




- @m0_70415573
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文提出基于UWB技术的智能仓库AGV高精度定位方案,采用TDOA/TWR混合算法实现厘米级定位(误差≤15cm)。通过5G边缘计算、卡尔曼滤波和机器视觉融合提升系统稳定性,结合动态路径规划实现多AGV协同调度。方案包含防爆型UWB基站部署(6.5/8GHz多频段)、车载双标签配置、AI智能调度及电子围栏安全系统。实施后预计提升仓库作业效率40%,减少碰撞事故95%,已在鞍钢冷轧厂等项目中验证定位

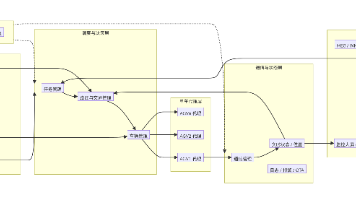
多车调度系统上位机的核心,就是做一个“车队大脑 + 交通警察 + 业务接口”:上面接 MES/WMS/ERP,下面接各 AGV 单车上位机,左边管任务(谁干、何时干),右边管交通(谁先走、避撞、防死锁),再加上地图/模型、监控诊断、配置运维这几块支撑。
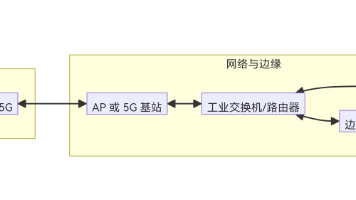
AGV/AMR 的无线通信一般要满足三类需求:1)实时控制:刹车、避障、停止等命令要求毫秒级时延和高可靠性;2)业务数据上报:状态、任务反馈、日志;3)多媒体/边缘计算:部分场景需要上传图像给服务器做 AI 识别,或接收模型推理结果。工业实践里,常用 Wi‑Fi、5G/LTE、Zigbee/BLE、UWB 等组合使用,以满足不同链路的“带宽–时延–覆盖–成本”约束。
AGV/AMR 的无线通信一般要满足三类需求:1)实时控制:刹车、避障、停止等命令要求毫秒级时延和高可靠性;2)业务数据上报:状态、任务反馈、日志;3)多媒体/边缘计算:部分场景需要上传图像给服务器做 AI 识别,或接收模型推理结果。工业实践里,常用 Wi‑Fi、5G/LTE、Zigbee/BLE、UWB 等组合使用,以满足不同链路的“带宽–时延–覆盖–成本”约束。
AGV/AMR 的无线通信一般要满足三类需求:1)实时控制:刹车、避障、停止等命令要求毫秒级时延和高可靠性;2)业务数据上报:状态、任务反馈、日志;3)多媒体/边缘计算:部分场景需要上传图像给服务器做 AI 识别,或接收模型推理结果。工业实践里,常用 Wi‑Fi、5G/LTE、Zigbee/BLE、UWB 等组合使用,以满足不同链路的“带宽–时延–覆盖–成本”约束。
本文提出基于UWB技术的智能仓库AGV高精度定位方案,采用TDOA/TWR混合算法实现厘米级定位(误差≤15cm)。通过5G边缘计算、卡尔曼滤波和机器视觉融合提升系统稳定性,结合动态路径规划实现多AGV协同调度。方案包含防爆型UWB基站部署(6.5/8GHz多频段)、车载双标签配置、AI智能调度及电子围栏安全系统。实施后预计提升仓库作业效率40%,减少碰撞事故95%,已在鞍钢冷轧厂等项目中验证定位
本文提出基于UWB技术的智能仓库AGV高精度定位方案,采用TDOA/TWR混合算法实现厘米级定位(误差≤15cm)。通过5G边缘计算、卡尔曼滤波和机器视觉融合提升系统稳定性,结合动态路径规划实现多AGV协同调度。方案包含防爆型UWB基站部署(6.5/8GHz多频段)、车载双标签配置、AI智能调度及电子围栏安全系统。实施后预计提升仓库作业效率40%,减少碰撞事故95%,已在鞍钢冷轧厂等项目中验证定位
摘要:麦克纳姆轮是一种可实现全向运动的特殊轮组,其45°斜置辊轮结构通过四个轮子的协同控制,使AGV获得前进、平移及旋转能力。系统包含驱动控制、感知定位和决策规划三大模块,采用矩阵运算建立运动学模型,通过精确控制各轮转速实现多种运动模式。关键技术包括高精度速度控制、姿态稳定、定位补偿和容错控制,确保AGV在复杂环境中的灵活运动与精确定位。该技术显著提升了AGV的机动性和作业效率。
