slam 基础之机器人学中的坐标转换学习总结
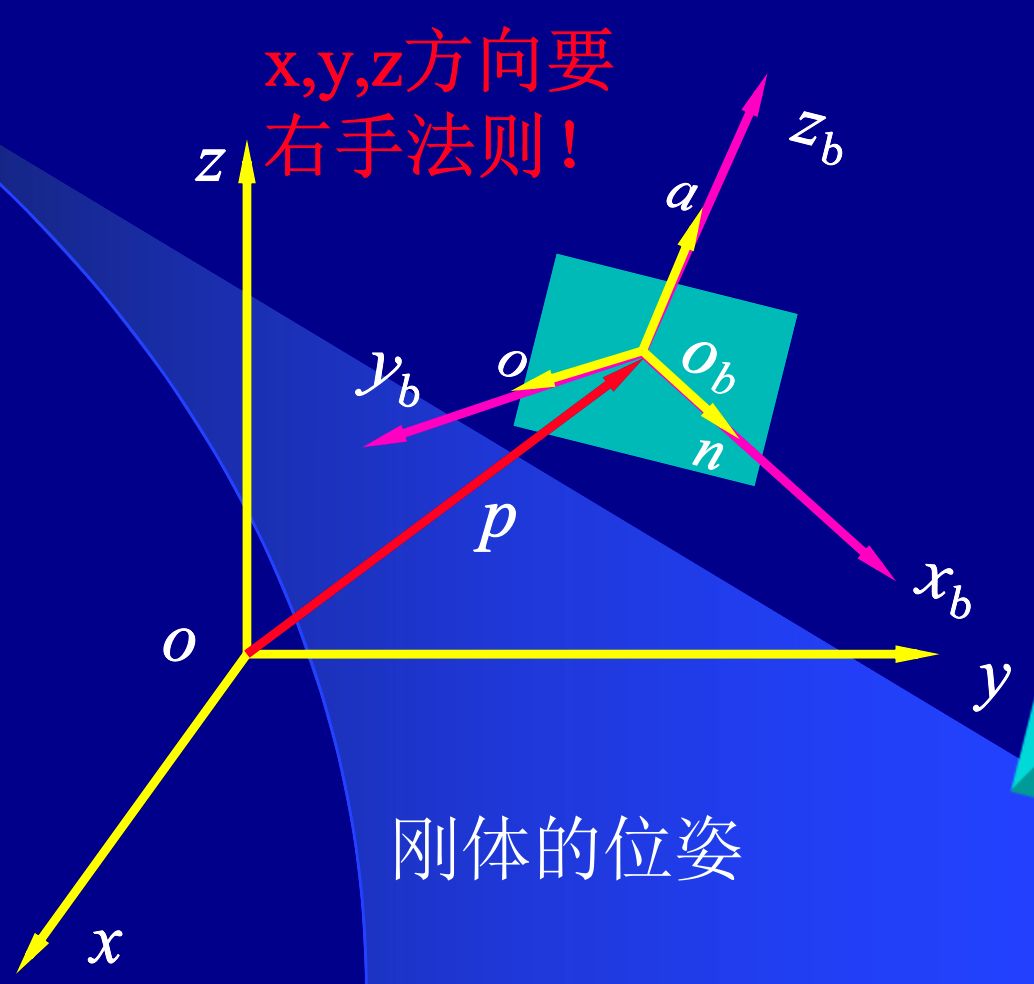
原文:机器人的位姿描述与坐标变换一、刚体位姿1. 刚体位姿:将描述刚体的3个位置自由度和3个方位即姿态自由度简称为刚体位姿。2. 刚体位姿描述方法:(1)建立坐标系(2)位置描述刚体的位置可以用一个3x1的矩阵来表示,即刚体坐标系原点Ob在基坐标系o-xyz中的位置。刚体的位置描述为:(3)姿态描述用刚体坐标系的三个方向单位矢量n ,o, a,的方向余弦矩阵表示。方向余弦矩阵书写为:此方向余弦矩阵
常用的坐标系是右手系,ros中也是如下图:

