写文章
登录
写文章
开直播
登录社区云
登录社区云,与社区用户共同成长
CSDN账号登录
邀请您加入社区
立即加入
欢迎加入社区
@m0_63671696
小羊君爱摸鱼
关注
2023-10-10 21:46:29 加入 DevPress
抖音号:
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
文章列表
讨论/问答
关注
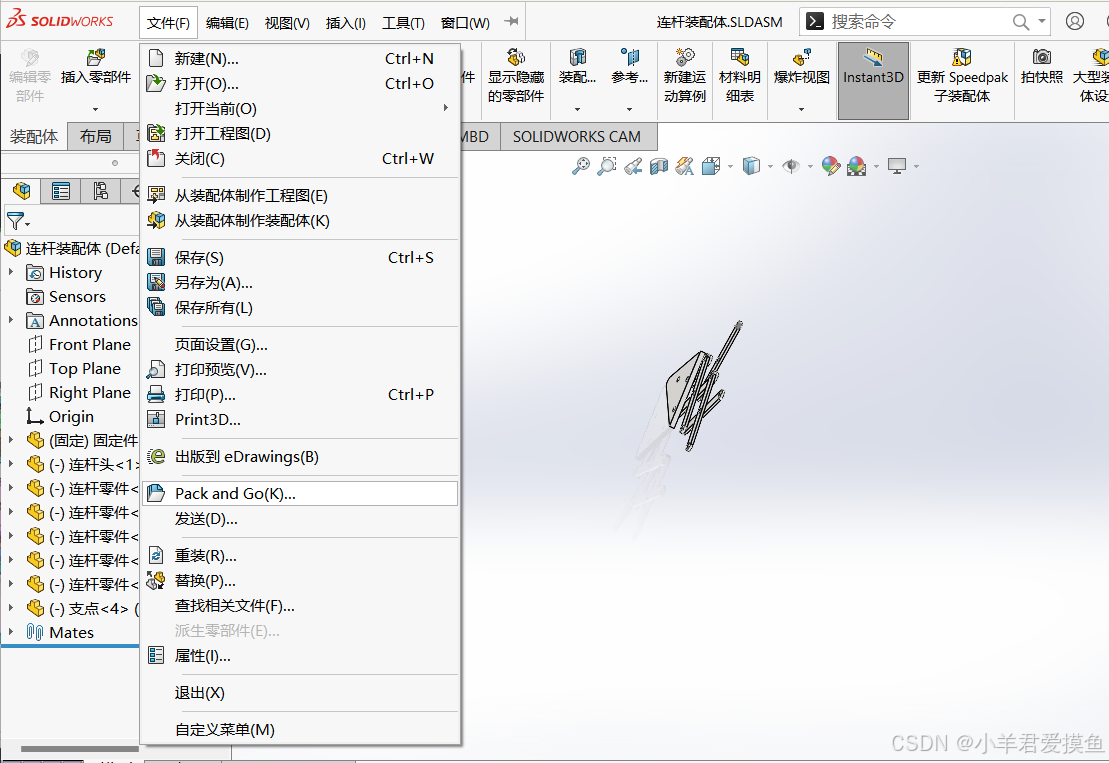
soliderWorks平面连杆设计
2. 对每条直线分别执行:创建块。5. 拖动块即可自由移动查看效果。1. 创建一个草图随便画几条线。
#学习
到底了