机器人学之运动学笔记【5】—— 用三次多项式的轨迹规划方法
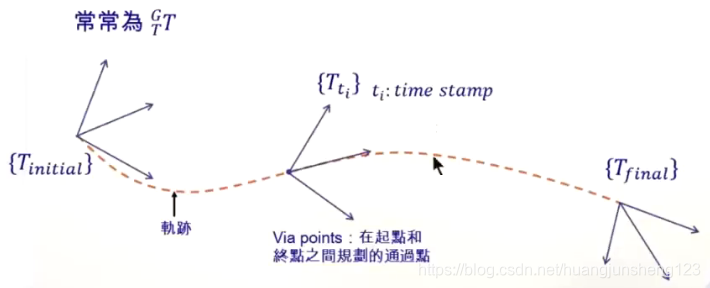
机器人学之运动学笔记【5】—— 机械臂轨迹规划【1】轨迹:机械臂的末端点或操作点的位置、速度、加速度对时间的历程
机器人学之运动学笔记【5】—— 用三次多项式的轨迹规划方法
轨迹:机械臂的末端点或操作点的位置、速度、加速度对时间的历程
理想轨迹:smooth path,位置以及速度甚至加速度都连续的轨迹
1. Joint-space 下的轨迹规划

用图形描述上述过程:
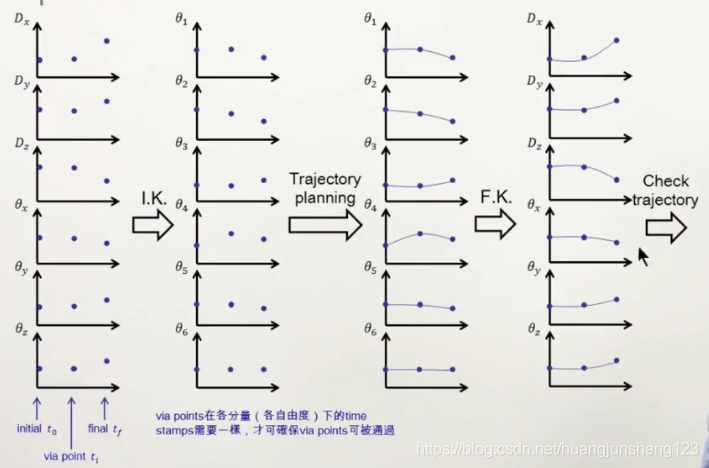
总结起来就是:
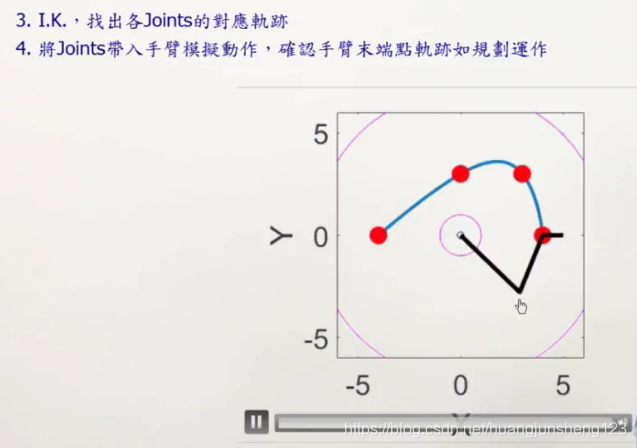
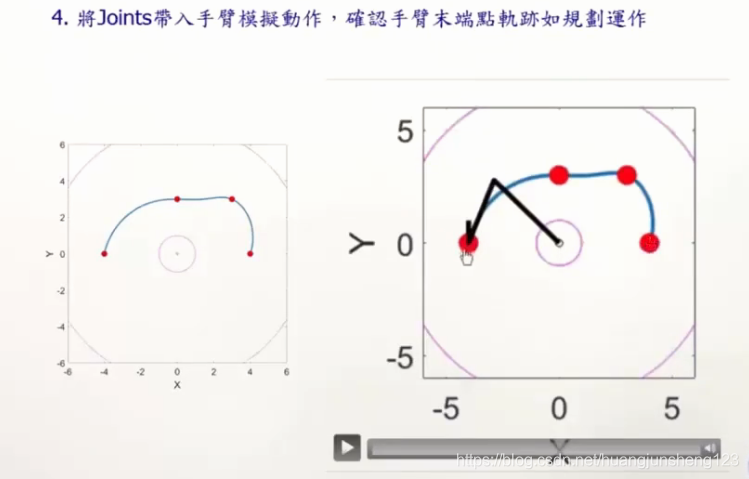
由笛卡尔空间变换到关节空间,中间需要逆运动学求解,找出目标姿态对应的各个关节角度,然后轨迹规划,描绘出各个关节角度随时间的变动情况,最后用正向运动学求解一下,看看所求轨迹是否和理论轨迹相符,再检验一下轨迹的可行性。
