
基于PSIM的BUCK闭环电路设计
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档文章目录前言一、设计指标及要求二、主回路电容电感值三、开关器件选取三、控制器结构和参数总结前言本文章是电力电子技术中DCDC变化器中的BUCK,主要采用PSIM仿真,适用于需要设计此变换器的课设同学。一、设计指标及要求BUCK变换器有关指标为: 输入电压:标称直流48V,范围: 43V~53V 输出电压:直流25V, 4A 输出
文章目录
前言
本文章是电力电子技术中DCDC变化器中的BUCK,主要采用PSIM仿真,适用于需要设计此变换器的课设同学。
一、设计指标及要求
BUCK变换器有关指标为:
输入电压:标称直流48V,范围: 43V~53V
输出电压:直流25V, 4A
输出电压纹波: 100mV
电流纹波: 0.25A
开关频率: 250kHz
相位裕量: 60°
幅值裕量: 10dB
设计要求:
1)计算主回路的电感和电容值
2)开关器件选用MOSFET,计算其电压和电流定额
3)设计控制器结构和参数
4)画出整个电路,给出仿真结果、分析和结论
二、主回路电容电感值
电感值计算:

电容值计算:
实际中,考虑到能量存贮以及输入和负载变化的影响,C的取值一般要大于该计算值。故取120uF,此外Resr=50毫欧.
三、开关器件选取
额定电压:直流电源的输入电压为43-53V,故其漏源最大电压,在选取20%-30%裕量,这里取20%裕量,故其Un=63.6
