
写文章




- @TuZhunTec
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
工业3D相机技术路线全面对比:结构光、ToF、双目、线激光该怎么选?
工业视觉正从2D向3D转型,以解决深度信息缺失问题。四种主流3D成像技术各有优劣:结构光精度高但抗光差,ToF速度快但分辨率低,双目成本低但算法复杂,线激光精度最高但需运动配合。选型需根据精度、速度、成本等需求匹配,并注意实测重复精度、表面特性、标定质量等关键因素。未来趋势包括dToF精度提升、固态激光雷达应用、AI处理点云及多传感器融合。实际应用中,稳定精度比参数更重要。

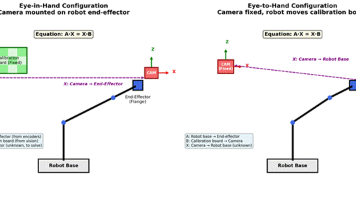
工业机器人手眼标定技术指南--从原理到实践,掌握机器人视觉系统核心标定技术
手眼标定是机器人视觉系统的核心技术,用于确定相机与机器人坐标系的空间变换关系。文章系统介绍了手眼标定的数学模型AX=XB、经典算法(如Tsai-Lenz两步法)、数据采集策略(15-25组位姿、8方位角覆盖)以及精度验证方法(重投影误差<0.5像素)。同时对比了传统方法与深度学习新技术的性能差异,指出工业精密应用仍以传统方法为主。最后强调TCP精度和相机内参是标定前提,并提供完整的工业级解决
到底了