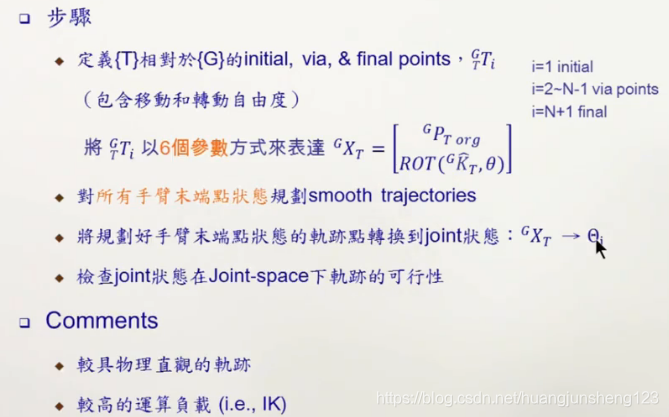
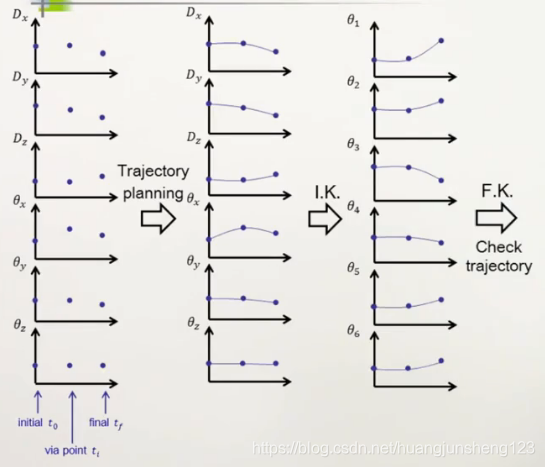
2. Cartesian-space下的轨迹规划
第一步和 Joint space 时一样,因为第一步其实是和轨迹规划的部分是独立的,是对需求的描述。
3. 轨迹规划方法一:Cubic Polynomials(三次多项式)
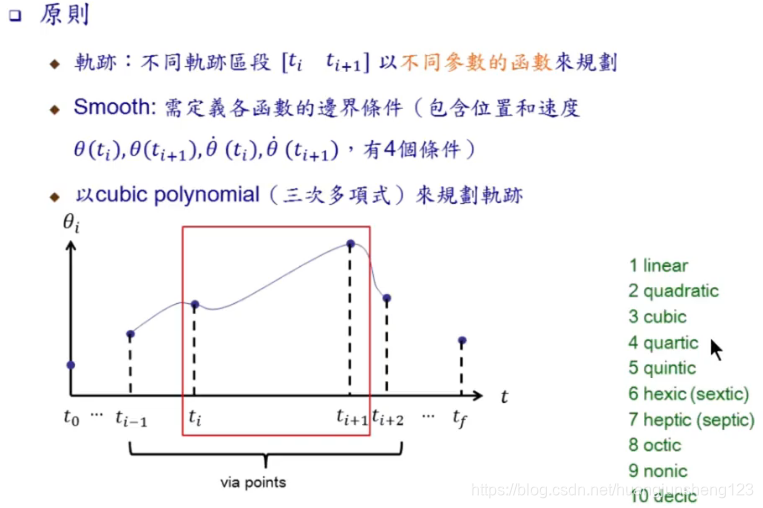
- 每两个点之间用不同参数的函数来规划,找到函数把两个点串起来
- 任何两端相接的轨迹都要满足 smooth 的条件,也就是说每段函数头尾处的条件要定义清楚,所以一段函数、两个边界、四个条件。因此需要三次多项式来规划轨迹(因为三次多项式有4个参数可供我们选择)
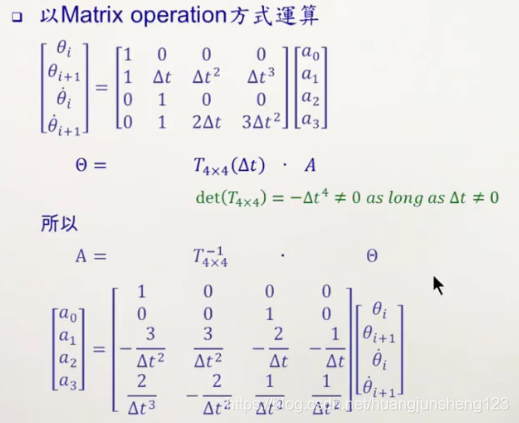