额定电流:其尖峰电流Imax=4.25A,选取20%裕量,In=5.1A
四、控制器结构和参数
1、主电路的开环传递函数:

将 代入得到:
代入得到:
用PSIM仿真得到波特图
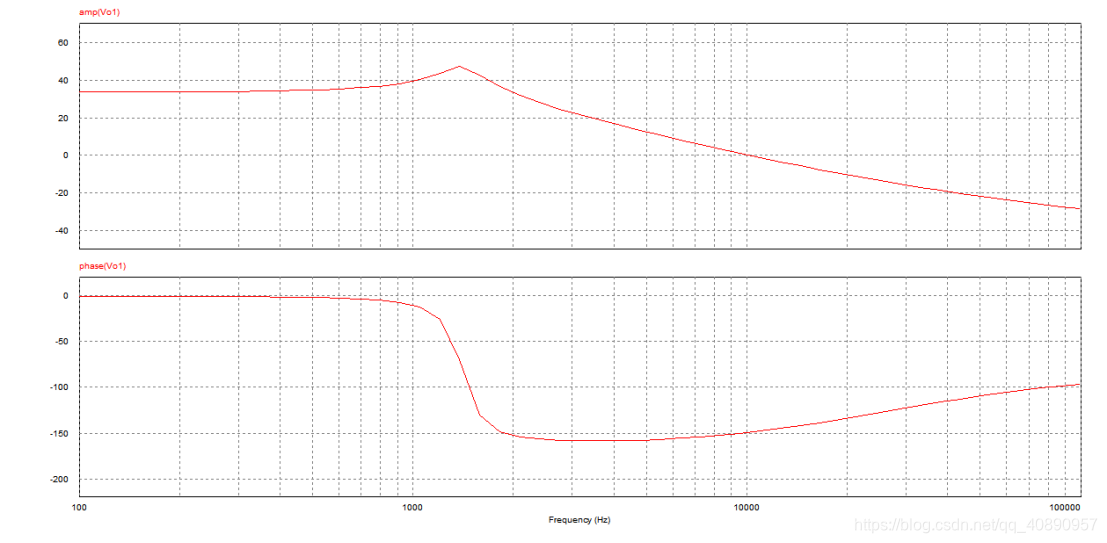
可根据三频段法可知在低、中、高频段都不满足我们要求。
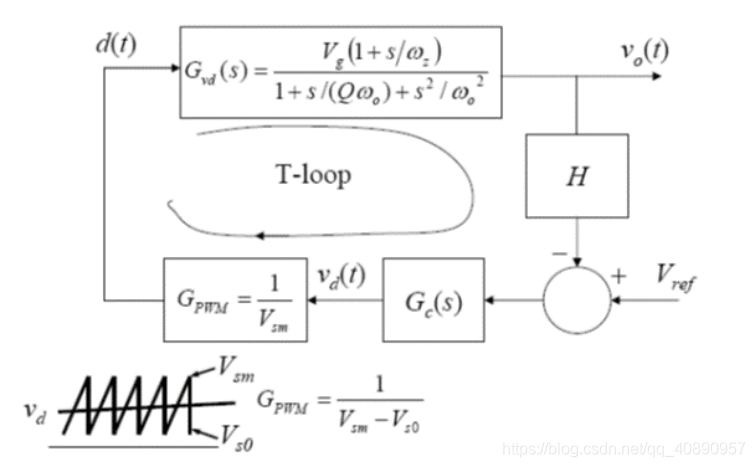

若锯齿波的幅值取1V,,则得R1=4000欧,Rbias=1000欧,故Gpwm=1,H(s)=1/5,在不考虑调节器的情况下,原始得回路增益T0=Gvd(s)GpwmH(s),波特图与Gvd得波特图类似,其幅频特性曲线向下平移,分析类似,依旧不满足要求,故引入调节器。
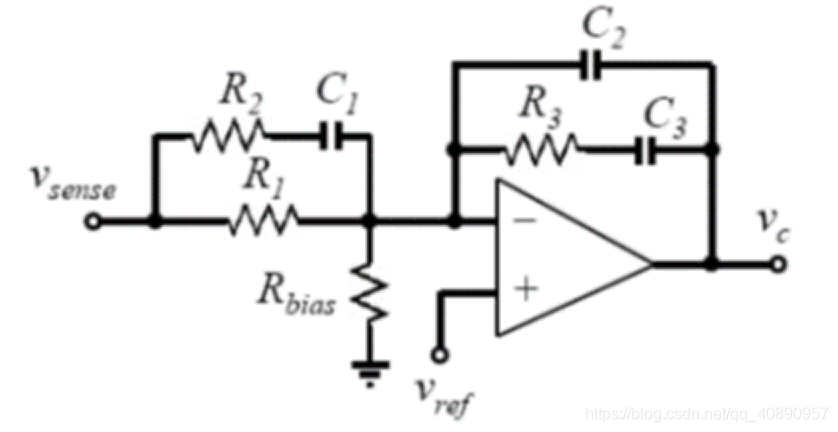
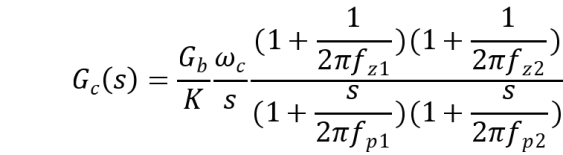
2、补偿环节Gc(s)采用类型3——PID调节器
(1)确定相位裕量:取60°
(2)确定剪切频率fc:PID最大增益为180°,故总有90°的相位裕量。故无论fc取多少,其相位裕量总大于60°,fc越大,其系统响应速度越快,但fc太大,其开关频率过高,产生开关损耗大等缺点。故需要折中考虑。这里取fc=10KHZ.
(3)确定Gb:开环函数在fc处的增益为13.5892db=4.78064.
(4)计算K: 根据此表达式利用matlab即可计算出K=13.557.
