
写文章




- @qq_47142602
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
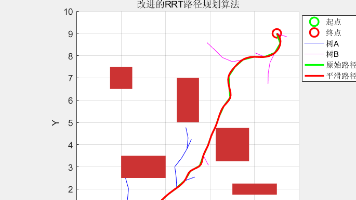
改进的RRT路径规划算法
A[初始化环境与车辆模型] --> B[双向RRT搜索]subgraph B[双向RRT搜索]B1[从起点与终点同步生长两棵树]B2[扩展时进行碰撞<br>与转向角约束检测]B1 --> B2B2 -- 循环扩展 --> B1B2 -- 满足条件 --> B3[两树连接<br>生成初始路径点集]endB --> C[路径后处理]subgraph C[路径后处理]C1[将初始路径点作为<br>B样条
到底了