- @weixin_40425595
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本项中机器人做客户端,PC做服务端。

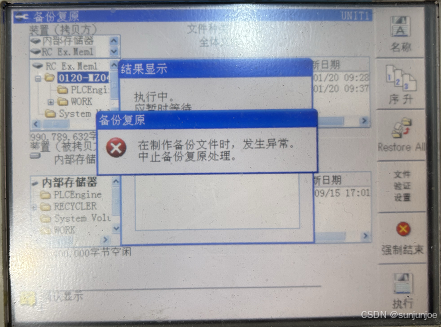
【代码】Nachi_那智机器人_“备份还原”过程中提示备份失败。
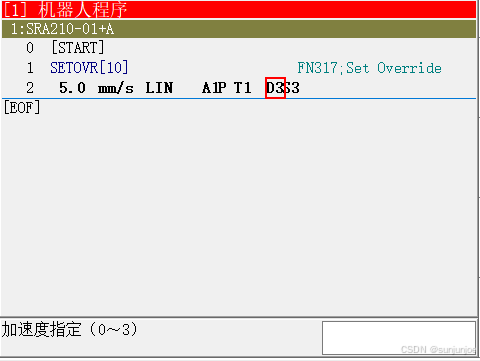
这里需要向各位说明的是:我司机器人坐标体现形式是X、Y、Z、r、p、y,这的r对应Rz(下图中Z轴周围旋转量),p对应Ry(下图中Y轴周围旋转量),y对应Rx(下图中X轴周围旋转量),这个问题还体现在LETR指令上,当用FN按键输入该指令时,可以看到它内部参数的顺序是:X、Y、Z、Rx=y、Ry=p、Rz=r;3.获取当前用户坐标系偏移量(当前用户坐标系与基准用户坐标系之间的偏差量),通常我们是通
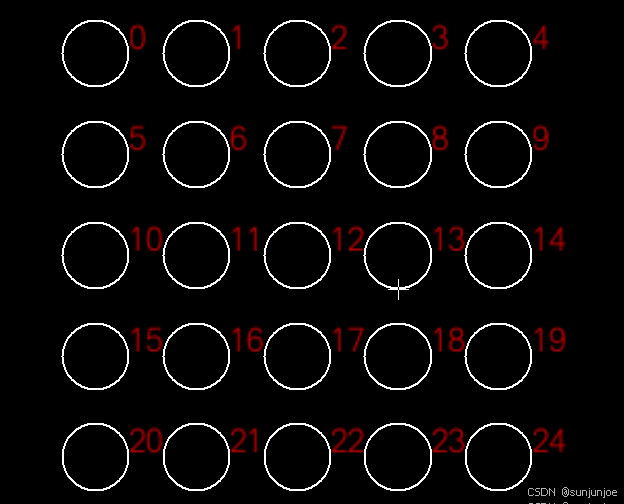
8. 下面,要根据料盘上物料的总量进行设定,由于码垛功能的1“层”最多计99个产品,当我们料盘超过99个时,我们要把料盘分“层”,比如说这次料盘盘为10行*15列,那我们把它分成第1层:10行*8列,第2层10行*7列,请注意,刚才我们分的两层是不同的,因为他们列数不同,因此下图我们把层1和层2的“面图形编号”设置成不同的,即每层单独设定参数,如下图中圈起来的。完成后点击“下一步”7. 下面,我们

【代码】Nachi_那智机器人_用户编程形式实现托盘取料(非码垛指令)
4.方法:获取当前坐标和各轴角度,根据这两组数据判断是否可以在无干涉的情况下直接运行到某一个已示教的点位,如果存在干涉,那么先让机器人往X、Y或者Z方向移动,直至避开干涉,再运行到已示教的点位,既然机器人回到了一个已示教的点位,那接着运行若干已示教的点位必然能回到待命位。3.设置“作业原位置”点位及分配信号:常数设定→领域→作业原位置→可选择”程序参考“即将点位记录到程序内,并通过选择”程序号码“
2.干扰领域: 干扰领域其作用是避免机器人与外围可动设备同时运动时发生干涉撞机的情况,在以往项目中,虽然机器人与PLC有信号互锁,但仍出现过因程序BUG或者人为操作不当出现撞机的情况,因此建议用户在机器人动作范围内存在其他运动设备的情况,使用“干扰领域”,当PLC允许机器人前往干扰i领域内动作前,先给机器人信号,当机器人在干扰领域内时,机器人输出信号。干扰领域可以设置以示教点为中的长方体区域和球体
要验证重复定位精度前需先确认机器人原点姿态是否正确,可先将机器人打到【0°,90°,0°,0°,0°,0°】的姿态,再用原点销依次对每个轴确认原点销是否可顺畅塞入、取出,如有异常,请先对“编码器复位”。通常遇到机器人定位不准问题都是在调试后期带料组装时发生的,这时候手臂治具安装和接线已完成,将其拆除会耗时耗力,此时如果使用千分表验证需要将千分表测头打到靠近机器人法兰面处,以减少误差。千分表测量时可