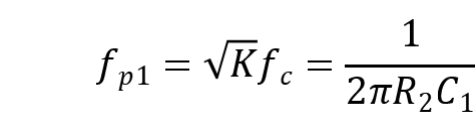
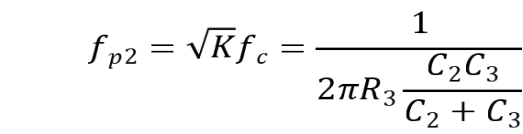
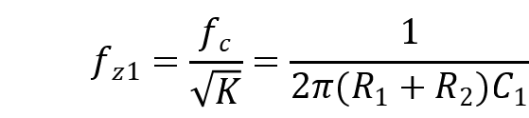
(5)确定零极点:
(6)确定参数:
采用matlab解方程即可得到五个参数

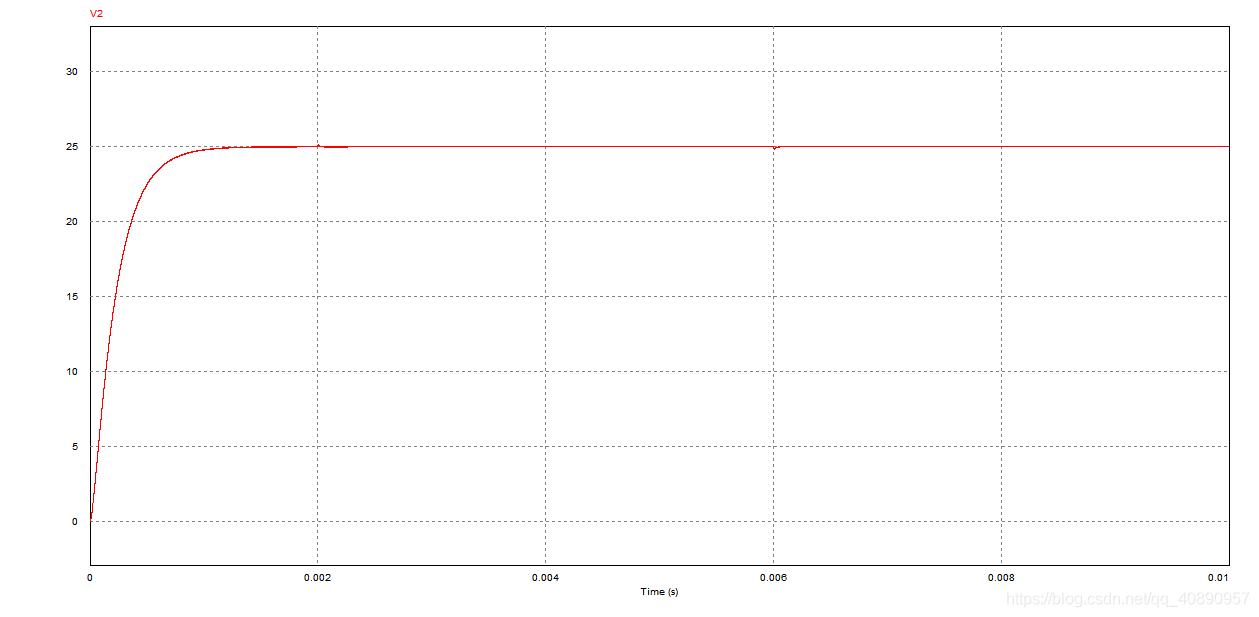
3、PSIM仿真
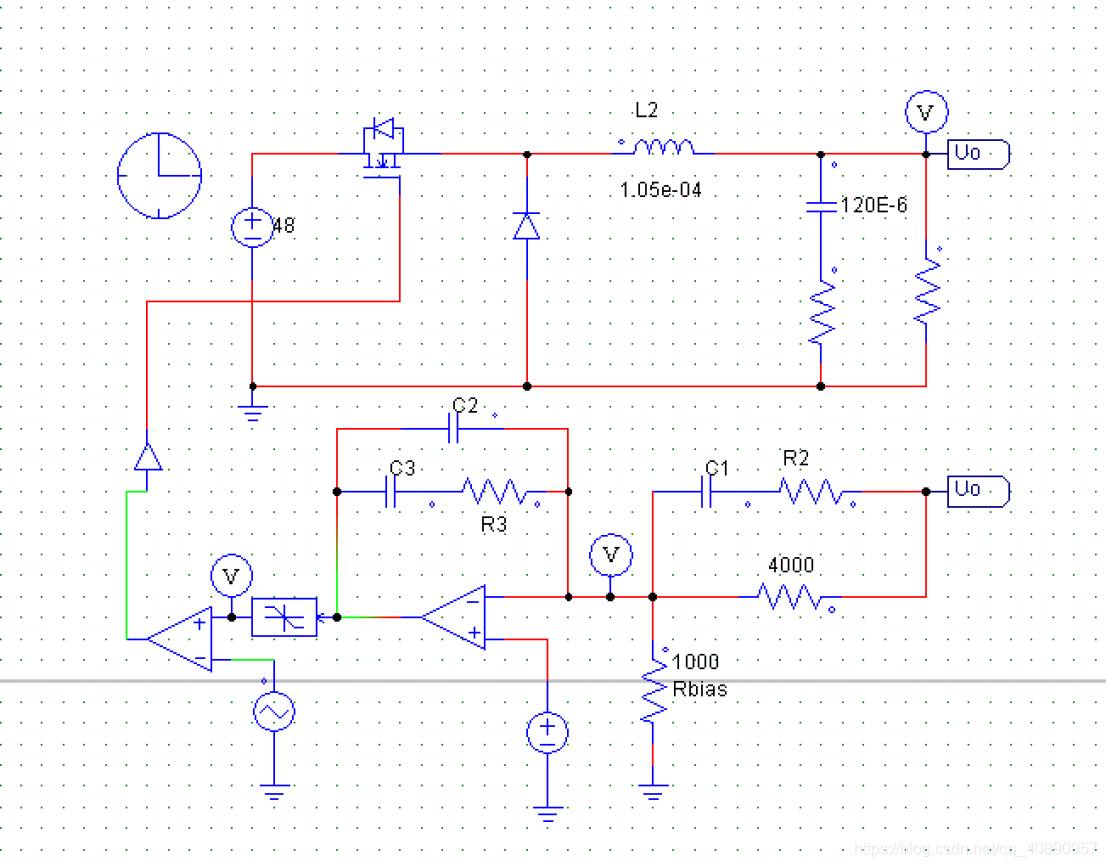