坐标变换:
习惯上,我们表示一个物体的三维位置和朝向时,都会在其身上附一个随动的坐标系.所以描述一个物体在坐标系中的位置和朝向,总是可以等效为描述物体自身坐标系和别的坐标系之间的关系.
一般的坐标系转换主要为平移转换和旋转转换
可以看看 机器人坐标转换
齐次坐标 齐次坐标的理解 讲的不错。
公众号上的两篇文章:
另外一篇整理如下:
一、刚体位姿
1. 刚体位姿:将描述刚体的3个位置自由度和3个方位即姿态自由度简称为刚体位姿。
2. 刚体位姿描述方法:
(1)建立坐标系
(2)位置描述
刚体的位置可以用一个3x1的矩阵来表示,即刚体坐标系原点Ob在基坐标系o-xyz中的位置。
刚体的位置描述为:![]()
(3)姿态描述
用刚体坐标系的三个方向单位矢量n , o, a, 的方向余弦矩阵表示。
方向余弦矩阵书写为:

此方向余弦矩阵又称之为旋转矩阵。
(4)R正交性
由于旋转矩阵R的三个列向量n , o, a, 都是单位矢量,且双双相互垂直,因此旋转矩阵R的9个元素满足6个约束条件(正交条件):
n.n=o.o=a.a=1
n.o=o.a=a.n=0
可见,旋转矩阵R是正交矩阵(Orthogonal Matrix),且R满足如下条件:
![]()
(5)刚体位姿描述
用4×4的齐次矩阵来表示刚体位姿,此矩阵称为刚体位姿矩阵。

二、机器人位姿描述

机器人手部的位姿可以用刚体位姿矩阵表示为:

三、正交坐标变换
1. 正交坐标变换的一般形式

点 p 在基础坐标系和刚体坐标系的位置矢量分别表示为:

![]() 与
与![]() 之间的变换关系为:
之间的变换关系为:
![]()
从刚体坐标系到基础坐标系的一般变换关系式可以表示为:
![]()
例题:如图所示,b坐标系原点与基础坐标系o-xyz的原点重合,x轴与xb轴之间的夹角为θz,另外,z轴与zb轴重合。
求:表示b系相对于基础坐标系o-xyz的位置矢量x0和旋转矩阵R,并求空间一点P=[u v w]T从b系到基础坐标系o-xyz的一般变换表达式。

解:(1)位置矢量x0=0。
(2)求旋转矩阵R

b系相对于基础坐标系o-xyz的旋转矩阵R为:

(3)从b系到基础坐标系o-xyz的一般变换表达式为
![]()

2. 绕坐标轴的旋转矩阵
(a)绕x轴旋转θ角的旋转矩阵


(b)绕y轴旋转θ角的旋转矩阵


(c)绕z轴旋转θ角的旋转矩阵


3. 绕任意轴的旋转矩阵

4. 绕两个坐标轴旋转的变换矩阵
(1)相对动坐标系的变换顺序:
1)j系先绕着i系的z轴旋转θ角,得到m系;
2)绕新m系的x轴旋转α角,得到变换后的j系。

总的变换矩阵为:R=R(z,θ).R(x,α)
(2)相对定坐标系的变换
1)先绕参考坐标系i系的x轴旋转α角,得到n系;
2)再将n系绕参考z轴旋转θ角,得到j系。

总的变换矩阵为:R=R(z,θ).R(x,α)
(3)总结:
坐标变换相对动系时,总变换矩阵中旋转矩阵相乘的顺序和变换顺序一致,变换矩阵右乘;
相对固定参考系时,总变换矩阵中旋转矩阵相乘的顺序和变换顺序相反,变换矩阵左乘。
5. 绕三个坐标轴旋转的变换矩阵
(1)基于欧拉角的欧拉变换
用欧拉角φ、θ、Ψ来规定一个转动序列所得到的变换。
欧拉变换顺序可以是:

于是可以得到:

此时欧拉变换矩阵为:

欧拉变换可以是Z-X-Z的顺序,也可以是其他的顺序,查阅wiki百科可以得到其他变换顺序的欧拉变换矩阵。

当欧拉变换矩阵给定后,我们可以反向求解出欧拉角。
以Z-Y-Z变换顺序为例,此时欧拉变换矩阵为:

反求欧拉角可以得到:

(2)RPY变换

横滚(Roll):将船的行驶方向取为z轴,则绕z轴的旋转(α角)称横滚(回转);
俯仰(Pitch):把绕y轴的旋转(β角)称为俯仰(Pitch);
偏转(Yaw):而把铅直方向取为x轴,将绕x轴的旋转(γ角)称为偏转或侧摆(Yaw)。
RPY变换:将机器人操作臂手爪恣态用RPY角来表示,而手部与此相应的变换称为RPY变换。
RPY变换的旋转顺序:绕固定参考系的x轴回转γ角,再绕固定参考系的y轴转β角,最后绕固定参考系的z轴转α角。它们的总变换为:

通过RPY逆变换(即已知RPY变换矩阵),可以求解出RPY的三个旋转角γ、β和α。

得到 
四、齐次坐标变换
1. 齐次坐标



2. 齐次变换(Homogeneous transform)
由平移和旋转组成的刚体运动的坐标变换一般关系式为:
![]()
用齐次坐标表示从坐标![]() 到基坐标
到基坐标![]() 的变换为:
的变换为:

简写为:
![]()
其中:![]()
这个变换称之为齐次变换。
其中矩阵A称之为齐次变换矩阵。
3. 平移齐次变换
平移齐次变换矩阵可以表示为:

齐次平移变换为:
![]()
例题:已知向量U=3i+4j+6k沿向量P=2i+5j-k平移,求:平移变换后生成的新向量V。

解:若用矢量相加,可以得到:
V=U+P=(3+2)i+(4+5)j+(6-1)k=5i+9j+5k
若用齐次平移变换,可以得到:

4. 旋转齐次变换
旋转齐次变换矩阵可以表示为:



例题:已知齐次坐标系中一点U=[7,3,2,1]T,将此点绕Z轴旋转90度,再绕y旋转90度,求:旋转变换后所得的点W。
解:本题中是相对固定参考系的旋转,所以变换矩阵应该左乘。

5. 平移加旋转的齐次变换
例题:空间某点的位置矢量为U=[a,b,c,1]T,它按如下顺序完成转动和移动:(1)绕z轴转动90°;(2)绕x转动90°;(3)沿着x, y, z 轴进行移动,[d,e,f]T。求:完成复合运动后的新位置矢量V。
解:本题中是相对固定参考系的旋转,所以变换矩阵应该左乘。
V= Trans(d, e, f)Rot(x, 90°)Rot(z, 90°)U

五、坐标变换的相对性
![]()
![]()
这种坐标变换的实现是具有相对性的,可以相对于定坐标系,也可以相对于动坐标系。这种相对性具有普遍性。
(1)相对于定坐标系的变换实现
O2先绕基坐标绕的z轴旋转90度,相对基础坐标系平移(1,1,0),最后得坐标系O2-x2y2z2。

相对于定坐标系
(2)相对于动坐标系的变换实现
O2先相对基坐标平移(1,1,0) ,再绕新坐标系的z轴旋转90度,最后得到坐标系O2-x2y2z2。

相对于动坐标系
六、坐标变换的逆变换
从坐标![]() 到基坐标
到基坐标![]() 的齐次变换为:
的齐次变换为:

则其逆坐标变换为将基坐标系向量![]() 变换为刚体坐标系向量
变换为刚体坐标系向量![]() :
:

这需要求出齐次变换矩阵A的逆矩阵![]() :
:
从刚体坐标系到基础坐标系的一般变换关系式可以重新表述为:
![]()
由于旋转矩阵R是正交矩阵,所以
![]()
于是可以得到:
![]()
写成齐次变换的矩阵形式

于是得到齐次变换矩阵A的逆矩阵:

七、多坐标间的齐次变换及位姿变换方程
1. 多坐标系间的齐次变换
例题:如图所示,要求将空间一点P点从c系变换到b系,再将其由b系变换到基础参考系。求:其坐标变换。

解:


多坐标系间变换公式的推广:

![]()
我们称此式为齐次坐标变换方程式 。
总的变换矩阵为:
![]()
2. 机器人的位姿变换方程

建立机器人坐标系统,相应的变换矩阵有:
![]()
工具坐标系E相对通用坐标系U的位姿,可以通过两种变换方法实现:
![]()
![]()
以上两式联立,
![]()
于是,机械手H相对于基座B的位姿可以表示为:
![]()
例题:一个棱柱体的原始位置如图所示,变换前定系和动系是重合的,棱柱体在动系中的位姿可用6个点的齐次坐标所组成的矩阵来描述为

让棱柱体先绕Z轴转90°,再绕Y轴转90°,最后沿X方向平移4。

求:变换后的棱柱体的位姿。
解:总变换矩阵为

棱柱体上的六个点经变换后:

变换后的棱柱体如下图所示

至此,机器人的位姿描述和坐标变换内容介绍完毕。

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 13
13 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)