




- @weixin_43455581
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Power PMAC中正逆运动学的实现1. 为什么要使用正逆运动学 ?2. 怎样创建正逆运动学子程序 ?3. 如何编写运动学程序?3.0 预备工作3.1 逆运动学3.2 正运动学3.3 运动学在C语言中的实现4. 官方例程讲解5. 机械臂运动学讲解声明
Power PMAC中PLC程序及子程序的编写1. PLC程序的编写2. 使能和关闭PLC程序的方法3. PLC中运行运动程序的方法4. PLC调用子程序的方法5. 子程序的编写
状态机,通俗的讲可以理解为一种建模方法。当一个逻辑非常复杂的程序放在面前,是非常令人头大的,使用状态转移图(是一个有向图形,包括各节点和状态转移条件)可以很好的梳理流程。以博主的理解,实现状态转移图的模块我们便可以称之为状态机。
该错误,是由于远程服务器端口无GUI页面导致的报错。

它是基于著名的 Matplotlib 库(Python 中广泛使用的绘图库)构建的,旨在提供类似于 Matplotlib 的功能,但专门为 C++ 设计。Matplot++ 支持多种图表类型,包括线图、散点图、条形图、直方图、误差线图等,使数据可视化在 C++ 应用程序中变得简单。
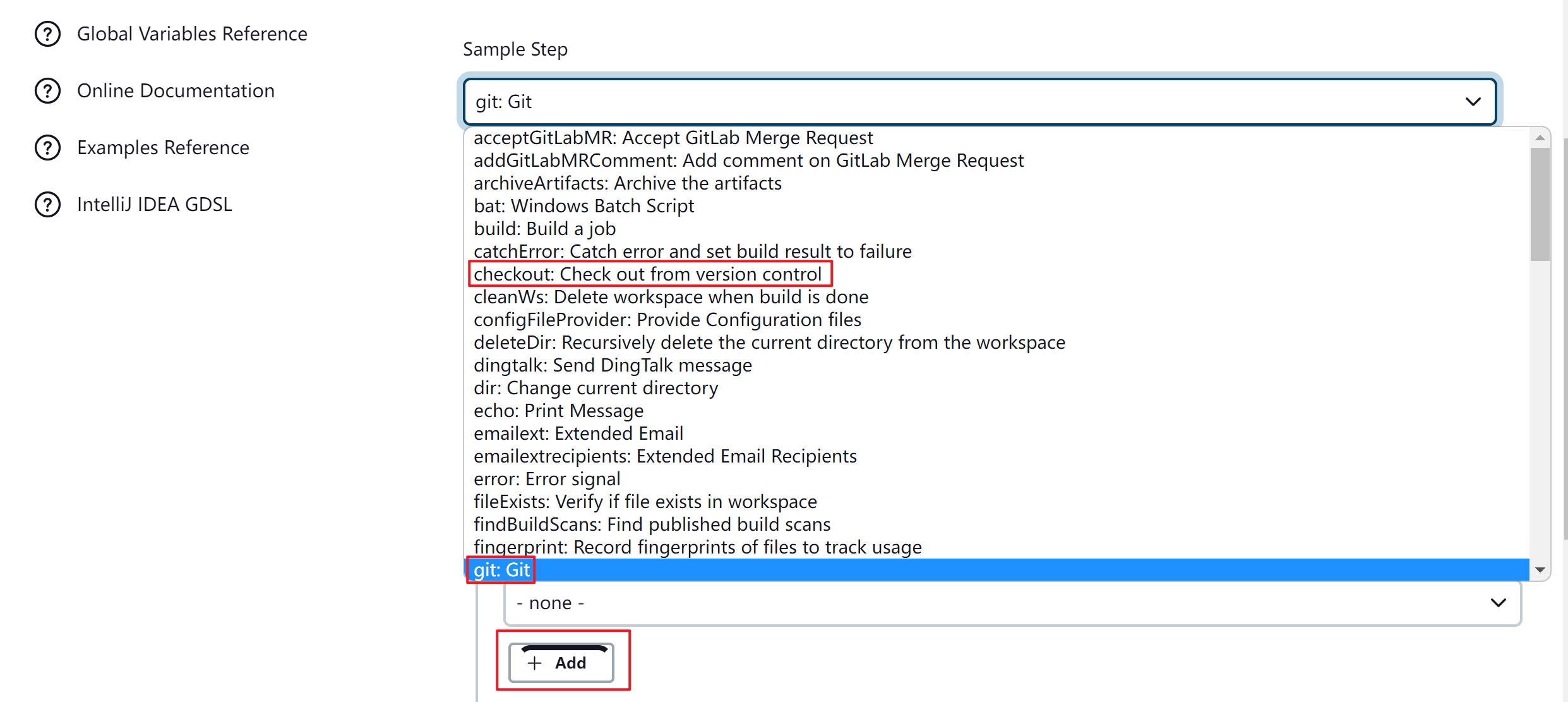
点击选择git:Git或,然后选择下方-none-处已经添加的用户名跟密码,若未添加,则使用下方Add进行添加在下方使用进行语法生成,如下:即为我们需要的用户字符串。
【代码】git下载单个文件或文件夹。
【代码】Jenkins中使用git submodule时报fatal: could not read Username for 'xxxx': No such device or address的解决方案。

本质上是C++调用python,该库将调用过程封装成了类,便于我们使用。
法1:Ctrl + Shift + O法2:大纲或者:【Shift+Ctrl+P】→ 【View: Quick Open View】 → 【大纲】参考链接:https://www.jmwww.net/a/17270.htmlhttps://blog.csdn.net/songchuwang1868/article/details/86318128https://www.zhihu.com/ques