3.1 解单段 Cubic polynomial

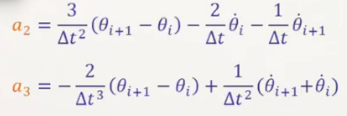
对于一条三次多项式曲线,包含a0、a1、a2、a3四个未知参数,使用 t‘ = t - t(i) 处理方法可以简约计算,结合四个边界条件,可以很快求得四个未知参数的值。
3.2 解多段 Cubic Polynomials
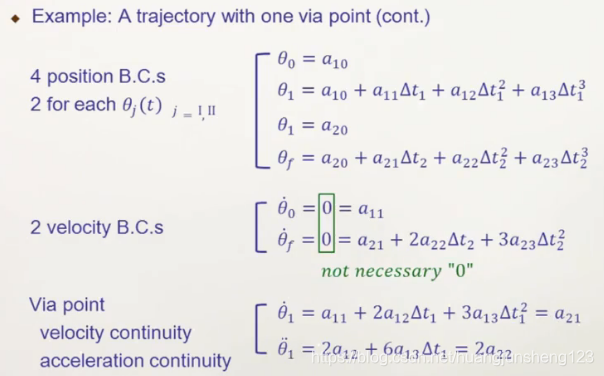
如果对于中间的一个 via point ,位置我们可能会已知,那么速度边界条件该如何定义呢?或者说如何选择速度条件呢?
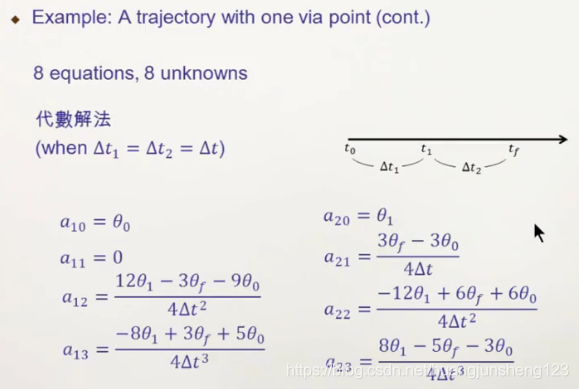
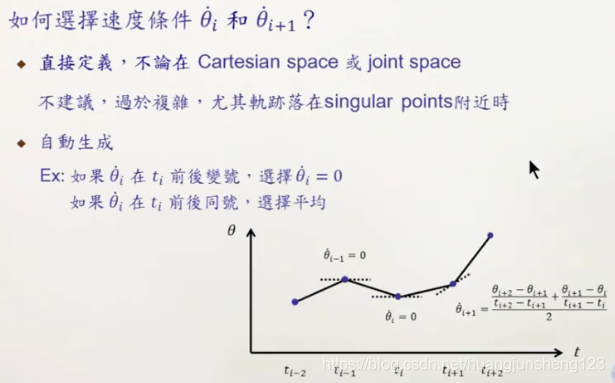 以这两个方式,不同区段的 Cubic polynomials 可以分开求解。
以这两个方式,不同区段的 Cubic polynomials 可以分开求解。

