机器人学之运动学笔记【7】—— 机械手臂轨迹规划实例
机器人学之运动学笔记【7】—— 机械手臂轨迹规划实例1.任务描述2. 参数设定3. 方法一:以linear function with parabolic blends 在 Cartesian space 下规划轨迹3.1 步骤一3.2 步骤二3.3 步骤三3.4 步骤四3.5 步骤五4. 方法二:以linear function with parabolic blends 在 Joint spa
机器人学之运动学笔记【7】—— 机械手臂轨迹规划实例
用一个例题把整门课程的重点知识做一个汇整应用
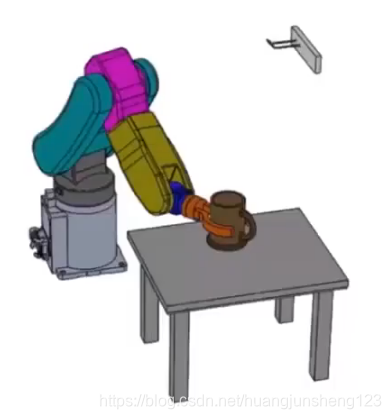
1.任务描述
机械手臂夹住放在桌子上的杯子,移动手臂将杯子挂到墙上的杯架,规划手臂【将杯子从桌面拿起放上杯架】间的整段轨迹
