
SLAM十四讲_第四讲(ch4)_Sophus的基本使用以及轨迹误差(包含代码详细注释,包含绘制估计轨迹和真实轨迹)
一、Sophus的基本使用注:在编译前,应该装好Sophus库,该库要用到一些依赖,可自行去csdn查找在github的slambook2(by_gaoxiang)上给出了相关的第三方库该程序主要包含简单的李群李代数的的定义以及转换源码如下:////该程序包含Sophus库的基本使用//包括 李群(SO3、SE3)、 李代数(so3、 se3)以及相应的转换#include<iostream
·
一、Sophus的基本使用
注:在编译前,应该装好Sophus库,该库要用到一些依赖,可自行去csdn查找
在github的slambook2(by_gaoxiang)上给出了相关的第三方库
该程序主要包含简单的李群李代数的的定义以及转换
源码如下:
//
//该程序包含Sophus库的基本使用
//包括 李群(SO3、SE3) 、 李代数(so3、 se3) 以及相应的转换
#include<iostream>
#include<cmath>
#include<Eigen/Core>
#include<Eigen/Geometry>
#include"sophus/se3.hpp"
using namespace std;
using namespace Eigen;
int main(int argc, char** argv)
{
cout<<"**********************************下面是SO3、 so3(旋转) ***********************************"<<endl;
Matrix3d R;
AngleAxisd rotation_vector(M_PI/2,Vector3d(0,0,1));//旋转向量,绕z轴旋转90°
R=rotation_vector.toRotationMatrix();//得到旋转矩阵R
cout<< "旋转矩阵 R = " <<endl<<R<<endl<<endl;
Quaterniond q(R);//得到四元数
cout<< "四元数 q = " <<endl<<q.coeffs()<<endl<<endl;
cout<<" *********************************李群*************************** "<<endl;
Sophus::SO3d SO3_R(R);//李群是矩阵
Sophus::SO3d SO3_q(q);
cout<<"SO3 from rotation matrix : \n"<< SO3_R.matrix() <<endl;
cout<<"SO3 from Quaternion : \n"<< SO3_q.matrix() <<endl;
cout<<" *********************************利用对数映射得到李代数*************************** "<<endl;
Vector3d so3=SO3_R.log();//李代数是三维向量
cout<<"so3 = "<< so3.transpose()<<endl;
cout<<" *****利用hat()函数,可以将向量变到反对称矩阵,利用vee()函数,可以将反对称矩阵变回向量****** "<<endl;
cout<<"so3 hat= \n"<< Sophus::SO3d::hat(so3)<<endl;
cout<<"so3 hat vee = "<< Sophus::SO3d::vee(Sophus::SO3d::hat(so3)).transpose()<<endl;
cout<<" *********************************增量扰动模型的更新*************************** "<<endl;
Vector3d so3_update(1e-4,0,0);//用李代数表示更新,李代数可以实现加减
Sophus::SO3d SO3_update =Sophus::SO3d::exp(so3_update)*SO3_R;//先用李代数得到更新量,再把更新量变为李群,左乘原来的李群就得到更新了
cout<<"SO3 update = \n"<< SO3_update.matrix() <<endl;
cout<<"**********************************下面是SE3、 se3(将旋转和平移放在一起,也就是整个的变换) ***********************************"<<endl;
//和上面SO3 类似
Vector3d t(1,0,0);//translation
Sophus::SE3d SE3_Rt(R,t);//李群SE3_Rt由旋转矩阵R和平移t构成
Sophus::SE3d SE3_qt(q,t);//李群SE3_Rt由四元数q和平移t构成
cout<<"SE3 from rotation matrix and t : \n"<< SE3_Rt.matrix() <<endl;
