- @zAnllYrAbIo
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
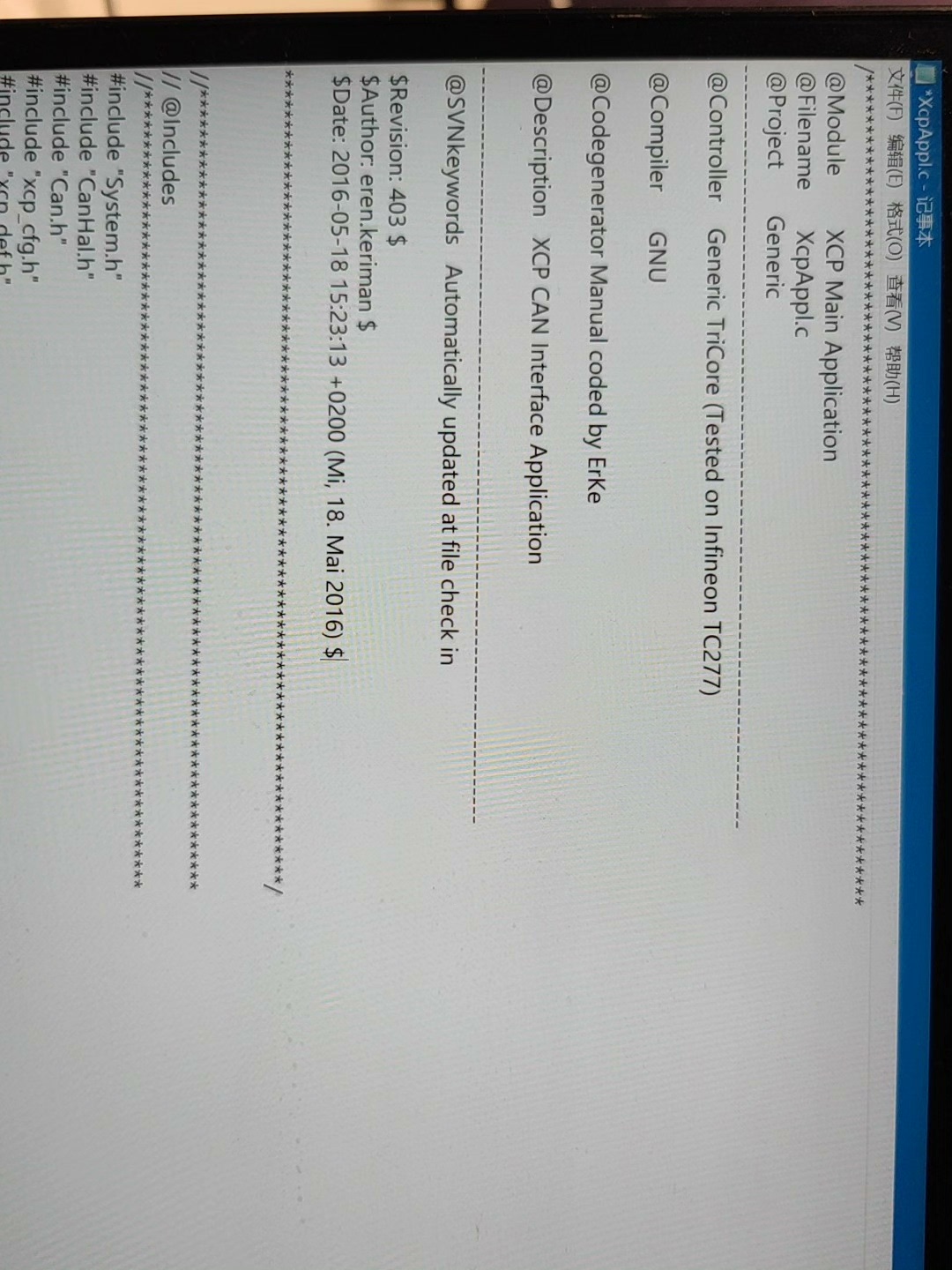
A2L 文件采用特定的语法结构描述 ECU 的标定信息。它主要包含头文件部分、模块定义部分、数据对象定义部分等。// ECU 名称// 作者// 创建日期头文件部分记录了 ECU 的基本信息,这些信息对于标定工具理解 ECU 来源等很有帮助。// 换算方法名称/* 线性转换公式 */// 将原始值转换为电压值,乘以 0.1// 测量值名称// 内存地址// 数据类型// 引用换算方法这里定义了一个
