
基于Matlab的单闭环直流调速系统仿真实验设计
基于Matlab的单闭环直流调速系统仿真实验设计参考文献
参考文献
[1]陈伯时. 电力拖动自动控制系统 [M]. 北京:机械工业出版社,2004.
1 仿真过程
1.1 仿真对象:单闭环直流调速系统
直流电动机采用型号Z4-132-1,额定电压,额定电流,额定转速为2610r/min,反电动势系数0.14559,允许过载倍数1.5 ;PWM变换器开关频率:8KHz,放大倍数:107.5;直流母线电压为538V。电枢回路总电阻:0.368Ω;时间常数:电枢回路电磁时间常数0.0114s,电力拖动系统机电时间常数0.18s;转速反馈系数0.00383Vmin/s;对应额定转速时给定的电压10V。
1.2 仿真总图

1.3 仿真结果
1.3.1 给定负载
对给定负载用分别采用比例调节器和比例积分调节器进行仿真。给定负载为额定负载,即设置step1Id的值为52.2。其中比例调节器即将比例积分调节器的积分一路断开即可。

图1 比例控制时空载启动转速波形

图2 比例积分控制时空载启动转速波形
表一 比例与比例积分空载启动时稳态静差和动态性能进行比较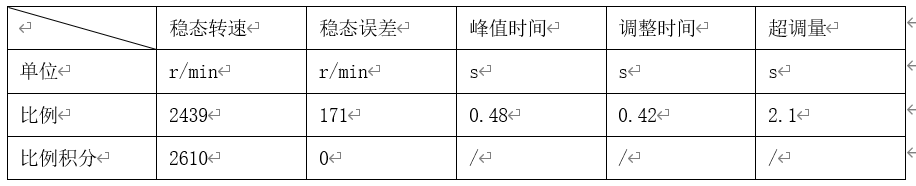
分析可图1、图2、表一,比例积分控制器在稳定之后转速n=2610r/min,等于额定转速,为无静差系统。而单纯的比例控制器在稳定后转速达不到额定转速,属有静差系统。这是因为比例调节器的输出只取决于输入偏差量的现状,而积分调节器的输出包含了输入偏差量的全部历史,因此积分控制可以实现无静差调速。由上表可知,相较于比例,比例积分的稳态性能好,动态性能较差。比例部分能够迅速响应控制作业,积分部分则最终消除稳定误差但会在一定程度上影响动态性能。
1.3.2 突增负载
对突增负载用分别采用比例调节器和比例积分调节器进行仿真。在上述基础上在4s时突增50%的负载,也即在step2处加一个发生在四秒时刻大小为26.1的阶跃。

图3 比例控制时空载启动时转速、转速调节器、电流输出波形
图4 比例控制时负载突增时转速、转速调节器、电流输出波形

图5 比例积分控制空载启动时转速、转速调节器、电流输出波形
图6 比例积分控制负载突增时转速、转速调节器、电流输出波形
1.4 仿真分析
当负载突增时,积分控制的无静差调速系统动态过程曲线如图六。在稳态运行时,转速偏差电压必为零。如果不为零,则继续变化,就不是稳态了。在突加负载引起动态速降时产生,达到新的稳态时,又恢复为零,但 已从上升到 ,使电枢电压由 上升到 ,以克服负载电流增加的压降。
比例积分控制综合了比例控制和积分控制两种规律的优点,又克服了各自的缺点,扬长避短,互相补充。比例部分能迅速响应控制作用,积分部分则最终消除稳态偏差。
2 结论
在有静差转速负反馈单闭环直流调速系统中,由于采用P调节器,稳态时转速只能接近给定转速值,而不可能完全等于给定的转速值。提高开环增益只能减小转速降落而不能完全消除转速降落。为了完全消除转速降落,实现转速无静差调节,采用PI调节器代替P调节器,就构成无静差转速负反馈直流调速系统.而本文用Matlab/Simulink仿真技术实现了上述有静差和无静差转速单闭环直流调速系统的仿真建模,并给出了转速调节器参数改变时调速系统的仿真分析结果。实验结果表明,单闭环直流调速系
统的调速性能仿真结果和理论上推导的调速性能相一致。

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐


 32
32 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)