cout<<"SO3 from Quaternion and t : \n"<< SE3_qt.matrix()<<endl;
cout<<" *********************************利用对数映射得到李代数*************************** "<<endl;
//李代数se3是六维向量,前三维表示平移,后三维表示旋转
//利用typedef定义一个Vector6d
typedef Eigen::Matrix<double,6,1> Vector6d;
Vector6d se3=SE3_Rt.log();
cout<<" se3 = "<<se3.transpose()<<endl;
cout<<" *****利用hat()函数,可以将向量变到反对称矩阵,利用vee()函数,可以将反对称矩阵变回向量****** "<<endl;
cout<<"se3 hat= \n"<< Sophus::SE3d::hat(se3)<<endl;
cout<<"so3 hat vee = "<< Sophus::SE3d::vee(Sophus::SE3d::hat(se3)).transpose()<<endl;
Vector6d se3_update;
se3_update.setZero();
se3_update(0,0)=1e-4;//得到更新量(1e-4d,0,0,0,0,0)
Sophus::SE3d SE3_update= Sophus::SE3d::exp(se3_update)*SE3_Rt;//先将更新量变为李群,再右乘原来的SE3,得到更新量
cout<<"SE3 update = \n"<< SE3_update.matrix() <<endl;//得到更新后的SE3
return 0;
}
运行结果:
**********************************下面是SO3、 so3(旋转) ***********************************
旋转矩阵 R =
6.12323e-17 -1 0
1 6.12323e-17 0
0 0 1
四元数 q =
0
0
0.707107
0.707107
*********************************李群***************************
SO3 from rotation matrix :
2.22045e-16 -1 0
1 2.22045e-16 0
0 0 1
SO3 from Quaternion :
2.22045e-16 -1 0
1 2.22045e-16 0
0 0 1
*********************************利用对数映射得到李代数***************************
so3 = 0 0 1.5708
*****利用hat()函数,可以将向量变到反对称矩阵,利用vee()函数,可以将反对称矩阵变回向量******
so3 hat=
0 -1.5708 0
1.5708 0 -0
-0 0 0
so3 hat vee = 0 0 1.5708
*********************************增量扰动模型的更新***************************
SO3 update =
0 -1 0
1 0 -0.0001
0.0001 2.03288e-20 1
**********************************下面是SE3、 se3(将旋转和平移放在一起,也就是整个的变换) ***********************************
SE3 from rotation matrix and t :
2.22045e-16 -1 0 1
1 2.22045e-16 0 0
0 0 1 0
0 0 0 1
SO3 from Quaternion and t :
2.22045e-16 -1 0 1
1 2.22045e-16 0 0
0 0 1 0
0 0 0 1
*********************************利用对数映射得到李代数***************************
se3 = 0.785398 -0.785398 0 0 0 1.5708
*****利用hat()函数,可以将向量变到反对称矩阵,利用vee()函数,可以将反对称矩阵变回向量******
se3 hat=
0 -1.5708 0 0.785398
1.5708 0 -0 -0.785398
-0 0 0 0
0 0 0 0
so3 hat vee = 0.785398 -0.785398 0 0 0 1.5708
SE3 update =
2.22045e-16 -1 0 1.0001
1 2.22045e-16 0 0
0 0 1 0
0 0 0 1
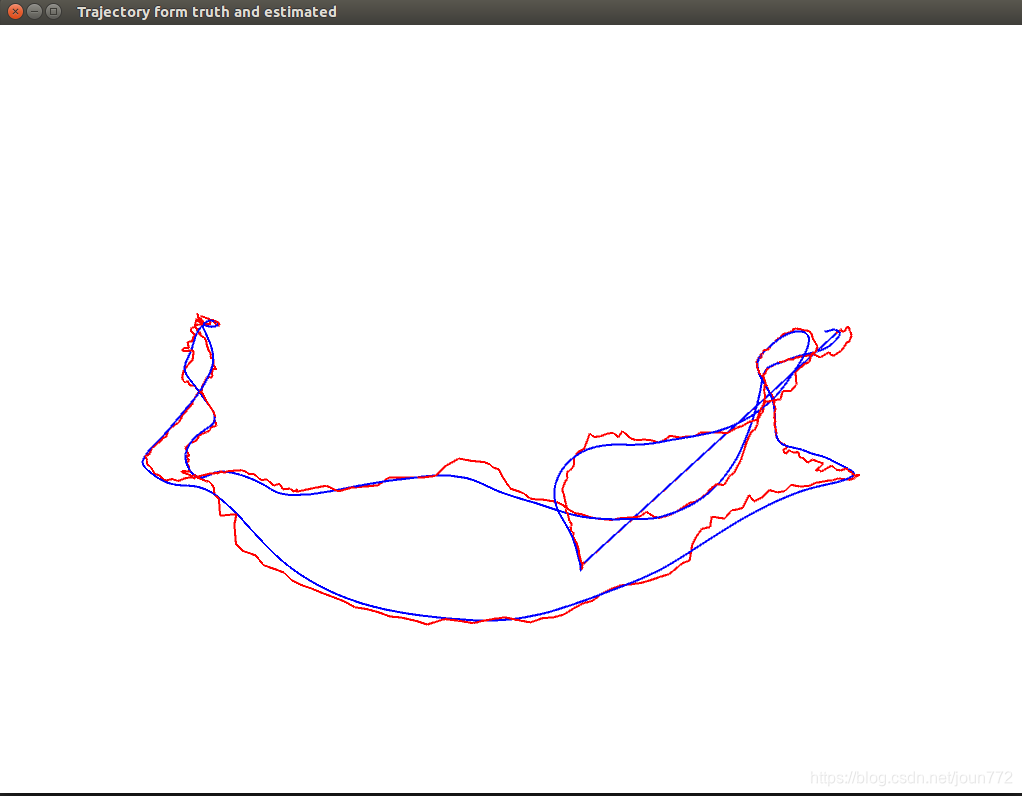
二、真实轨迹和估计轨迹的绝对误差(包含绘制估计轨迹和真实轨迹)
该程序实现的是计算真实轨迹和估计轨迹的绝对误差,同时利用pangolin/OpenGL画出真实和估计轨迹