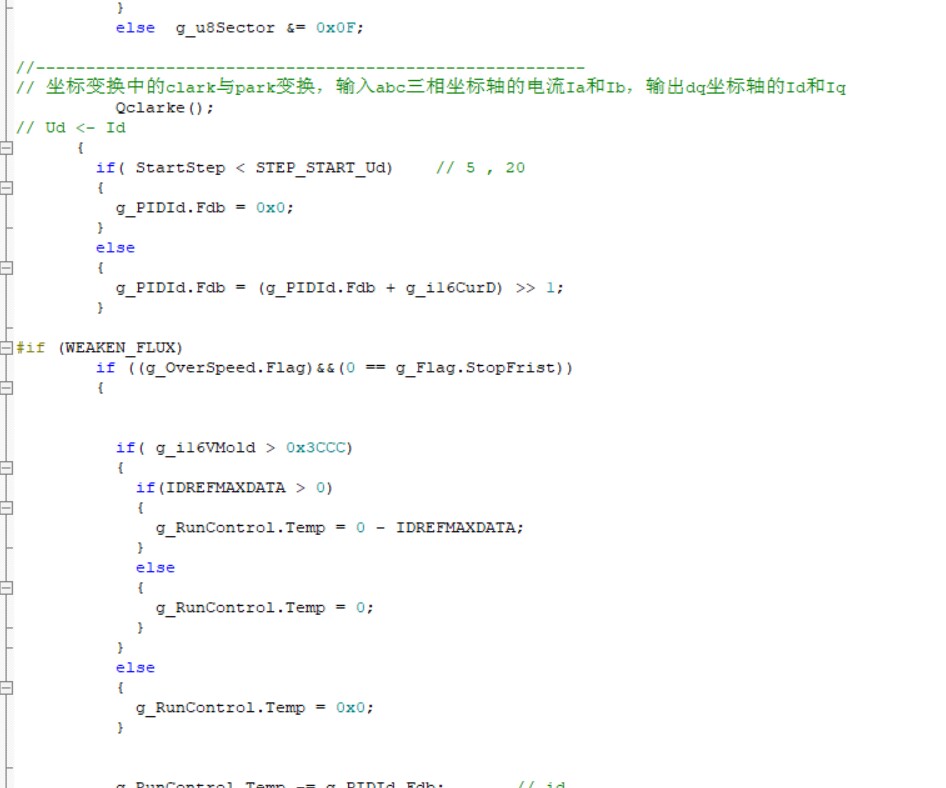
最后说个实战技巧:调试霍尔信号时,用P1.5脚的复用功能抓取波形,配合示波器的单次触发模式,能清晰捕捉到电机换相时的毛刺信号。遇到电机抖动,先把电流环的PI参数乘以0.6,再慢慢回调,比教科书上的调试法见效快三倍。整套方案BOM成本控制在35块以内,比传统方波方案贵不了几包烟钱,但骑行体验那是质的飞跃——尤其是爬坡时的线性加速,谁用谁知道。看这个驱动走线,采用"先胖后瘦"策略:MOS管G极铺铜宽度
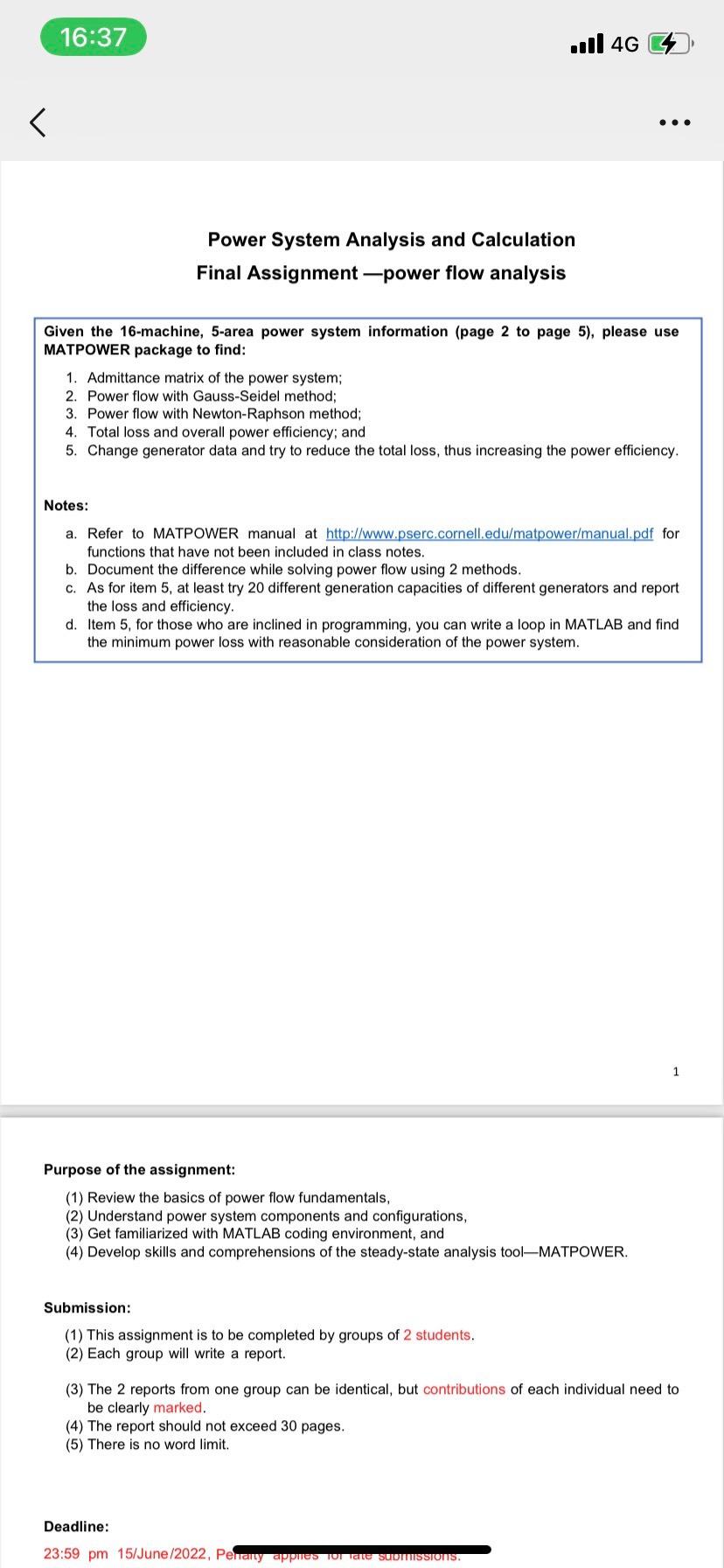
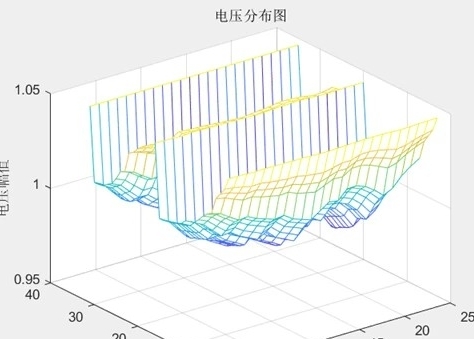