求得两条三次多项式曲线,包含8个未知数,通过下图所示:四个位置边界条件、两个速度边界条件、一个速度连续条件、一个加速度连续条件总共8个条件,就可以求得这8个未知参数,从而确定两条三次多项式曲线。
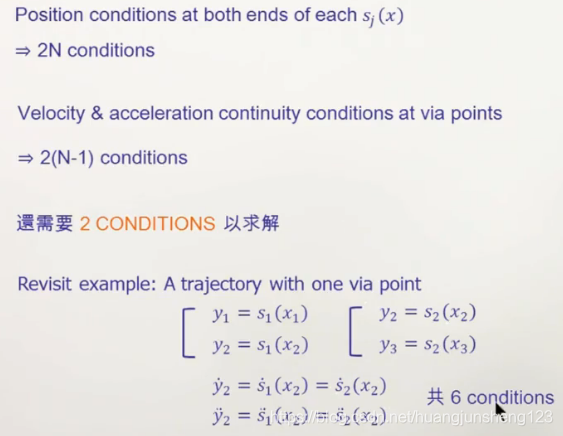
3.3 推广到一般情况 General cubic spline function

这里设置成N+1是为了造成N条线段,每条线段有四个未知参数,所以总共有4N个参数需要求解,为此还需要找到4N个方程联立求解。

3.4 练习
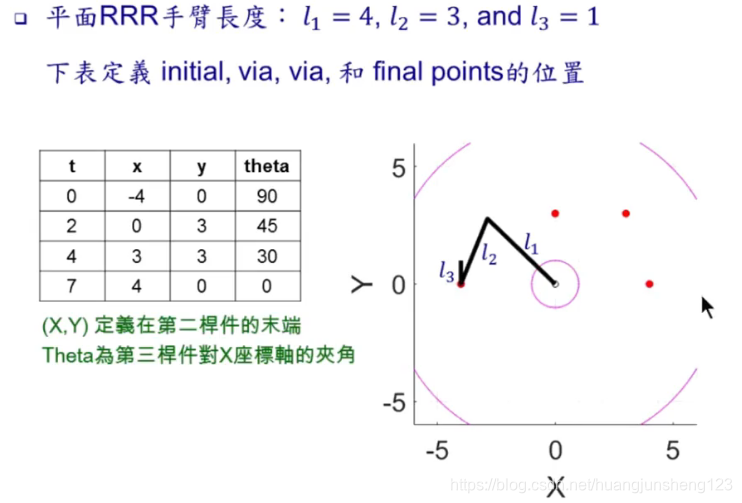
3.4.1 以cubic polynomials 在 Cartesian-space 下规划轨迹
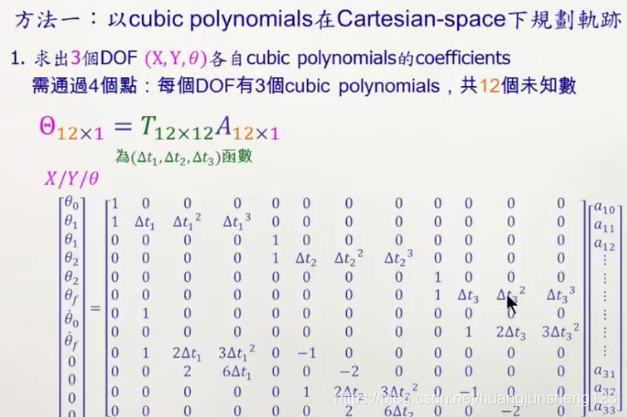
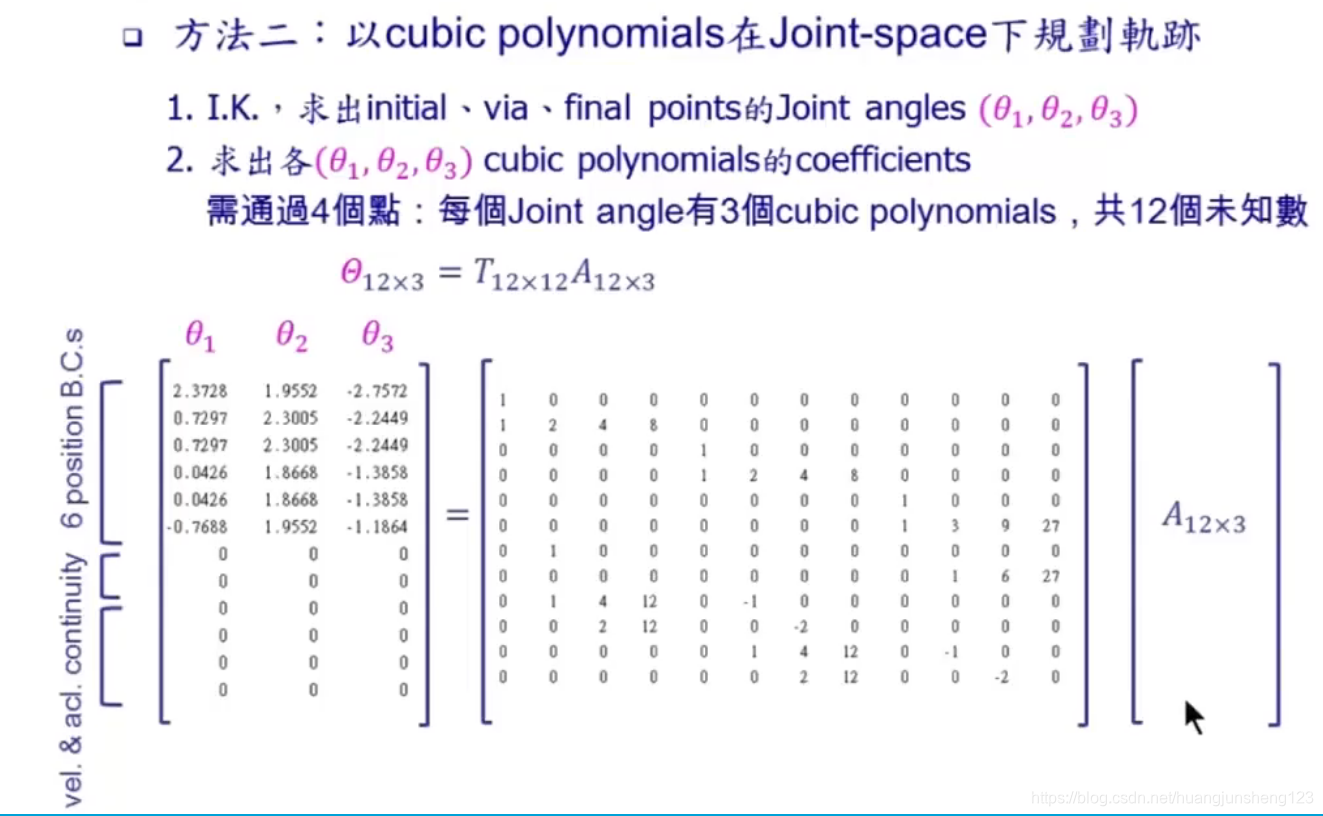