注:要用到Eigen、pangolin、Sophus,请提前装好
源码如下:
//
//
//该程序演示了绝对轨迹误差
#include<iostream>
#include<unistd.h>
#include <fstream>
#include "pangolin/pangolin.h"
#include "sophus/se3.hpp"
using namespace Sophus;
using namespace std;
//这个地方我放的是绝对路径
string groundtruth_file="/home/nnz/data/slam_pratice/pratice_sophus/example/groundtruth.txt";//真是的位姿轨迹文件
string edtimated_file="/home/nnz/data/slam_pratice/pratice_sophus/example/estimated.txt";//估计的位姿轨迹文件
//利用typedef定义一个容器类型,里面装的是位姿(time 平移,四元数【旋转】)
typedef vector<Sophus::SE3d,Eigen::aligned_allocator<Sophus::SE3d>> TrajectoryType;
void DrawTrajectory(const TrajectoryType >,const TrajectoryType &esti);
TrajectoryType ReadTrajectory(const string &path);
int main(int argc,char **argv)
{
TrajectoryType groundtruth=ReadTrajectory(groundtruth_file);
TrajectoryType estimated=ReadTrajectory(edtimated_file);
//assert宏的原型定义在<assert.h>中,其作用是如果它的条件返回错误,则终止程序执行,原型定义:
//#include <assert.h>
//void assert( int expression );
// assert的作用是现计算表达式 expression ,如果其值为假(即为0)
// 那么它先向stderr打印一条出错信息,然后通过调用 abort 来终止程序运行
assert(!groundtruth.empty()&&!estimated.empty());
assert(groundtruth.size()==estimated.size());
//计算 绝对轨迹误差 rmse
//size_t它是一种“整型”类型,里面保存的是一个整数,就像int, long那样。
// 这种整数用来记录一个大小(size)。size_t的全称应该是size type,就是说“一种用来记录大小的数据类型”
//通常我们用sizeof(XXX)操作,这个操作所得到的结果就是size_t类型。
// 因为size_t类型的数据其实是保存了一个整数,所以它也可以做加减乘除,也可以转化为int并赋值给int类型的变量
//示例代码:
//int i; // 定义一个int类型的变量i
//size_t size = sizeof(i); // 用sizeof操作得到变量i的大小,这是一个size_t类型的值
// // 可以用来对一个size_t类型的变量做初始化
//i = (int)size; // size_t类型的值可以转化为int类型的值
double rmse=0;
for(std::size_t i=0;i<estimated.size();i++)
{
Sophus::SE3d p1=estimated[i],p2=groundtruth[i];//estimated and groundtruth : vector
double error =(p2.inverse()*p1).log().norm();//模长,见slam十四讲89页 公式4.44
rmse+=error*error;//得到模长的平方
}
rmse=rmse/double(estimated.size());
rmse=sqrt(rmse);
cout<<"绝对误差 rmse= "<< rmse<<endl;
DrawTrajectory(groundtruth,estimated);
return 0;
}
TrajectoryType ReadTrajectory(const string &path)
{
ifstream fin(path);//流入
TrajectoryType trajectory;
if(!fin)
{
cerr<<"could not find a trajectory file"<<endl;//cerr
return trajectory;
}
while(!fin.eof())//读文件
{
double time,tx,ty,tz,qx,qy,qz,qw;
fin>>time>>tx>>ty>>tz>>qx>>qy>>qz>>qw;