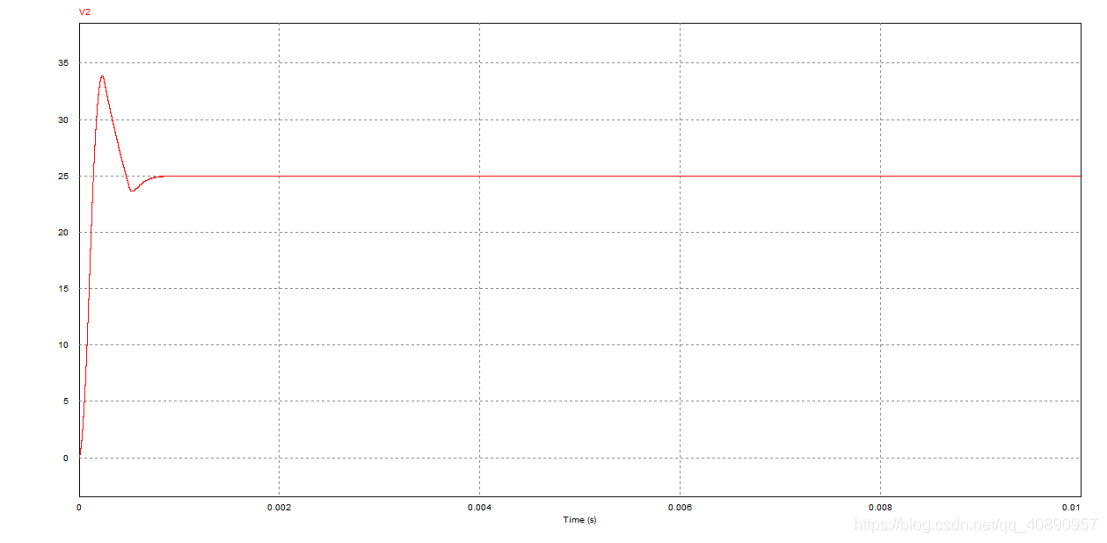
电压稳定的时间大约在1ms,其电压值稳定在25V,峰值电压为33.86V,
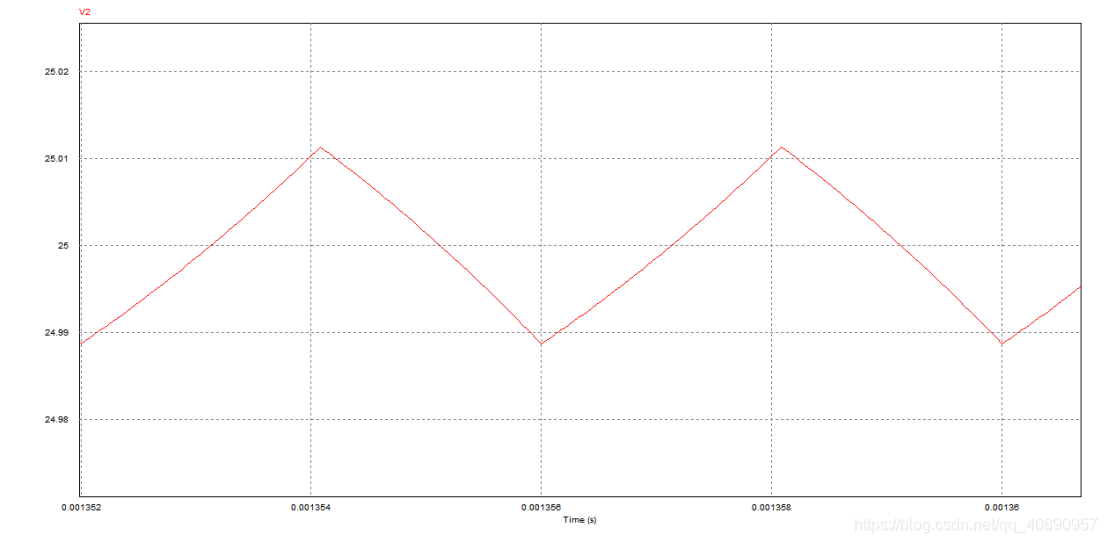
稳定后的电压纹波1.1262mV。

稳定后电流纹波1.8082mA。
4、阶跃实验结果
从满载——半载——满载

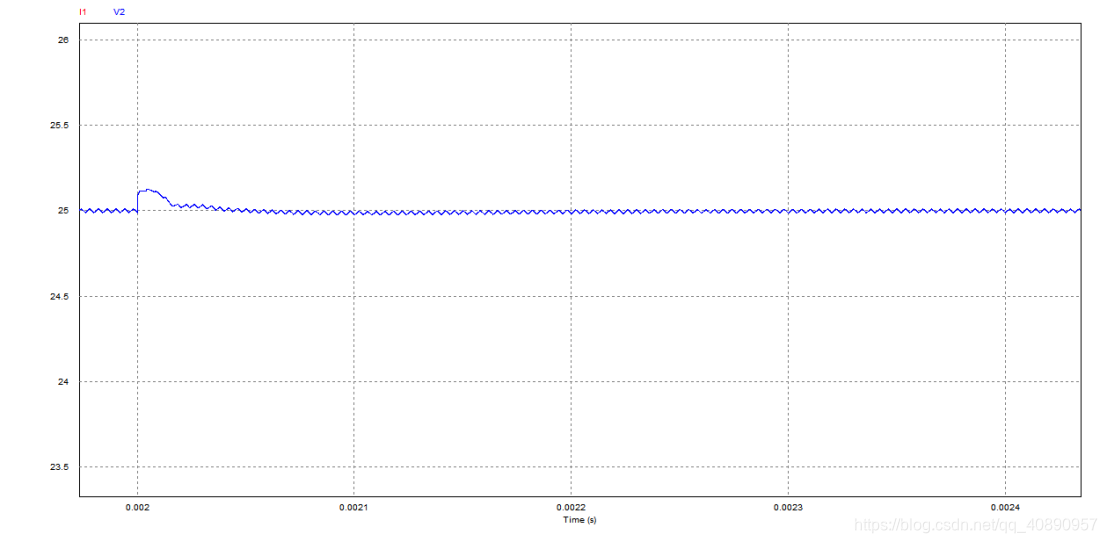