通过本次实践,我们不仅掌握了如何使用Matpower进行潮流计算,还深入理解了IEEE69节点系统的结构和参数设置。这为我们今后进行更复杂的电力系统分析打下了坚实的基础。希望这篇博文能为你的学习和研究提供一些启发和帮助。matpower应用:IEEE69节点系统潮流计算,主要是文档包括:1.ieee69节点设计好参数的程序文件2.自己编写的word(具体内容详见目录)
该代码的创新性体现在双层优化架构上,从输电和配电两个层面,时间和空间两个维度综合考虑电动汽车的充放电行为。同时,充分考虑了风电出力的不确定性,研究不同场景下的优化调度,为实际电力系统中大规模电动汽车接入以及风电并网提供了有价值的参考方案。这种全面且细致的优化思路,对于提升电力系统运行效率和稳定性具有重要意义。MATLAB代码:基于双层优化的电动汽车优化调度研究关键词:双层优化选址定容 输配协同 时
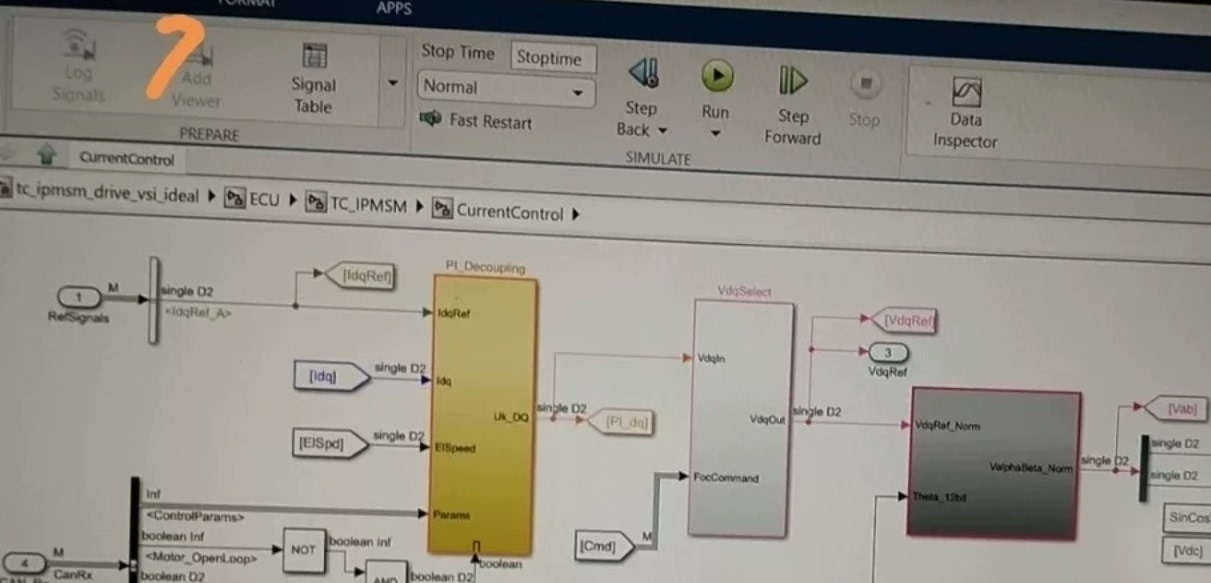
博世电驱仿真模型,同步电机和异步电机模型,相电流完美波形 博世汽车电驱仿真模型,同步电机和异步电机模型,相电流完美波形,自动计算弱磁模型调用各种脚本进行foc控制,正反转切换电流无波动(运行前要加载tc_ipmsm_config.m)最近在研究博世汽车电驱仿真模型,着实被其中同步电机和异步电机模型的精妙设计惊艳到了。今天就来和大家分享一下我的发现。
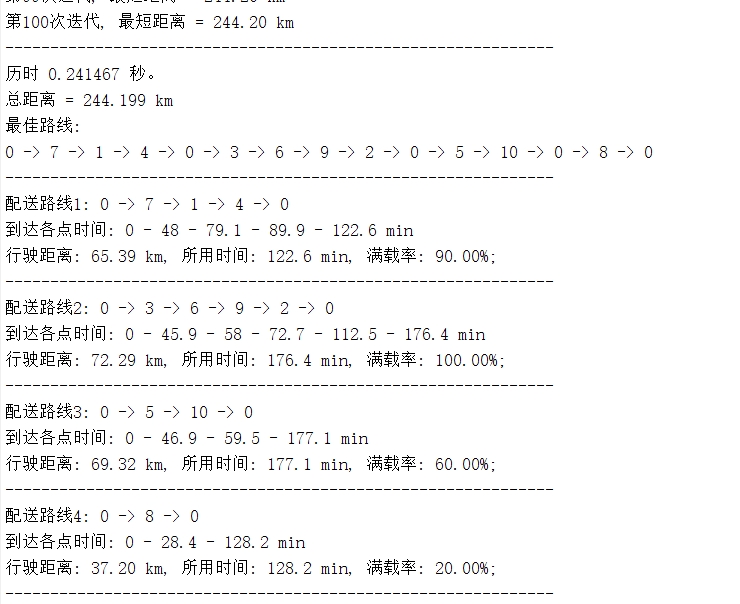
