
写文章




- @Yuze_miao
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
ORCA避障算法梗概
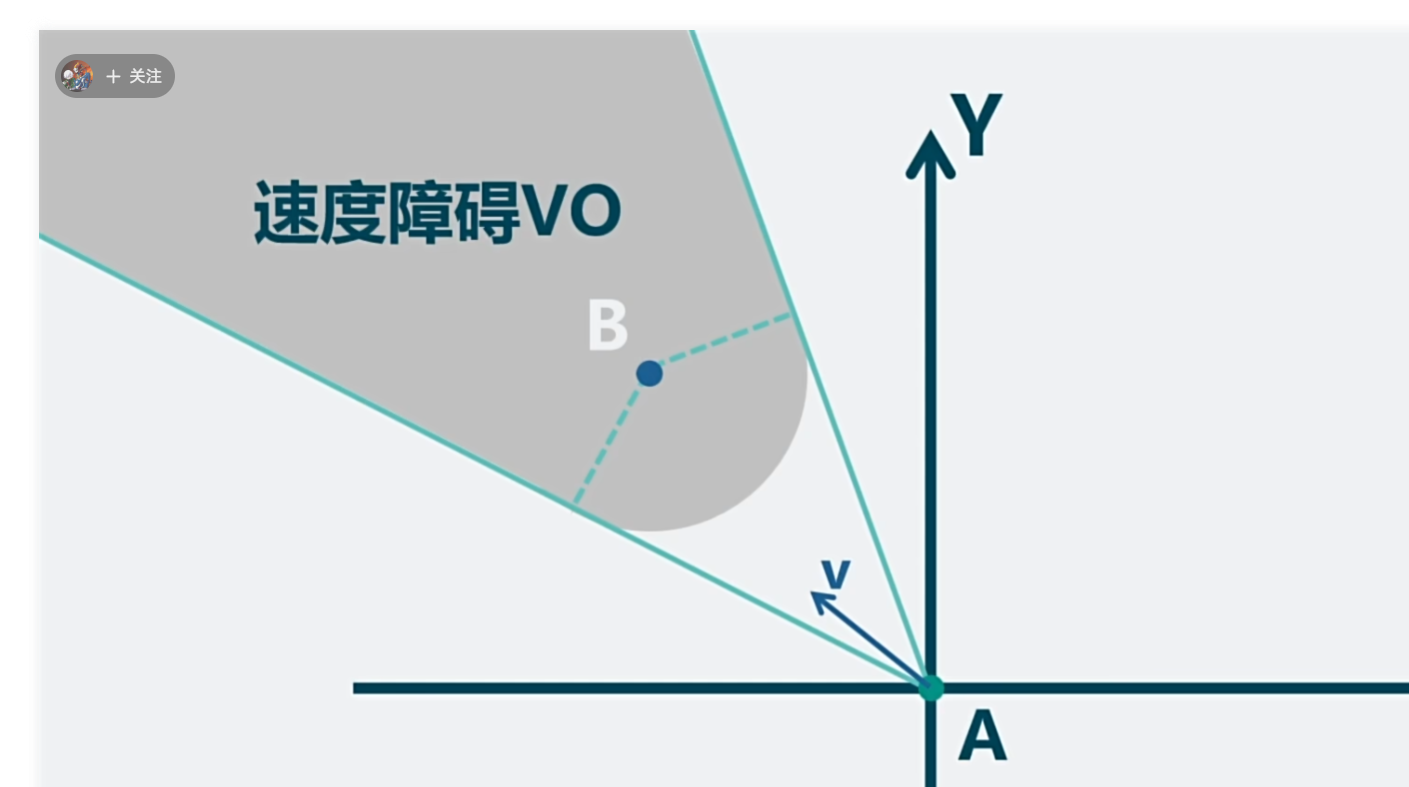
速度障碍是一种几何概念,用于描述两个智能体发生碰撞的所有相对速度集合。对于智能体 A 和智能体 B,以智能体 A 为参考系,智能体 B 的速度障碍区域是一个锥体,锥体的顶点在智能体 A 的位置,锥体的两条边与智能体 B 的边界相切。如果智能体 A 的相对速度落入这个锥体内,那么两个智能体将会发生碰撞。易得以最优速度垂直的外半平面都是可行解,因为任意一个点的向量在u方向上的投影都大于或者等于u。高中
到底了