
写文章




- @weixin_47517950
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
两轮差速移动机器人位姿误差状态方程推导
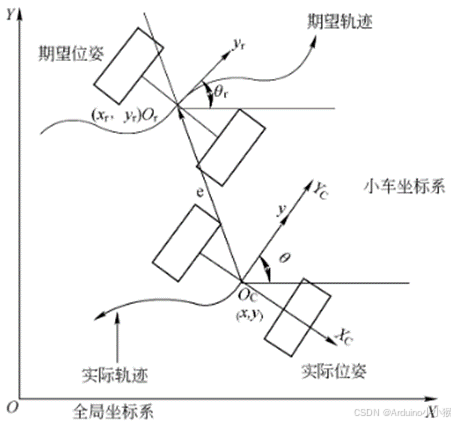
就是e_y,其次,还要知道v_x=vcosθ用于第一行的代换。笔者就是一直没有搞清楚e_y和(y_r - y)不是一个含义导致证明不下去,写这篇文章也是加深记忆。[1]周星,吴洪明.AGV轨迹跟踪自适应模糊控制器设计[J].起重运输机械,2017,(07):19-22.图 机器人行驶轨迹偏差图[1]
两轮差速移动机器人位姿误差状态方程推导
就是e_y,其次,还要知道v_x=vcosθ用于第一行的代换。笔者就是一直没有搞清楚e_y和(y_r - y)不是一个含义导致证明不下去,写这篇文章也是加深记忆。[1]周星,吴洪明.AGV轨迹跟踪自适应模糊控制器设计[J].起重运输机械,2017,(07):19-22.图 机器人行驶轨迹偏差图[1]
到底了