Sophus::SE3d p1(Eigen::Quaterniond(qx,qy,qz,qw),Eigen::Vector3d(tx,ty,tz));//得到位姿
trajectory.push_back(p1);
}
return trajectory;
}
void DrawTrajectory(const TrajectoryType >,const TrajectoryType &esti)
{
// 创建 pangolin 窗口,画轨迹
//creat and set titles 、 width 、height of windows
pangolin::CreateWindowAndBind(" Trajectory form truth and estimated ", 1024, 768);
//glEnable(GL_DEPTH_TEST)启用了之后,OpenGL在绘制的时候就会检查,当前像素前面是否有别的像素,如果别的像素挡道了它,那它就不会绘制,也就是说,OpenGL就只绘制最前面的一层。
//当我们需要绘制透明图片时,就需要关闭它glDisable(GL_DEPTH_TEST);
//并且打开混合 glEnable(GL_BLEND);
glEnable(GL_DEPTH_TEST);//??
glEnable(GL_BLEND);//??
//glBlendFunc(GLenum sfactor,GLenum dfactor);
//源因子和目标因子是可以通过glBlendFunc函数来进行设置的。
// glBlendFunc有两个参数,前者sfactor表示源因子,后者dfactor表示目标因子。
//前者sfactor表示源颜色,后者dfactor表示目标颜色
//GL_SRC_ALPHA:表示使用源颜色的alpha值来作为因子
//GL_ONE_MINUS_SRC_ALPHA:表示用1.0减去源颜色的alpha值来作为因子(1-alpha)
glBlendFunc(GL_SRC_ALPHA,GL_ONE_MINUS_SRC_ALPHA);
//OpenGlRenderState 创建一个相机的观察视图,模拟相机
pangolin::OpenGlRenderState s_cam(//定义投影和初始模型视图矩阵
//ProjectionMatrix 前两个参数是相机的宽高,紧接着四个参数是相机的内参,最后两个是最近和最远视距
pangolin::ProjectionMatrix(1024,768,500,500,512,389,0.1,1000),
//ModelViewLookAt 前三个参数是相机的位置,紧接着三个是相机所看的视点的位置,最后三个参数是一个向量,表示相机的的朝向
pangolin::ModelViewLookAt(0,-0.1,-1.8,0,0,0,0.0,-1.0,0.0)
);
//在窗口创建交互式视图
pangolin::View &d_cam=pangolin::CreateDisplay().SetBounds(0.0,1.0,pangolin::Attach::Pix(1.0),1.0,-1024.0f/768.0f).
//SetBounds() 前四个参数是视图在视窗中的范围(下 上 左 右),建议动手改改参数就明白了
SetHandler(new pangolin::Handler3D(s_cam));
// SetHandle设置相机的视图句柄,需要用它来显示前面设置的 “相机” 所 “拍摄” 的内容
while (pangolin::ShouldQuit()==false)
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);//清除屏幕(颜色缓冲、深度缓冲)
d_cam.Activate(s_cam);//激活显示,并设置状态矩阵
glClearColor(1.0f,1.0f,1.0f,1.0f);
glLineWidth(2);//线宽
for(size_t i=0; i< gt.size();i++)
{
glColor3f(0.0f, 0.0f, 1.0f);//blue for 真实轨迹
glBegin(GL_LINES);
auto p1=gt[i],p2=gt[i+1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
for(size_t i=0;i<esti.size();i++)
{
glColor3f(1.0f, 0.0f, 0.0f); // red for 估计轨迹
glBegin(GL_LINES);
auto p1=esti[i],p2=esti[i+1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame();
usleep(5000);//休眠5ms
}
}
运行结果如下:
绝对误差 rmse= 2.20728

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐

 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)