
写文章




- @hanqing_zhao
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
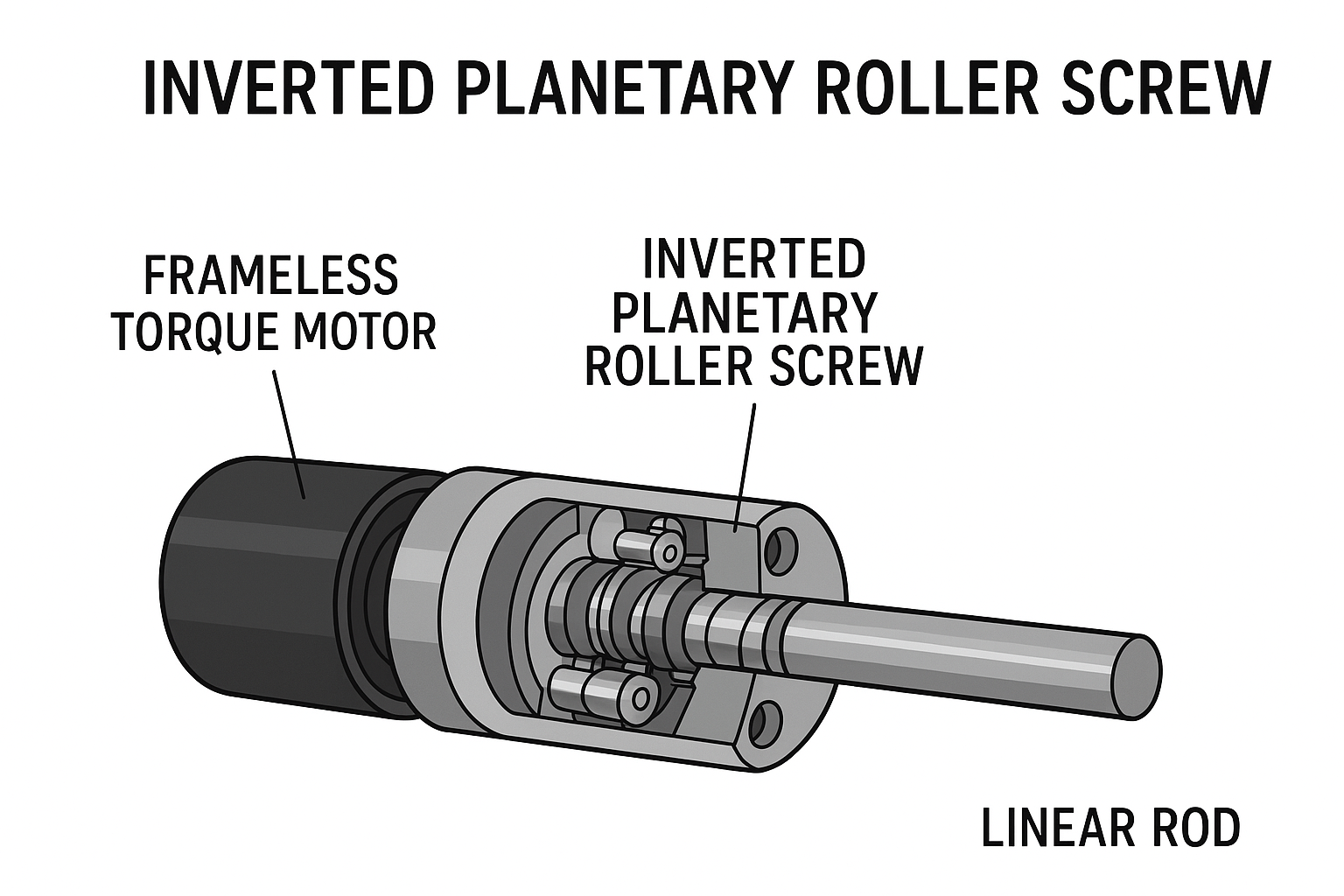
人形机器人关节执行器-反转式行星滚柱丝杠
特斯拉Optimus机器人关节采用反转式行星滚柱丝杠(RPLS)实现高功率密度与精准力控。相比传统方案,RPLS通过螺母旋转、丝杠直线运动的设计,在同等体积下提供2-4倍推力,具备>90%传动效率和优异回驱性,特别适合承受腿部关节的频繁冲击。其线接触结构提升寿命,规则构型更利于规模化生产,完美契合特斯拉对力控性能与量产需求的平衡,成为人形机器人关节驱动的理想选择。
到底了