
写文章




- @m0_53203771
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
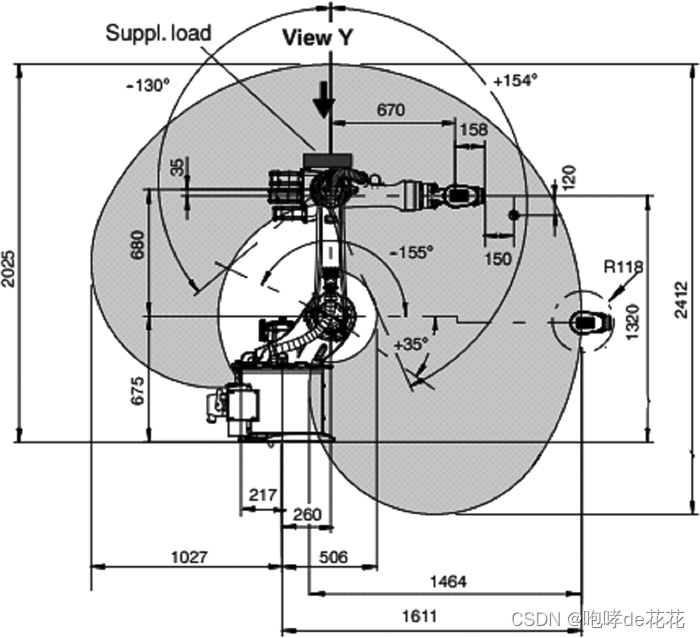
KUKA_kr16机器人建模正逆解及轨迹规划——matlab机器人工具箱
1.KUKA_kr16机器人本体结构2.建立DH坐标系3.matlab机器人建模3.1设置初始姿态对Link函数里面的offset参数进行设定,对各关节进行关节偏移量的设定,来使模型的初始姿态与我们设想的一样。偏移值为DH参数表中的theta项matlab代码如下:clearclc%thetadaalpha%标准DH建模L(1)=Link('d',0,'a',0.260,'alpha',-pi/2
KUKA_kr16机器人建模正逆解及轨迹规划——matlab机器人工具箱
1.KUKA_kr16机器人本体结构2.建立DH坐标系3.matlab机器人建模3.1设置初始姿态对Link函数里面的offset参数进行设定,对各关节进行关节偏移量的设定,来使模型的初始姿态与我们设想的一样。偏移值为DH参数表中的theta项matlab代码如下:clearclc%thetadaalpha%标准DH建模L(1)=Link('d',0,'a',0.260,'alpha',-pi/2
到底了