写文章
登录
写文章
开直播
登录社区云
登录社区云,与社区用户共同成长
CSDN账号登录
邀请您加入社区
立即加入
欢迎加入社区
@weixin_47758983
fy.ch
关注
2023-08-21 14:34:11 加入 DevPress
抖音号:
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
文章列表
讨论/问答
关注
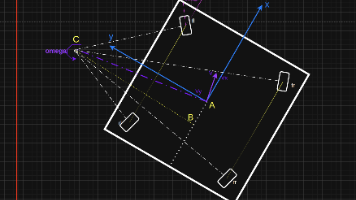
四舵轮全向移动机器人运动学逆解
本文分析四舵轮移动机器人底盘的运动学逆解,并通过webots仿真验证有效,项目开源。
#机器人
到底了