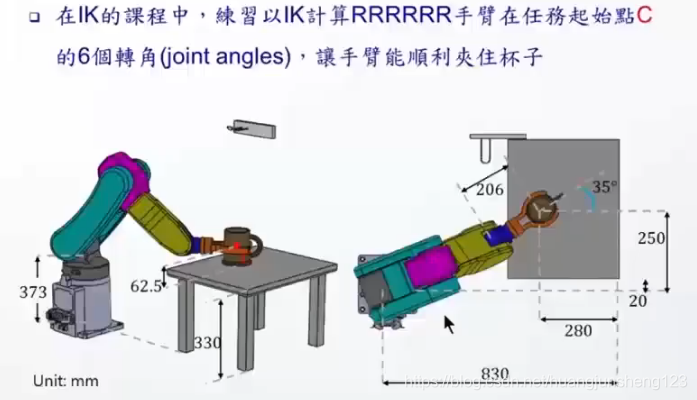
initial point 对应 fc0;final point 对应 fcf;
如果直接以起点和终点做轨迹规划的话,可能会发生一些现问题:我们无法确保在开始时,杯子不会受到向下的挤压。所以增设两个via point ,一个 fc1 设置在杯子重心上方,确保轨迹路径是向上的;一个 fc2 设置在杯架前方,确保杯子是先移动到杯架前方然后再水平移动到杯架上面。

2. 参数设定
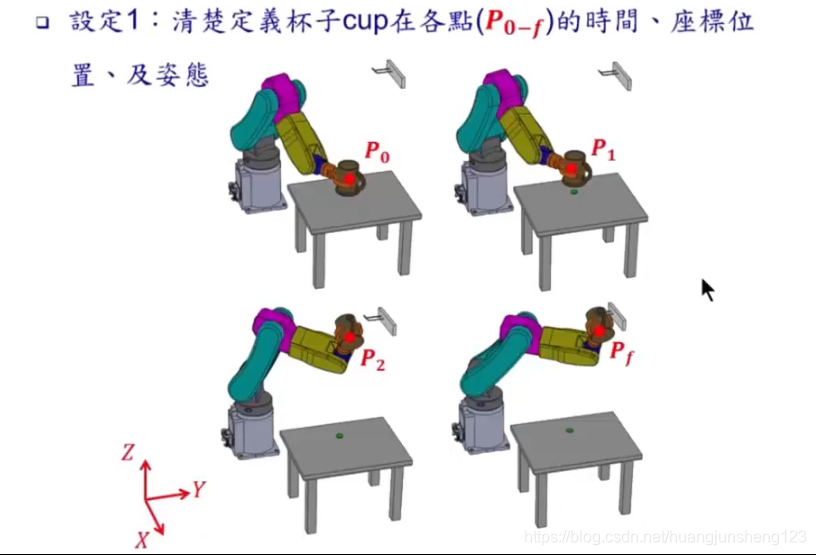
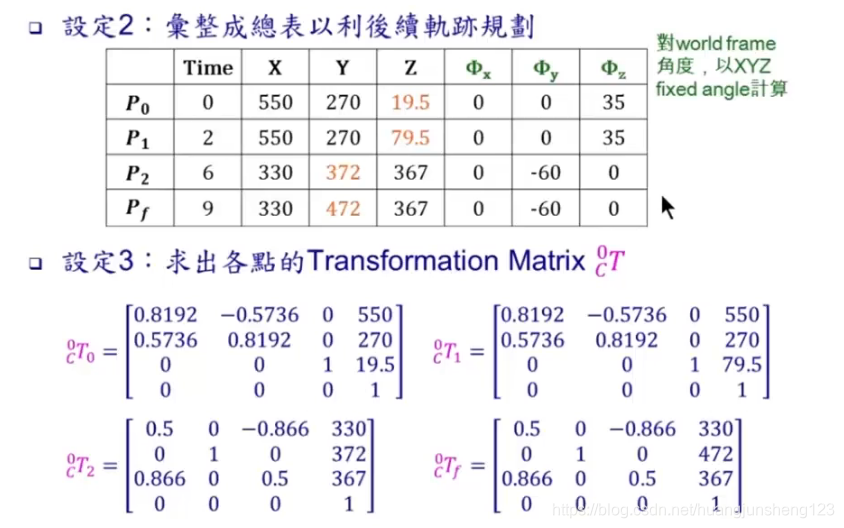
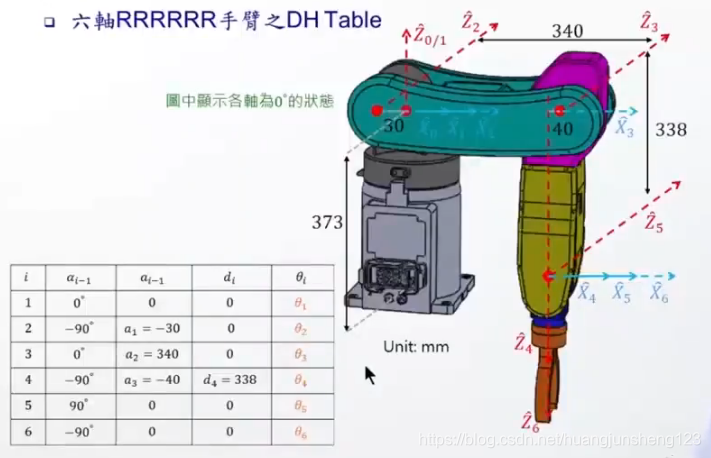
注意:这里 PPT所示有误,不是以 world frame 角度,是以关节0角度计算。找出杯子在各个轨迹点时相对于{0}的 Transformation Matrix 。
