
写文章




- @ifreecoding
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
第4章第7节 二进制信号量(一)
目前更新到5.3节,请在http://dl.dbank.com/c02ackpwp6下载5.3节的全部文档本节源代码请在http://dl.dbank.com/c0fp2g5z9s下载 第7节 二进制信号量某些资源在同一时刻只可以被一个任务操作,实时操作系统的任务抢占特性会导致这些资源可能被多个任务同时操作,从而产生错误。本节将讲述二进制信号量的原理,可以利用二进制信号量保护这些资源
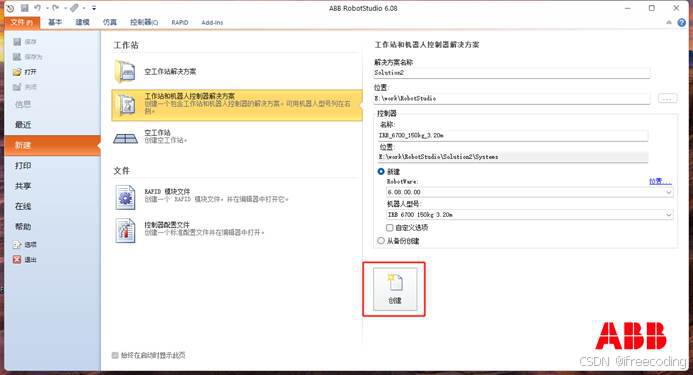
ABB机器人RobotStudio6.08添加外部轴(验证可用,详细记录每个步骤)
外部轴相对机器人的6轴是后加的,在机器人的外部,机器人原有6轴可以联动,为了使外部轴能与机器人的6轴一起联动需要确保是“开启协调”状态。经过上述操作我们已经保存了3个位置的机器人数据,我们每执行一条指令时机器人会协调7轴联动使机器人走到当前MoveJ指令中的位置。下图调节机器人的7轴(内部6轴+外部1轴)改变机器人的位姿。对于实体外部轴,通过下图将机器人安装到外部轴导轨上,外部轴移动时会改变机器人
到底了