




- @qq_17032807
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要:本文系统探讨了李群与李代数在机器人技术中的应用。首先分析了机器人位姿描述中旋转矩阵和平移矩阵的表示问题,指出矩阵加法运算不封闭导致求导困难。随后介绍了李群作为具有群结构的可微流形的数学定义,以及其与李代数的指数映射关系。重点阐述了特殊正交群SO(3)和特殊欧氏群SE(3)的李代数表示,推导了通过罗德里格斯公式实现的李群与李代数相互转换方法。最后总结了李代数求导的优势及其在机器人位姿优化中的重
T-S模糊技术(Takagi-Sugeno模糊模型)是一种基于模糊逻辑的系统建模方法,由日本学者Takagi和Sugeno于1985年提出。该技术通过将非线性系统分解为多个局部线性子系统,并利用模糊规则进行整合,实现对复杂系统的精确建模与控制。T-S模糊技术可以广泛用于非线性机器人系统的线性化建模,以便后续控制器的优化设计。
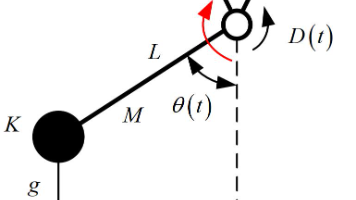
1. 机器人系统模型假设一个二连杆机械臂结构如图所示。其中,机械臂的质量主要富集于机器人关节处,分别为:、;机械臂连杆长度分别为:、;机械臂关节运动为纯旋转,所以仅存在为角度的广义坐标:、;重力加速度为:。根据定义拉格朗日方程:其中,L为拉格朗日函数,而K为系统广义动能,P为系统广义位能;为连杆子系统索引号();为第个子系统的动能和位能的坐标(位移和角度),为相应的广义速度(线速度和角速度);为第
Shoulder complex linkage mechanism for humanlike musculoskeletal robot armsShuhei Ikemoto1, Yuya Kimoto2, and Koh Hosoda1Graduate School of Engineering Science, Osaka University摘要:人体的肩关节复合体由肩胛骨、锁骨、肱骨、
Design and control of a pneumatic musculoskeletal biped robotXizhe Zang∗, Yixiang Liu, Xinyu Liu and Jie ZhaoState Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin, Heilon
本文在第一部分概述了用于执行在轨机器人任务的空间操纵器的制导、导航和控制(GNC)方法,包括但不限于在轨服务、卫星/站组装、探测外星物体和空间碎片减缓。简要介绍了一些空间任务的概念,讨论了空间机器人是最实用和通用的解决方案之一。一个在轨机器人任务的共同阶段被确定为:近距离交会,姿态同步,目标识别,机械手部署,捕获,如果需要,捕获后机动。对每个阶段提出或适用的重要GNC方法进行了广泛的审查。本文重点
Anthropomorphic musculoskeletal 10 degrees-of- freedom robot arm driven by pneumatic artificial musclesArne Hitzmann, Hiroaki Masuda, Shuhei Ikemoto & Koh HosodaGraduate School of Engineering Scie
A Survey on Applications of Pneumatic Artificial MusclesGeorgios Andrikopoulos, Georgios Nikolakopoulos and Stamatis Manesis19th Mediterranean Conference on Control and Automation摘要:本文综述了气动人工肌肉(PAMs)的
Anthropomorphic Muscular–Skeletal Robotic Upper Limb for Understanding Embodied IntelligenceKoh Hosoda ∗, Shunsuke Sekimoto, Yoichi Nishigori, Shinya Takamuku and Shuhei IkemotoDepartment of Multimedi
柔性肌骨机器人结构在感觉获取方面的优势Shuhei Ikemoto • Yoichi Nishigori • Koh HosodaArtif Life Robotics摘要:形态计算是一个设计良好的硬件能够承担部分机器人控制和每次感知所需的计算成本的概念。到目前为止,许多肌肉骨骼机器人已经被开发的灵感来自人类的一个,并显示出优越的运动性能。人工肌肉(PAMs)的使用是实现这些高性能的关键。此外,P