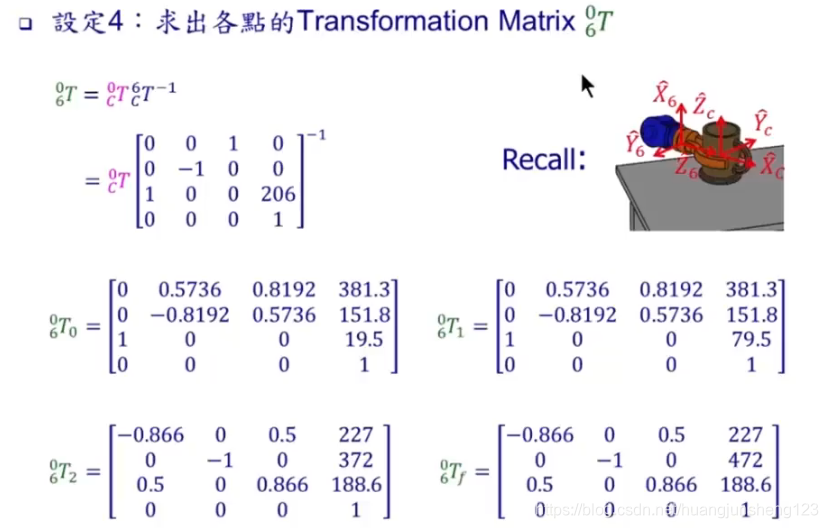
我们关心的是{6}对{0}的 Transformation Matrix,所以还需要进一步找到C对{6}的Transformation Matrix,从而求解出{6}对{0}的 Transformation Matrix。
3. 方法一:以linear function with parabolic blends 在 Cartesian space 下规划轨迹
3.1 步骤一
3.2 步骤二
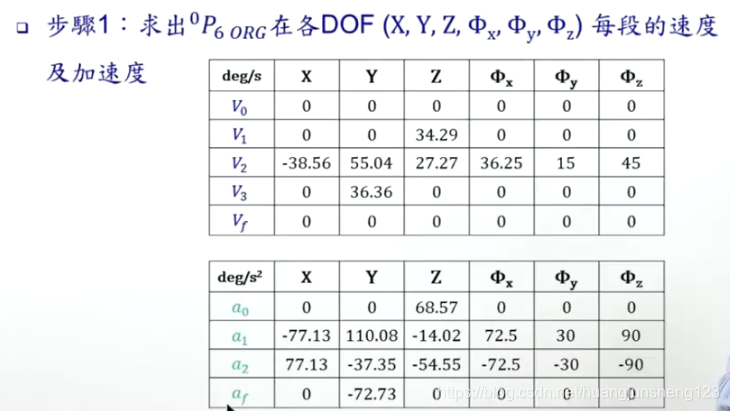
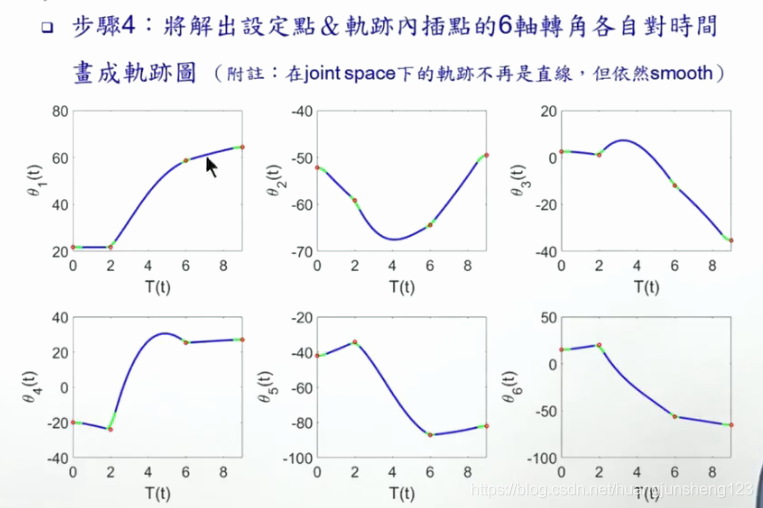
在 cartesian space 下将6个自由度规划出来就是长这个样。
