- @qq_24312945
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了如何使用STM32C562的TIM15输入捕获功能测量TIM1输出的PWM信号频率和占空比。硬件使用自制开发板,主控为STM32C562CET6,通过PA7捕获PA5的PWM信号。配置TIM15_CH1为双沿捕获模式,利用中断回调函数区分上升沿和下降沿,计算PWM周期和占空比。文中详细说明了时钟配置、定时器参数设置、GPIO映射及中断配置步骤,并提供了参考程序和视频教程链接。该方案通过单
本文介绍了如何使用STM32C552的TIM15输入捕获功能测量TIM1输出的PWM信号频率和占空比。实验基于STM32CubeMX配置,通过PA7捕获PA5的PWM信号,同时捕获上升沿和下降沿来计算周期和高电平时间。硬件使用STM32C552CET6开发板,软件配置包括串口通信、定时器参数设置和中断处理。关键步骤包括TIM15输入捕获通道配置、GPIO映射和中断使能,最终通过输入捕获回调函数实现
本文介绍了如何在STM32C542开发板上使用TIM15的输入捕获功能测量TIM1生成的PWM信号频率和占空比。硬件上需要将TIM1的PWM输出(PA5)连接到TIM15的输入捕获通道(PA7)。通过配置TIM15_CH1为双边沿捕获模式,程序可在中断回调中区分上升沿和下降沿,从而计算PWM周期和高电平时间,最终得出频率和占空比。开发环境使用STM32CubeMX进行外设配置,工程编码设置为GBK
本文介绍了基于STM32H503CB的LIS2DW12三轴加速度计开发,重点讲解如何通过中断信号获取加速度数据。主要内容包括:1)使用STM32CubeMX配置硬件接口(I2C、串口、中断引脚);2)初始化加速度计并验证设备ID;3)配置块数据更新模式(BDU)确保数据一致性;4)设置中断信号触发条件。文章提供了完整的开发流程、硬件配置参数和关键代码片段,并附有视频教程和样品申请链接(需加群615

本文将探讨如何使用MotionFX库解析空间坐标。MotionFX库是一种用于传感器融合的强大工具,可以将加速度计、陀螺仪和磁力计的数据融合在一起,实现精确的姿态和位置估计。本文将介绍如何初始化和配置MotionFX库,使用FIFO读取传感器数据,FIFO可以作为数据缓冲区,存储传感器的临时数据。这样可以防止数据丢失,特别是在处理器忙于其他任务时,并利用这些数据进行空间坐标的解析。本章案例使用上节
本文介绍了基于STM32C562CET6开发板,使用STM32CubeMX2配置TIM1定时器输出PWM波形的方法。主要内容包括:通过STM32CubeMX2配置时钟树、DEBUG接口、TIM1定时器的PSC和ARR参数,设置多通道PWM输出(TIM1_CH1和TIM1_CH3),并详细说明了PWM模式、占空比、极性等参数的配置步骤。最后介绍了如何生成项目并导入STM32CubeIDE进行开发。文