每个自由度包含三条三次多项式曲线,而每条曲线对应4个未知数,所以一个自由度要确定12个未知参数。
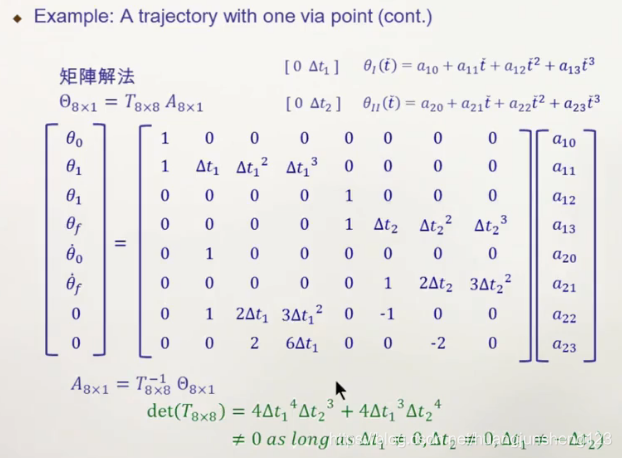
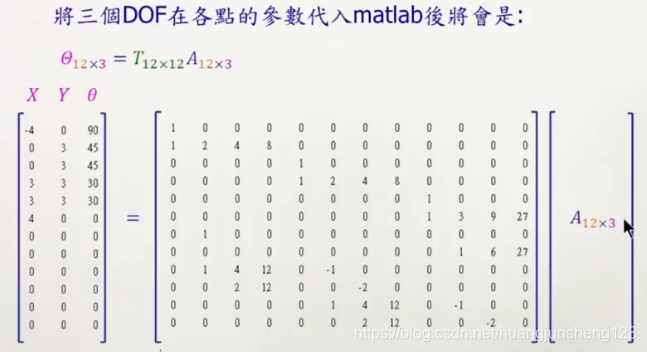
用矩阵解法,前六个是位置条件,第七第八个条件是一开始的速度和最后的速度,第九第十个条件是第一个 via point 的速度和加速度条件,倒数后两个是第二个 via point 的速度加速度条件。

3.4.2 以cubic polynomials 在 Joint-space 下规划轨迹
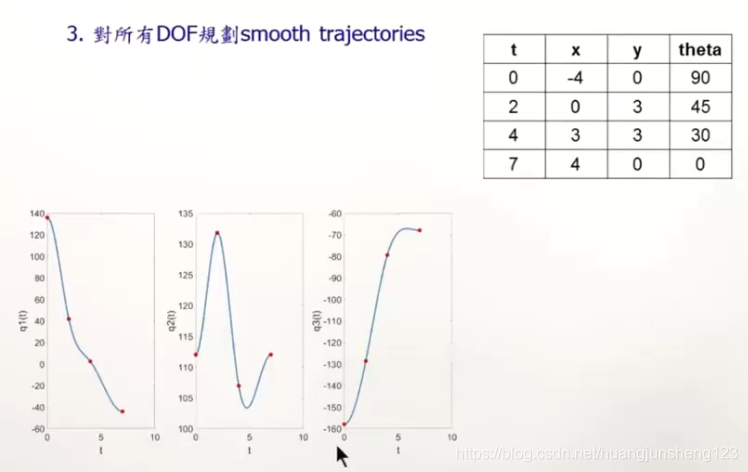
4. 位置、速度、加速度都需要规划的情况


CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 9
9 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)