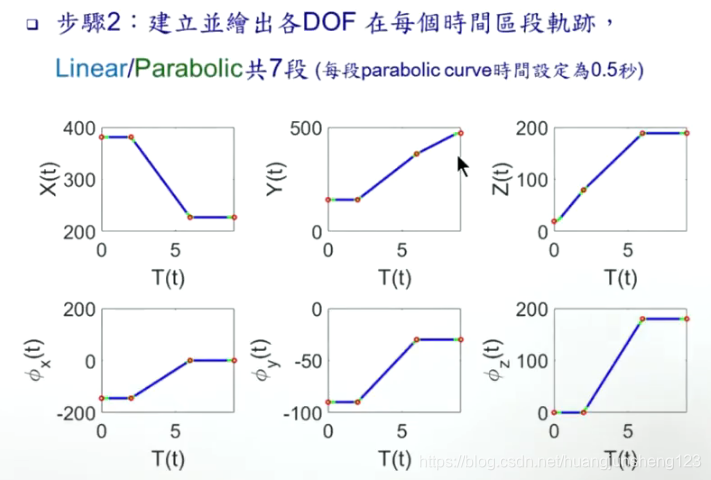
到目前为止,我们只是了解了所要规划的轨迹是怎样的,还没有涉及到机械臂相关的部分,所以下一步就需要逆运动学解算。
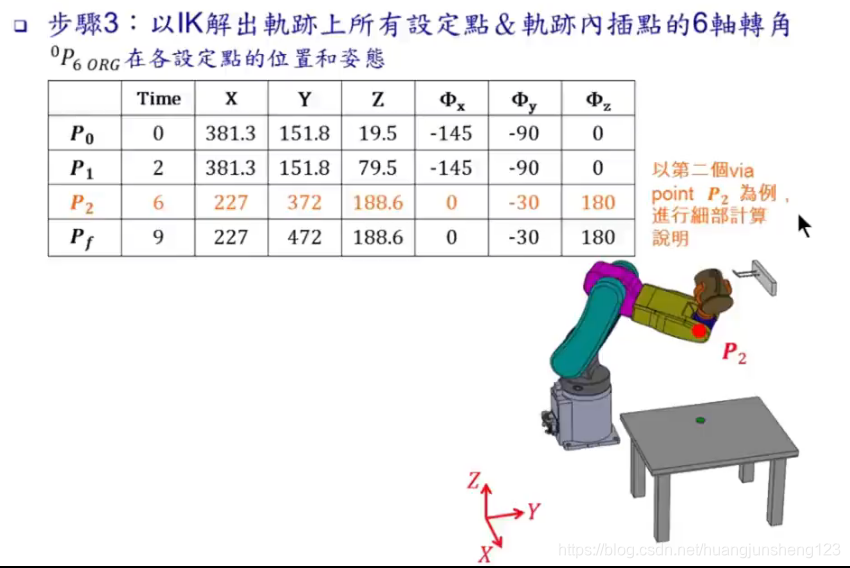
3.3 步骤三
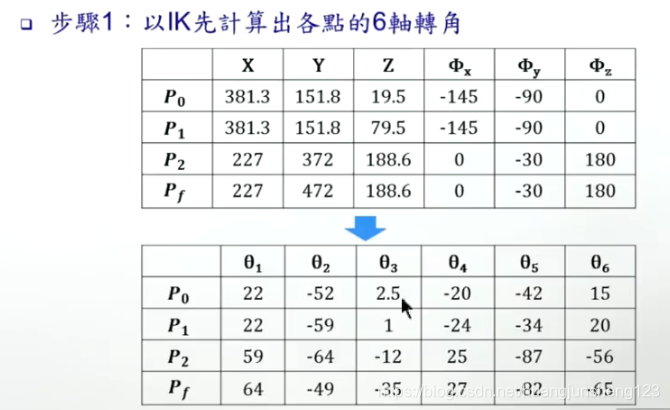
这里需要以IK解算出轨迹上所有设定点以及内插点的六轴转角,计算量非常大
这里以第二个via point P2为例进行详细逆运动学计算
先把123轴的角度解出来,然后456轴的角度再以 Euler angle 的方式去解

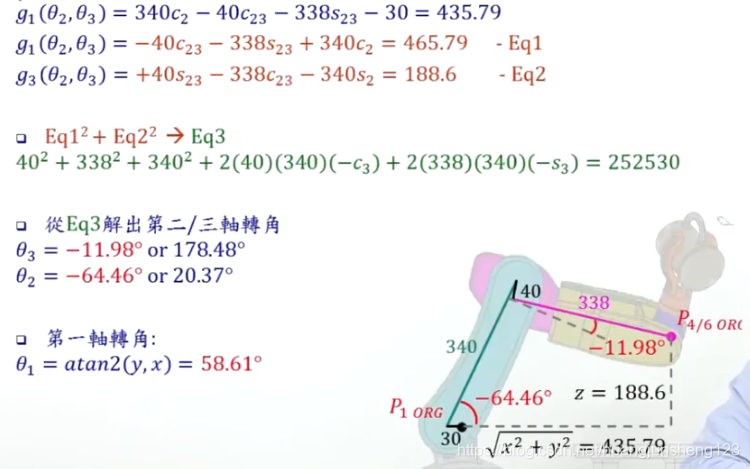
到这里就将 P2 时刻的前三轴的角度计算完了
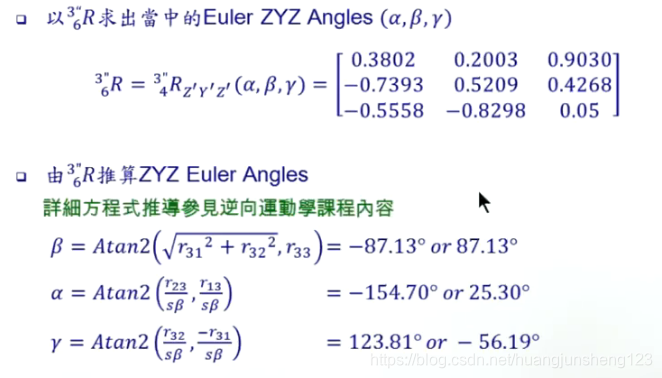
