
写文章




- @CUN_CUI
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
ROG-Map:一种高效的以机器人为中心的大场景高分辨率LiDAR运动规划网格地图(论文阅读)
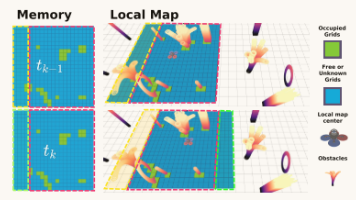
本文提出ROG-Map,一种高效激光雷达占用栅格地图(OGM)方法,用于大场景高分辨率运动规划。主要创新包括:(1)采用机器人中心局部地图和零拷贝滑动策略,通过循环缓冲区实现内存高效复用;(2)提出增量障碍膨胀方法,基于投票计数器机制实现O(n)复杂度,相比传统方法显著降低计算成本;(3)在公共数据集和实际四旋翼测试中验证了性能优势,计算效率提升显著。该方法通过概率更新和截断策略有效处理动态环境,
hw_5_2:闭式求解minmum sanp轨迹优化
前端路径规划搜索出来的路径虽然是无碰撞的,但是没有考虑机器人的动力学(v,a,jerk等),生成的路径不光滑,且不含时间参数。机器人的状态不能突变,只能走走停停,浪费时间和效率。后端轨迹优化,使用minimum snap 对前端给的waypoiints分段多项式拟合,得到光滑的,考虑动力学约束的轨迹。闭式求解(解析求解)与数值求解相对数值求解:通过迭代计算,一步步逼近问题的解。但是得不到一个解的精
到底了