




- @u014291571
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
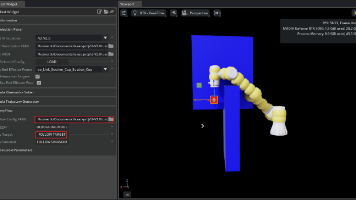
本文介绍了在Isaac Sim中为6轴机械臂安装真空吸盘并调整参数的完整流程。首先通过SolidWorks插件导出URDF模型,创建末端执行器链接并添加真空吸盘组件。接着使用增益调整器优化各关节的刚度和阻尼参数,确保运动稳定性。然后导出URDF文件用于后续应用,并通过Lula工具生成机器人描述参数,配置碰撞体。最后利用Lula运动学测试工具验证末端执行器的目标跟随功能,完成机器人系统的集成与调试。
本文详细介绍了在Isaac Sim中构建真空吸盘模型的完整流程。首先通过创建Xform并添加圆柱体和立方体构建基本模型结构,然后配置D6关节和驱动器参数实现运动控制。接着添加Surface Gripper组件实现吸附功能,并为模型设置质量属性。最后可选地配置表面材质以增强视觉效果。整个过程包含详细的参数设置和操作截图,为机器人仿真中的真空吸盘建模提供了实用指导。
本文详细介绍了在Isaac Sim中构建真空吸盘模型的完整流程。首先通过创建Xform并添加圆柱体和立方体构建基本模型结构,然后配置D6关节和驱动器参数实现运动控制。接着添加Surface Gripper组件实现吸附功能,并为模型设置质量属性。最后可选地配置表面材质以增强视觉效果。整个过程包含详细的参数设置和操作截图,为机器人仿真中的真空吸盘建模提供了实用指导。
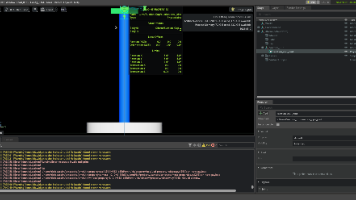
本文介绍了使用SolidWorks URDF导出插件将UR3六轴机械臂CAD模型转换为URDF格式的完整流程。首先需要安装solidworks_urdf_exporter插件,然后在SolidWorks中为机械臂各部件创建参考点、基准轴和坐标系。通过插件设置各连杆参数并导出URDF文件后,还需修改mesh路径使其能被Isaac Sim识别。最后详细说明了如何将URDF模型导入Isaac Sim仿真