 ZYZ的方式就是以Z4的轴向做后续的转动,但是现在Z3和Z4方向如图所示,如果从3对0做ZYZ的话差了一个角度,必须把3对0转到456这边与ZYZ做对应。
ZYZ的方式就是以Z4的轴向做后续的转动,但是现在Z3和Z4方向如图所示,如果从3对0做ZYZ的话差了一个角度,必须把3对0转到456这边与ZYZ做对应。
 DH上面定义的 θ4、θ5、θ6是针对{4}{5}{6}的Z轴旋转的,而ZYZ的 euler angle 是针对同一个frame上面的Z轴、Y轴、Z轴去转的
DH上面定义的 θ4、θ5、θ6是针对{4}{5}{6}的Z轴旋转的,而ZYZ的 euler angle 是针对同一个frame上面的Z轴、Y轴、Z轴去转的

3.4 步骤四
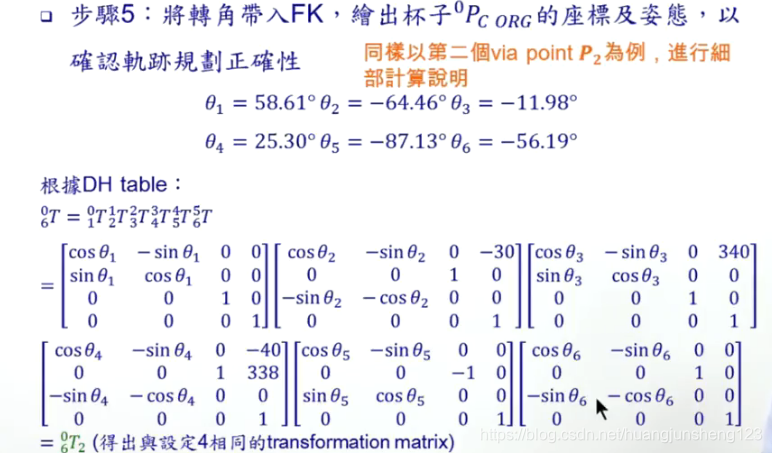
3.5 步骤五
