
octree.setInputCloud(cloud);
octree.addPointsFromInputCloud();
pcl::PointXYZ searchPoint;
searchPoint.x = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.y = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.z = 1024.0f * rand() / (RAND_MAX + 1.0f);
//半径内近邻搜索
vector<int>pointIdxRadiusSearch;
vector<float>pointRadiusSquaredDistance;
float radius = 256.0f * rand() / (RAND_MAX + 1.0f);
cout << "Neighbors within radius search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with radius=" << radius << endl;
if (octree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
{
for (size_t i = 0; i < pointIdxRadiusSearch.size(); ++i)
cout << " " << cloud->points[pointIdxRadiusSearch[i]].x
<< " " << cloud->points[pointIdxRadiusSearch[i]].y
<< " " << cloud->points[pointIdxRadiusSearch[i]].z
<< " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << endl;
}
// 初始化点云可视化对象
boost::shared_ptr<pcl::visualization::PCLVisualizer>viewer(new pcl::visualization::PCLVisualizer("显示点云"));
viewer->setBackgroundColor(0, 0, 0); //设置背景颜色为黑色
// 对点云着色可视化 (red).
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>target_color(cloud, 255, 0, 0);
viewer->addPointCloud<pcl::PointXYZ>(cloud, target_color, "target cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "target cloud");
// 等待直到可视化窗口关闭
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(1000));
}
return (0);
}
如图即成功


瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐

 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)