登录社区云,与社区用户共同成长
邀请您加入社区
该用户还未填写简介
暂无可提供的服务
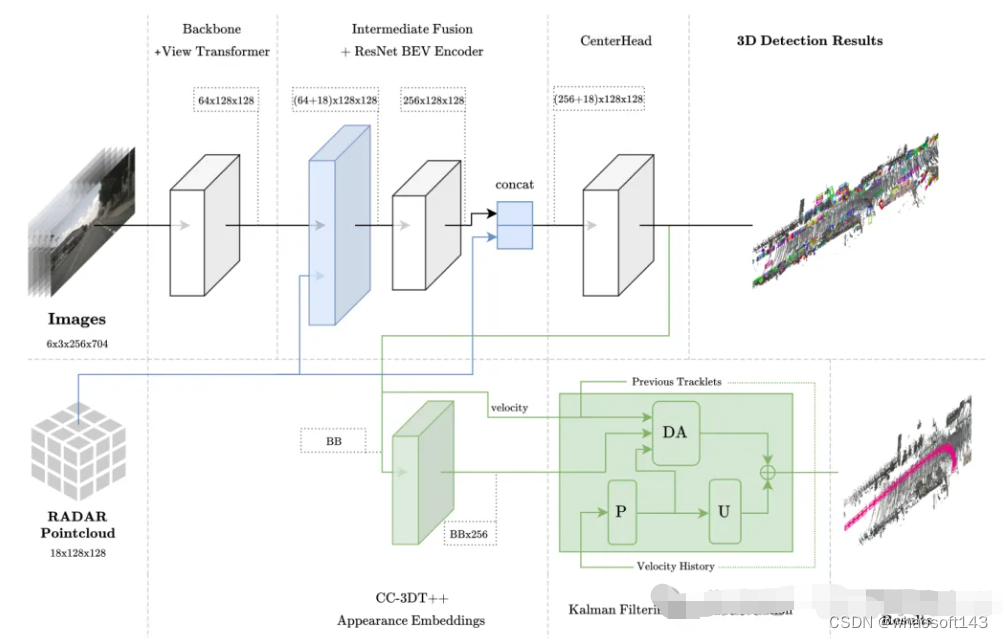
本文介绍了一种用于3D目标检测和多目标跟踪的相机-毫米波雷达融合方法(CR3DT)。基于激光雷达的方法已经为这一领域奠定了一个高标准,但是其高算力、高成本的缺陷制约了该方案在自动驾驶领域的发展;基于相机的3D目标检测和跟踪方案由于它的成本较低,也吸引了许多学者的关注,但是检测效果较差。因此,将相机与毫米波雷达融合正在成为一...