V-rep机器人仿真(Win10):UR5+RG2+Kinect+YOLOV3+DDPG+Pytorch(第二部分:Vrep与python的联调)
声明:作为V-rep机器人仿真的初学者,看到博主Ianlande 的相关博客,故转载。欢迎大家访问原博客这是一个V-rep机器人仿真实验,较为简单,适合初学者在入门图像识别、机器学习、机器人学的内容时进行学习与训练。实验涉及的内容有:V-rep机器人仿真,YOLOV3图像识别,强化学习DDPG,UR5机械臂及RG2机械手,Kinect摄像头。使用环境:Win10,Pytorch0.4,V-rep整
声明:作为V-rep机器人仿真的初学者,看到博主Ianlande 的相关博客,故转载。欢迎大家访问原博客
这是一个V-rep机器人仿真实验,较为简单,适合初学者在入门图像识别、机器学习、机器人学的内容时进行学习与训练。
实验涉及的内容有:V-rep机器人仿真,YOLOV3图像识别,强化学习DDPG,UR5机械臂及RG2机械手,Kinect摄像头。
使用环境:Win10,Pytorch0.4,V-rep
整个实验一共由多篇文章组成,本文是第二部分。
第二部分:V-rep与python联调
这部分我们主要解决如何将V-rep与python联调
V-rep的编程方式有以下几种:

我们使用python语言编写,所以第一步先将V-rep与python联调,这样才可以用python控制V-rep里面的机械臂
我们需要这下面三个文件:
- remoteApi.dll
- vrep.py
- vrepConst.py
先找到V-rep的文件目录,我使用的是V-REP 3.0 Windows版,所以是一个叫V-REP3的文件夹,一般默认在C盘或D盘的Program Files里面
remoteApi.dll所在的目录是:
V-REP3\V-REP_PRO_EDU\programming\remoteApiBindings\lib\lib\Windows\32Bit(如果你电脑是32位)
V-REP3\V-REP_PRO_EDU\programming\remoteApiBindings\lib\lib\Windows\64Bit(如果你电脑是64位)
vrep.py和vrepConst.py所在的目录是:
V-REP3\V-REP_PRO_EDU\programming\remoteApiBindings\python\python
如果找不到就直接搜索也行
最后得到三个文件:

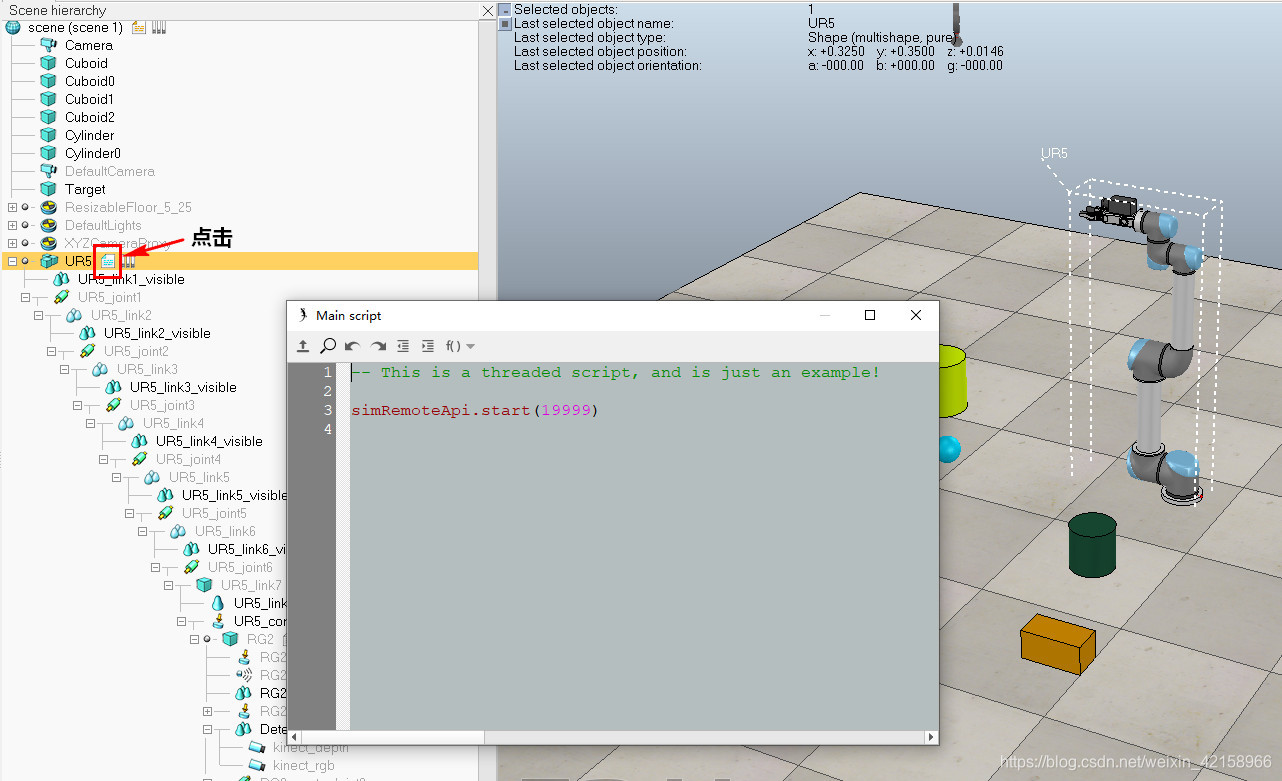
然后我们打开之前搭好的环境,修改UR5的脚本程序,程序只有一行,如下:
simRemoteApi.start(19999)
如图:
到目前为止,我们就实现了V-rep与python联调,接下来就可以编程控制里面的机械臂了。
我们可以测试一下是否联调成功:
还是在V-REP3\V-REP_PRO_EDU\programming\remoteApiBindings\python\python这个目录下,可以找到simpleTest.py这个程序:

按照以下步骤执行:
- 先启动vrep仿真


- 启动成功后,在终端运行
simpleTest.py这个文件:
结果是:
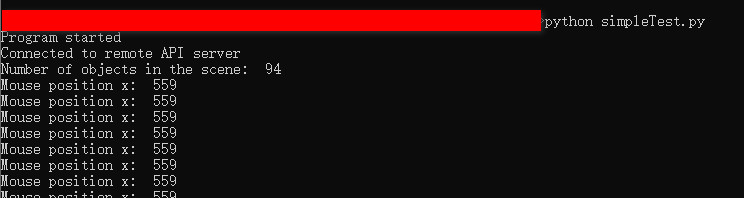

便证明联调成功。
请注意顺序:先启动仿真,再在终端运行程序,仿真不启动,程序是无法正常运行的

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 3
3 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)