碰到路径突然暴涨的情况,记得检查距离矩阵是不是对称的——现实中的单行道问题会让矩阵不对称,这个坑我掉进去过三次...进阶到带容量约束的CVRP问题时,编码方式就要变了。个人经验是先用聚类算法(比如K-means)分区,再在每个分区内做路径规划,最后用动态规划调整区域边界点。今天咱们就聊聊怎么用各种智能算法解决不同等级的车辆路径规划问题(VRP),顺手撸点代码片段方便各位直接实操。vrptw:带距离
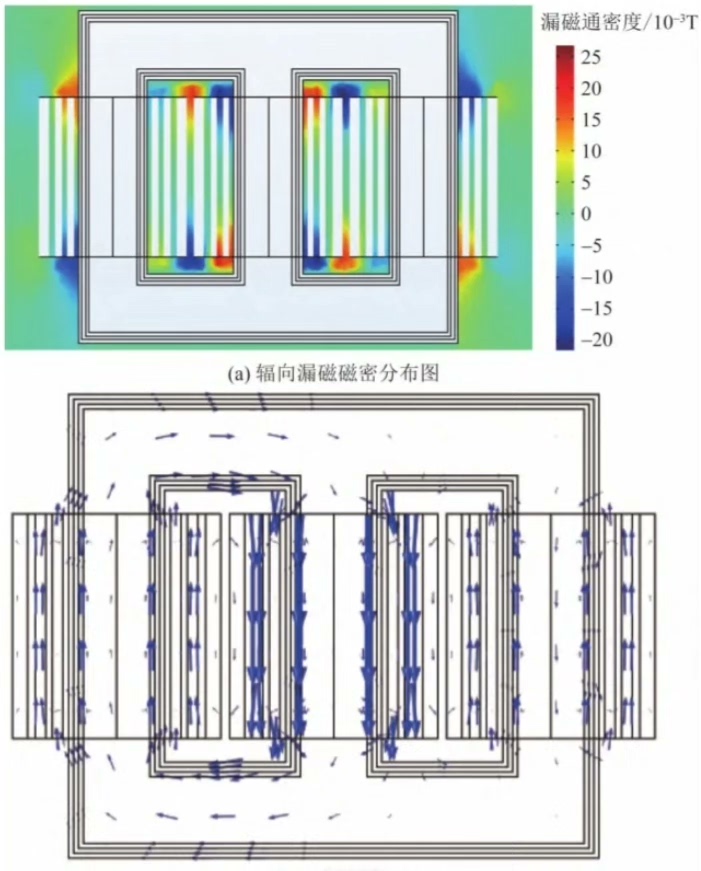
利用COMSOL软件建立变压器对称短路的三维计算模型,再对变压器在突发三相短路时变压器内部漏磁场分布及绕组承受的轴向电磁力进行仿真计算并分析。