本文介绍了在STM32C562开发板上配置串口打印的详细步骤。使用STM32CubeMX2工具生成工程,配置USART1为异步模式(115200波特率,PA9/PA10引脚),并通过重定向_write()函数实现printf输出到串口。主要内容包括:1)使用STM32CubeMX2创建工程并配置时钟树;2)设置DEBUG模式和串口参数;3)导入CMake工程到STM32CubeIDE;4)添加头文
本文介绍了STM32C5系列MCU的BOOT_SEL配置方法,重点分析了BOOT0信号来源的选择机制。主要内容包括:1)BOOT_SEL选项字节的作用,可选择BOOT0信号来自外部引脚或内部Option Bit;2)通过USART1进入Bootloader的硬件连接方法;3)提供了完整的BOOT_SEL配置函数实现流程,包含Flash解锁、错误清除、选项字节编程等关键步骤。该配置对量产维护中的多种
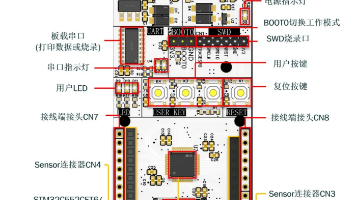
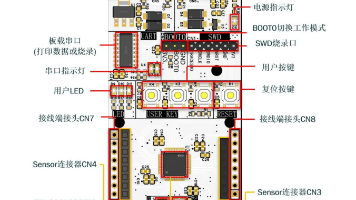
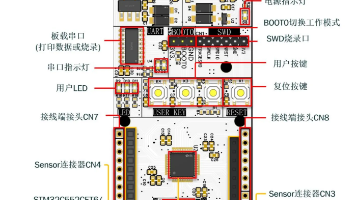
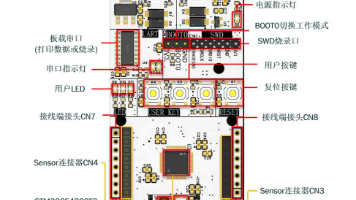
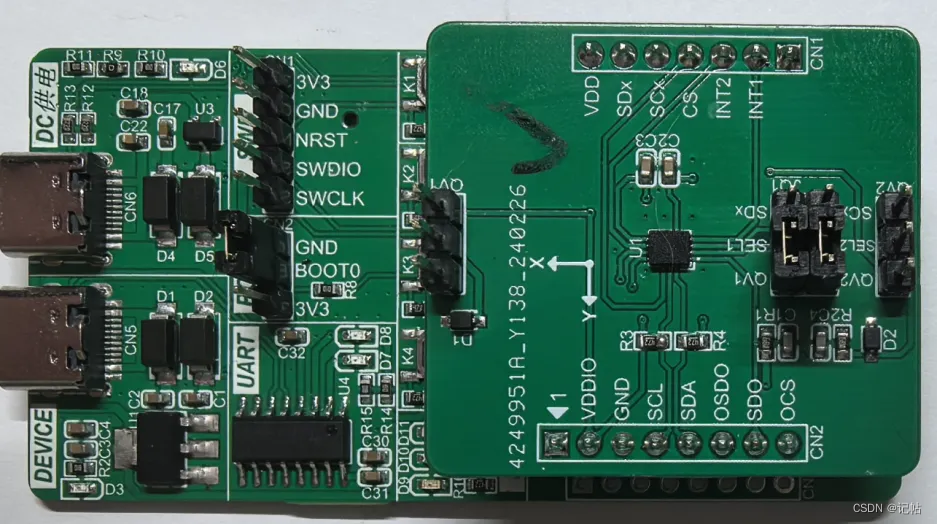
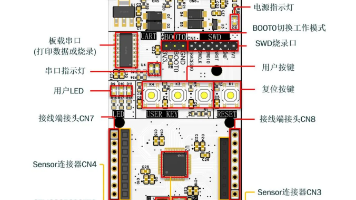
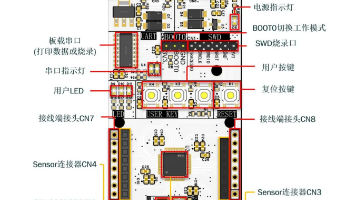
STM32C562 & SENSOR是一款基于STM32C5系列微控制器的评估套件。该微控制器采用了40nm工艺制造,具有更快的FLASH访问,更高的性能以及更低的功耗。此外,该套件具有丰富的接口和外设,以及传感器(SENSOR)系列连接器接口,为开发者提供了便捷且灵活的开发环境。这里通过配置LED输出进行简单测试。需要样片的可以加群申请:925643491 / 615061293。
本文介绍了如何在STM32C552CET6开发板上配置TIM1定时器输出PWM信号,并通过HAL库函数动态修改频率和占空比。主要内容包括:使用STM32CubeMX2配置TIM1的基础参数(时钟源、通道模式、极性等),设置PSC和ARR寄存器以调整PWM频率,以及通过修改CCR值改变占空比。文章还提供了硬件准备说明、时钟树配置、DEBUG设置、多通道PWM配置方法,并详细讲解了工程生成和导入STM