4. 方法二:以linear function with parabolic blends 在 Joint space 下规划轨迹
4.1 步骤一
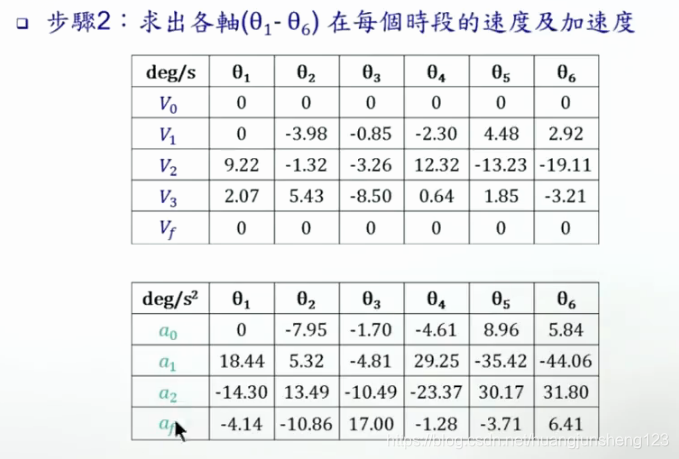
4.2 步骤二
4.3 步骤三
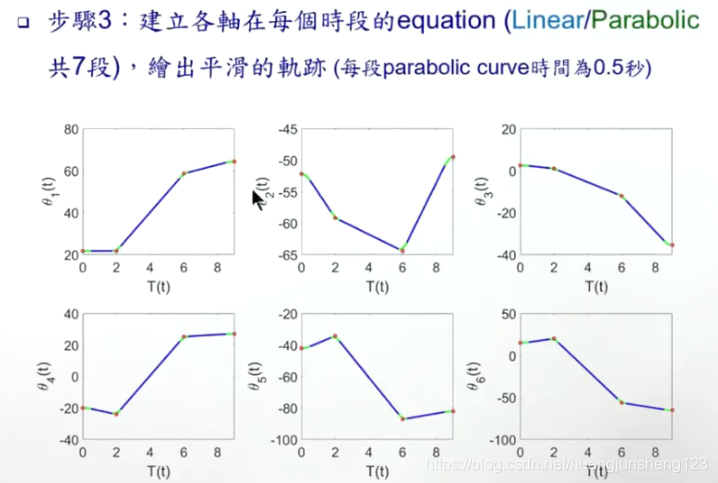
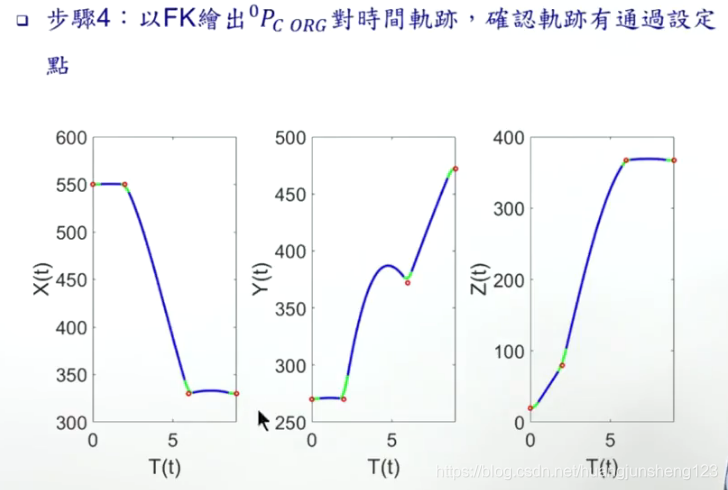
4.4 步骤四

5. 小结
通过机器人学一的学习,主要涵盖了以下知识点
- 刚体运动状态的描述
- 顺向运动学
- 逆向运动学
- 轨迹规划

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 10
10 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)