利用COMSOL软件建立变压器对称短路的三维计算模型,再对变压器在突发三相短路时变压器内部漏磁场分布及绕组承受的轴向电磁力进行仿真计算并分析。为了研究变压器发生高压对中压绕组三相短路工况下的内部漏磁场分布,通过瞬态场仿真得到短路后的铁心位置磁密体分布。为了研
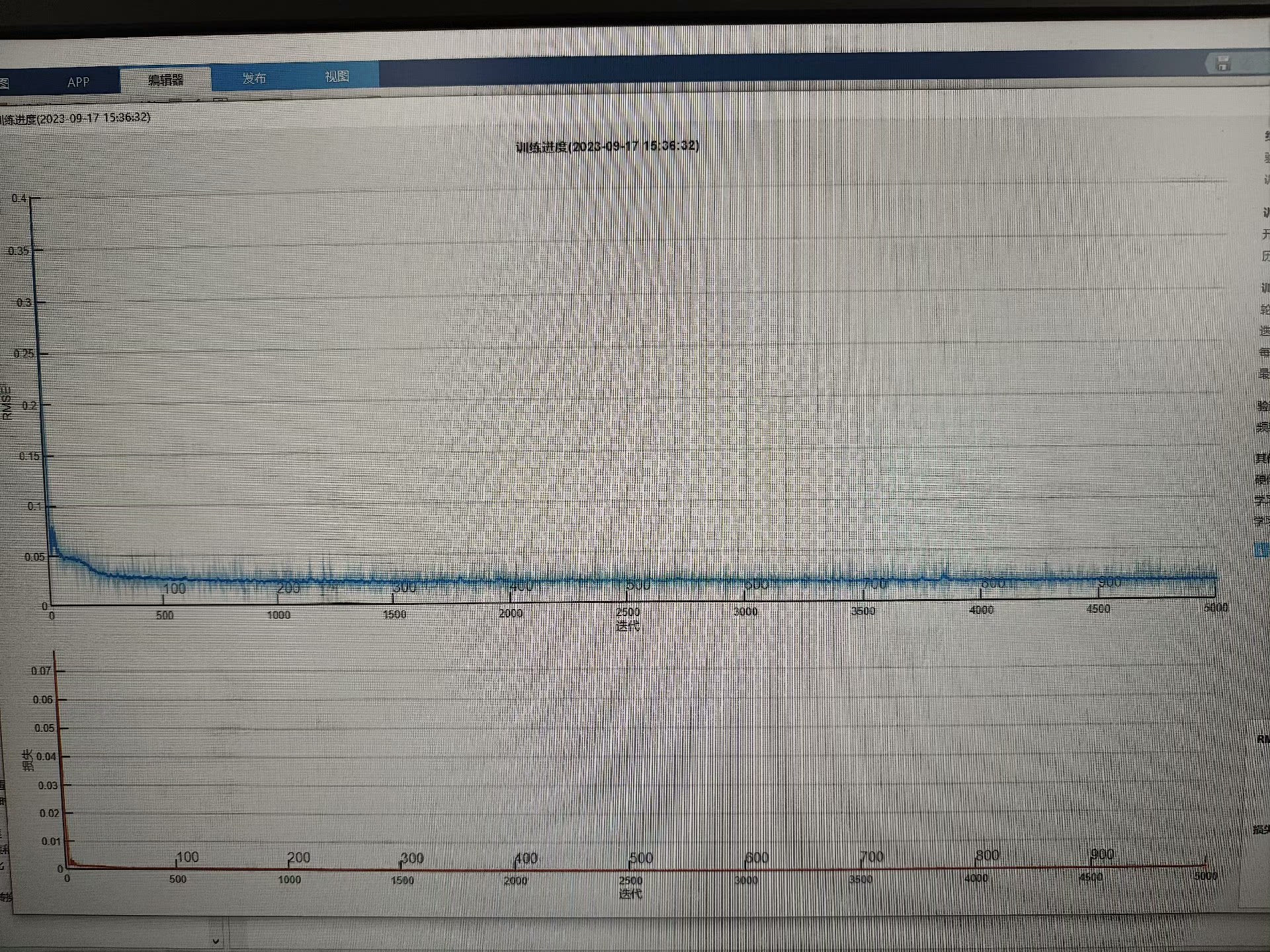
这个CNN-BiLSTM-SE模型在处理时间序列预测问题时表现不错,尤其是结合了SE注意力机制后,模型能够更好地捕捉到重要的特征。当然,实际应用中还需要根据具体的数据和任务进行调整和优化。代码部分其实并不复杂,关键是要理解每个模块的作用。希望这篇文章能帮到你,如果有任何问题,欢迎留言讨论!
