算法--UR机器人位姿表示
算法--UR机器人位姿表示1 简介2 位姿2.1 旋转矢量2.2 关节角3参考1 简介UR是协作机器人的鼻祖也是至今市场占比最高的品牌。博主使用过,性能确实很好,实用性很强,如今进入协作机器人行业的公司很多,2019年上海工博会得知,有70家,其实能做好的不多。2 位姿2.1 旋转矢量2.2 关节角3参考1、算法–机器人学导论2、等效轴角坐标系表示法3、UR机器人之一:坐标系...
·
1 简介
UR是协作机器人的鼻祖也是至今市场占比最高的品牌。
博主使用过,性能确实很好,实用性很强,如今进入协作机器人行业的公司很多,2019年上海工博会得知,有70家,其实能做好的不多。
2 位姿
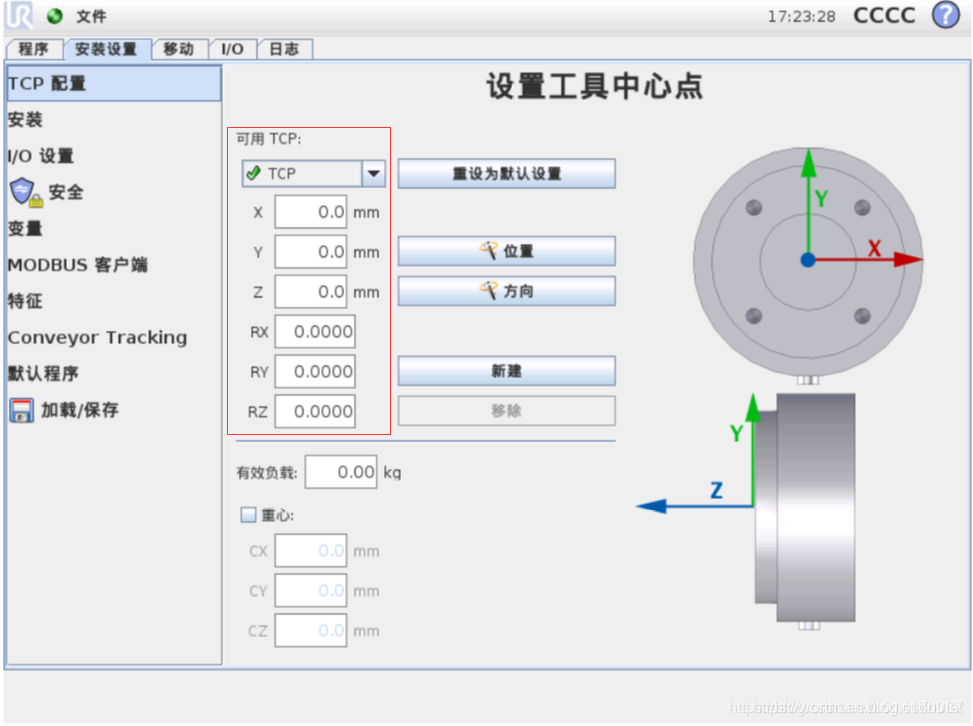
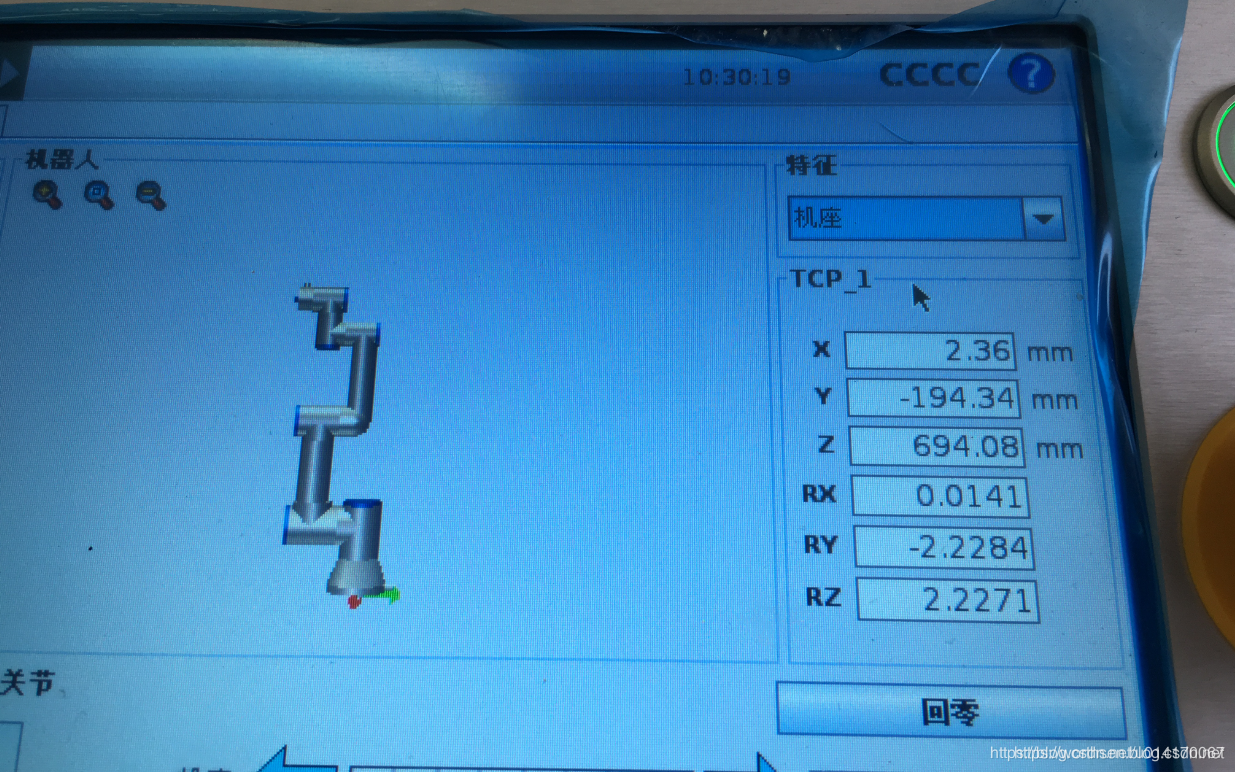
UR机器人的Pose表示的是TCP坐标系相对于基座标系的位置和姿态。
一个坐标系相对于另一个坐标系的姿态的表示方法有很多种,比如:X-Y-Z固定角,Z-Y-X欧拉角,RPY角,四元数等。而UR机器人里面使用的是旋转矢量法。
2.1 旋转矢量
x, y, z, Rx, Ry, Rz
(x, y, z)表示位置
(Rx, Ry, Rz)旋转矢量表示两个坐标系之间的旋转关系
2.2 关节角
(θ1, θ2, θ3, θ4, θ5, θ6)表示6个关节角度
2.3 UR图示

3 运算
3.1 旋转矢量2旋转矩阵
- 详见《机器人学导论》
- 详见Hugoool博主UR机器人之一:坐标系及位姿表示方法
- 详见mazhengg博主等效轴角坐标系表示法
- 详见博主自己算法–机器人学导论
3.2 关节角2旋转矩阵
- 详见《机器人学导论》
- 详见五百年前的招魂夺魄博主6轴机器人运动学正解,逆解1
3.3 旋转矩阵求逆

参考
1、算法–机器人学导论
2、等效轴角坐标系表示法
3、UR机器人之一:坐标系及位姿表示方法
4、《机器人学导论》
5、6轴机器人运动学正解,逆解1
6、齐次变换矩阵逆矩阵的快速求解方法

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 2
2 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)