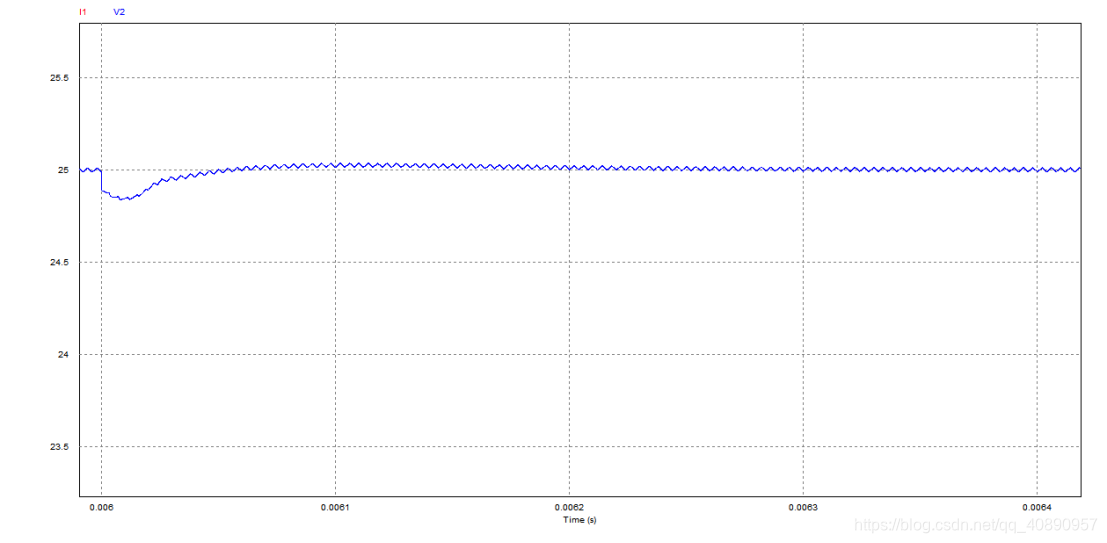
从满载到半载,电压略微变大,稳定时间大约在0.4ms
从半载到满载,电压略微变小,稳定时间大约在0.4ms
五、电路改进
由前文可知,其超调为35.44%,在实际中的器件一般无法承受,故不实用,这里采用软起动方法,其原理是让参考电压从零开始缓慢增加。
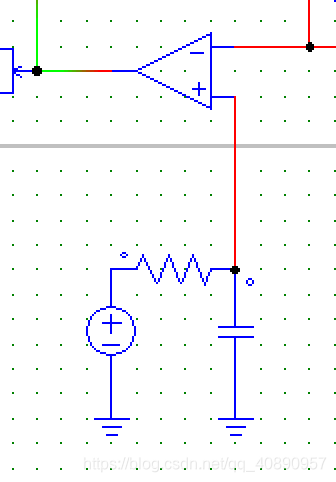
其超调几乎没有。
总结
总的来说,设计BUCK闭环调节器,用到的技能还是非常多的,如果能够自己做一遍,收获还是蛮大的,当然博主的能力有限,如果有错误请大家在评论区指出,欢迎大家积极讨论!
如果有需要,可以下载PSIM的仿真电路。https://download.csdn.net/download/qq_40890957/13194096

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 25
25 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)