- @huangjunsheng123
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
7_Trapezoidal Decomposition_宾夕法尼亚大学机器人运动规划专项课程【学习笔记】路径规划的另一个思路被称为“单元分解法”【Cell Decomposition】,其应用在位形空间中障碍是多边形的情况下尤为高效。目标是将机器人的自由空间划分为一系列更简单的区域,然后将整体空间变成一张辅助图,其中利用各区的点和边来代表彼此相邻的区域。这个图展示了单元分解法在二维空间中的一种常见
4_Configuration Space_宾夕法尼亚大学机器人运动规划专项课程对于目前已经接触的运动规划,是已经简化在图表上进行规划的,机器人本身可以看作是简单的离散的点。然而再现实世界中,大多数的机器人可以在连续空间内运动,这里就引入了“位形空间”(Configuration space)的概念,它帮助我们在统一的框架内思考问题。简单来说,机器人的位形空间是指所有机器人能够达到的位置所组成的空
Gazebo plugins in ROS1. 要了解2. 插件类型3. 添加一个ModelPlugin4. 添加一个SensorPlugin5. gazebo_plugins中的所有可用插件5.1 Camera5.2 GPU Laser(激光测距传感器)1. 要了解Gazebo插件为URDF模型提供了更大的功能,并且可以将ROS消息和服务调用捆绑在一起以用于传感器输出和电动机输入。2. 插件类型
如何用Github找开源项目文章转载自:三分钟教你如何用Github找开源项目–值得一看!作者:Z小旋GitHub各位应该都很熟悉了,全球最大的开源社区,也是全球最大的同性交友网站((ง •_•)ง),但是大部分同学使用GitHub应该就是通过别人的开源链接,点进去下载对应的项目,而真正使用Github来查找开源项目的还是少数,面试总得有几个和所求岗位相关的项目,如果应届生、转行的童鞋没有项目,就
1. 绪论系统动力学的作用:当系统与外界环境有交互的时候,外界环境对它有影响,它自身会有什么样的输出,这是系统动力学最基本的一个意义。动力学方程:描述系统与环境的交互的演变规律。2. 动力学建模2.1 关节动力学在考虑柔性关节的时候会将系统分为两部分考虑:一部分从电机→减速器→弹簧一部分弹簧→连杆由于过程中需要测得两个角度并且由于弹簧的存在引入了形变量,需要安装两个编码器来测量角度2.2 连杆动力
Husky仿真环境搭建&使用1. 下载安装1. 下载安装ROS官方:Robots/Husky - ROS WikiGithub官方:Husky/Husky我的ROS是kinetic,所以在branch中选择Kinetic - devel分支代码:
1.Kinova_ROS软件包官网镇楼:https://github.com/Kinovarobotics/kinova-ros#moveit.2.Gazebo for Kinova robots官网:https://github.com/Kinovarobotics/kinova-ros/wiki/Gazebo.下载kinova-ros软件包:git clone https://github.c
Using a URDF in Gazebo1.要明确的问题:2.下面以最简单的两关节机械臂RRBot开启我的学习之旅:3.代码是如何实现的:3.1 Link3.1.1 < collision >和< visual >elememt:3.1.2 < interial >element3.2 Joints1.要明确的问题:URDF是什么?统一机器人描述格式(URD
1.Kinova_ROS软件包官网镇楼:https://github.com/Kinovarobotics/kinova-ros#moveit.2.Gazebo for Kinova robots官网:https://github.com/Kinovarobotics/kinova-ros/wiki/Gazebo.下载kinova-ros软件包:git clone https://github.c
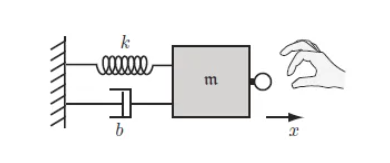
下面还是以一个与环境交互的单自由度质量块系统为例,阐述阻抗控制和导纳控制。假设质量块的质量为mmmxxx是质量块的位移,FFF是控制力,FextF_{ext}Fextmx¨FFext(1)mx¨FFext1导纳和阻抗控制的控制目标都是设计控制力FFF使外部力FextF_{ext}Fext和ex−x0ex−x0Mde¨Dde˙KdeFext(2)M。