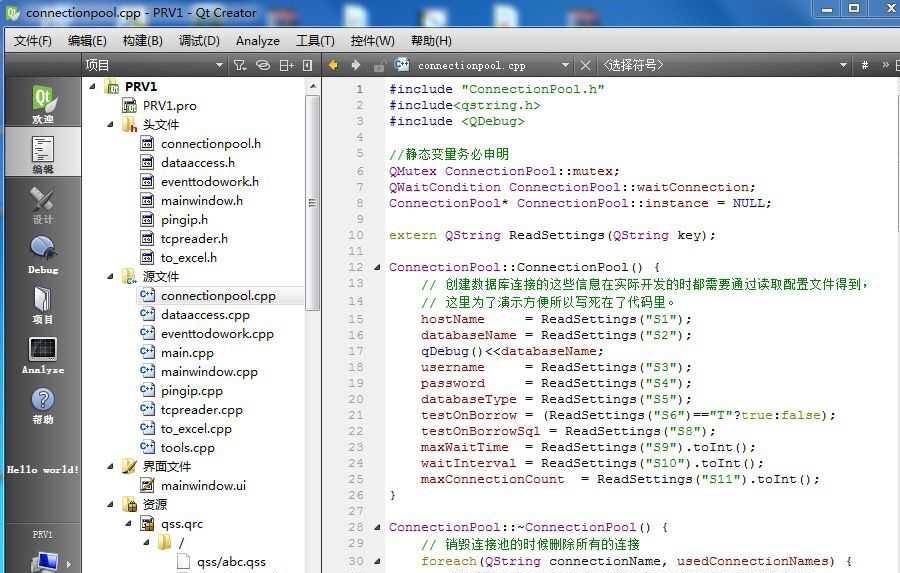
一套完整工程,链接PLC,工业无人值守自动扫码使用,无线扫码枪SR1000的使用,使用qt5.14,用qtcreator加载工程后,编译,运行,可调试可扩展,目的是学习qt开发方式。一套完整工程,链接PLC,工业无人值守自动扫码使用,无线扫码枪SR1000的使用,使用qt5.14,用qtcreator加载工程后,编译,运行,可调试可扩展,目的是学习qt开发方式。\\t\\t\\t左侧边栏点击项目,
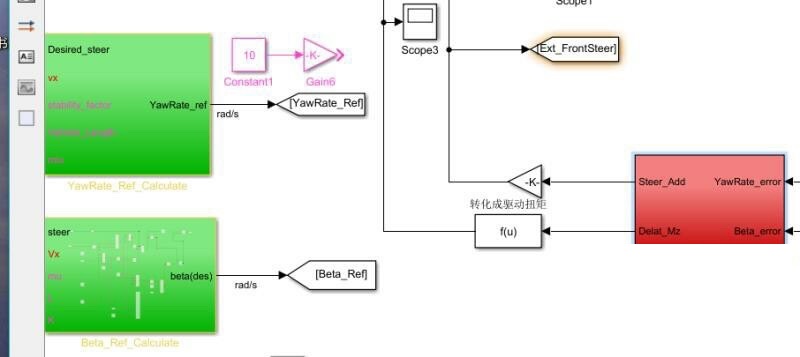
LQR算法在四轮独立驱动横摆角速度控制中有着重要的应用价值,它基于二自由度动力学方程,通过巧妙设计控制器实现横摆角速度的跟踪。对于想要入门车辆动力学控制算法的朋友来说,是一个绝佳的起点。同时,与MPC、SMC等算法的对比,也能帮助我们在不同场景下选择最合适的控制策略。希望大家通过不断实践,能在这个有趣的领域收获更多成果!