
写文章




- @fakecoder
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
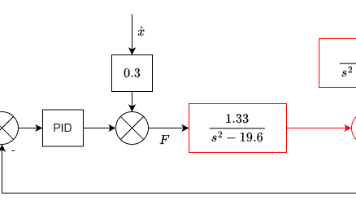
倒立摆自动控制学习笔记(五):级联PID控制器设计(踩坑2)
文章将基于上一篇博客的数学模型,设计PID控制器,即Mmb1b2xθFlN车IN杆P杆fCdρAF−N车−b1x˙Mx¨N杆−fmx¨−θ¨lcosθθ˙2lsinθP杆−mg−mθ¨lsinθθ˙2lcosθP杆lsinθN杆lcosθ−b2θ˙Iθ¨N车N杆f21Cd。
倒立摆自动控制学习笔记(四):LQR控制器设计
内容参考文章推导倒立摆模型并使用LQR进行位置跟踪控制、文章【控制理论】离散及连续的LQR控制算法原理推导以及笔者在学校鲁棒控制课的课程资料。本节内容主要讨论无限时间调节器(Infinite Time Regulator)的情况。
到底了