
写文章




- @king845
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
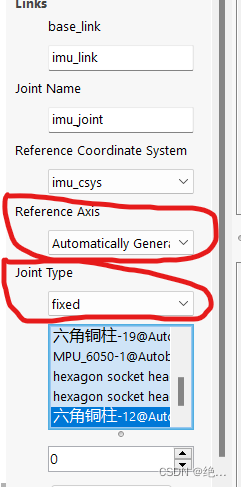
SolidWorks导出urdf并在ROS中用Rviz和gazebo显示
默认已经安装完成urdf插件在SolidWorks中。1.确定基准轴,坐标系①首先选择一个对应的点(用于生成坐标系),点是准备建立坐标系的零件装配体的中心点,可自己建立选取 。(这里选取了主要运动结构的中心点:左右大轮子,底盘,雷达,传感器,相机,与相机相连可旋转机构visual0和1)正在上传…重新上传取消②建立坐标系(以建立的点为参考),x轴向前(前进的方向),z轴向上。正在上传…重新上传取消
到底了